轨道动态几何状态与轮轨力检测数据里程校准方法及应用
2022-11-05赵正阳王冰李洋王文斌麻全周
赵正阳 王冰 李洋, 王文斌 麻全周
1.中国铁道科学研究院集团有限公司城市轨道交通中心,北京 100081;2.天津智能轨道交通研究院有限公司,天津 301700
轨道动态几何状态与轮轨力是评价高速铁路、城市轨道交通等线路的轨道施工质量及服役状态的重要指标。目前,针对轨道动态几何状态和轮轨力检测数据的分析与评价方法的研究已取得诸多成果。文献[1-4]对轨道动态几何状态检测数据的实际应用开展了研究。文献[5-7]围绕轮轨力开展了数据分析与应用研究。文献[8]建立车辆-轨道动力学仿真模型,对轨道不平顺输入和车辆动力响应输出进行了相干分析。文献[9]通过车辆-轨道垂向振动系统模型,研究确定了不同速度下影响车体振动的轨道不平顺最不利波长。
上述研究大多聚焦于轨道某特殊区段或特殊位置,缺乏对轨道全线路的轨道动态几何状态与轮轨力检测数据相关性分析研究。轮轨力检测数据无法有效校准,导致轨道动态几何状态与轮轨力检测数据无法对齐里程,二者的关联性分析也无法全面开展。为解决全线路里程对齐问题,更好地实现轨道状态综合评定,准确地进行轨道质量识别,本文开展轨道动态几何状态与轮轨力检测数据里程校准方法的研究,并进行两类检测数据的关联性分析。
1 动态检测数据里程校准方法
轨道动态几何状态与轮轨力检测设备的数据采集方式分为统一采集与分散采集两种模式。针对不同的采集模式采用不同的方法进行里程校准和统一。
1.1 统一采集模式
统一采集模式,即轨道动态几何状态与轮轨力两种检测设备的里程信息由同一套编码器获得,可直接实现两类检测数据的里程统一。轨道动态几何状态检测数据已具备成熟的里程校准算法[10-11],因此可利用成熟的高精度动态轨检数据里程校准方法[11],实现两类动态检测数据里程校准。具体计算流程见图1。
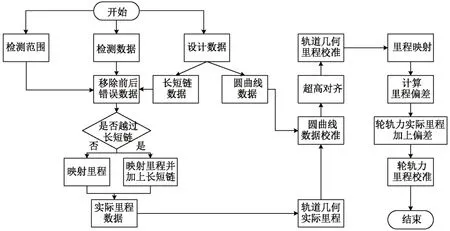
图1 统一采集模式下里程校准流程
在统一采集模式下两类检测数据的里程是统一的,因此可先行校准轨道动态几何状态检测数据的里程,再将轮轨力检测数据的里程与之同步,实现里程数据的校准。
如图2所示,开展轨道动态几何状态检测数据的里程校准时,首先依据检测任务确定检测范围;随后剔除由车辆、传感器导致的异常数据干扰,并正式开展校准工作。主要误差中的车轮半径测量误差与车辆滑动摩擦误差可视为均匀误差,按比例进行缩放校准,长短链误差则根据线路竣工数据给出的长短链对里程进行二次计算校准。

图2 轨道动态几何状态检测数据的里程校准流程
由于轮轨力与轨道几何状态检测数据的里程采用相同的速度里程编码器计算得出,故可采用如下方法对轮轨力检测数据里程进行校准。
设轨道动态几何状态检测数据里程校准前后分别为G{g1,g2,…,g n}和H{h1,h2,…,h n},轮轨力检测数 据 里 程 校 准 前 后 分 别 为L{l1,l2,…,l m}和K{k1,k2,…,k m}。其中gi(i=1~n)、hi(i=1~n)、lj(j=1~m)、k j(j=1~m)为对应检测数据记录的里程数据,m=n。对于第j个轮轨力检测数据的里程l j有

计算可得全部轮轨力检测数据里程校准后为K0。
1.2 分散采集模式
分散采集模式,即轨道动态几何与轮轨力检测数据的里程由两套不同的速度里程编码器计算而得。在分散采集模式中,轨道几何状态校准数据无法对轮轨力检测数据进行里程映射。为实现轮轨力检测数据的里程校准,本文采用特殊区段、线路要素与检测波形关联分析的方法进行校准。
线路中轮轨力检测数据在道岔、圆曲线的直缓点与缓直点、焊缝等关键位置的波形变化较明显,其中道岔处波形峰值最大,圆曲线次之,焊缝处波形峰值最小。因此,将轮轨力校准方法分为三种,随方法升级精度不断提升。具体里程校准流程见图3。

图3 分散采集模式下里程校准流程
1)基于道岔的初步校准
针对轮轨力检测数据的里程校准,由于道岔处数据波动幅值最明显,可先利用道岔对里程数据进行初步校准。利用台账道岔范围,选取该范围前后100 m的数据,通过对数据可视化观察可得到波形数据峰值里程B{b1,b2,…,b q}与道岔接头里程D{d1,d2,…,d p}。设轮轨力检测数据的里程校准后为K1{k1,k2,…,k m},则有

计算可得初步校准后轮轨力检测数据的里程K1。
2)基于圆曲线的二次校准
圆曲线的里程校准步骤与道岔相似。从基础台账中找出圆曲线的直缓点和缓直点,设直缓点与缓直点台账里程分别为Yzh与Yhz,圆曲线峰值特征点为Dzh与Dhz,以K1为轮轨力检测数据校准前里程,即取L=K1,轮轨力检测数据校准后里程为K2{k1,k2,…,k m},则有

计算可得初步校准后轮轨力检测数据的里程K2。
3)基于焊缝的精细校准
通过道岔、圆曲线等特征进行里程校准后,得到初步校准的轮轨力检测数据的里程,进一步利用焊缝数据实现数据的精细化校准。首先采用频谱分析、带通滤波等操作实现信号增强。频谱分析统计发现,在300~400 Hz频段有较强分量,对该频段进行带通滤波能够使焊缝数据特征更为明显。对检测数据进行350~400 Hz的带通滤波处理。同时获取该频率范围内的焊缝台账,通过对数据进行可视化观察,可得到波 形 数 据 峰 值 里 程B{b1,b2,…,b q}与 焊 缝 里 程H{h1,h2,…,h q},q为该100 m查询的焊缝数量。则校准偏差R表达式为

以K2为轮轨力检测数据校准前里程,即取L=K2,轮轨力检测数据校准后里程为K3{k1,k2,…,k m},则有

计算可得初步校准后轮轨力检测数据的里程K3。
2 校准结果的对比验证
选用某地铁线路动态轨道几何检测数据、轮轨力检测数据与圆曲线、道岔、焊缝、长短链等数据,对两种里程校准方法进行验证。
验证统一采集模式里程校准精度时,以线路圆曲线台账为基准,对比校准后轨道几何超高与圆曲线台账的重合度。若校准后的超高曲线拐点与圆曲线关键点重合,则证明里程校准较为准确。
对于分散采集模式,轨道几何里程校准精度验证方法与统一采集模式验证方法相同。轮轨力检测数据的里程校准由于无法直接与台账对齐验证,需采用间接验证方法。基于统一采集模式下里程校准方法的验证结果,通过对比同期轮轨力检测数据,利用统一采集模式校准后的里程与分散采集模式下校准里程的差异,验证分散采集时轮轨力检测数据里程校准方法的精度。
2.1 统一采集模式下里程校准方法验证
统一采集模式下轨道动态几何与轮轨力检测数据里程可以由同一套设备得到,结果相同,因此可通过验证轨道动态几何检测数据里程精度来验证统一采集模式下里程校准方法的精度。从基础台账信息上获取圆曲线特征点数据,再获取轨道动态检测结果中的超高检测数据,对比校准前后里程数据,结果见图4。
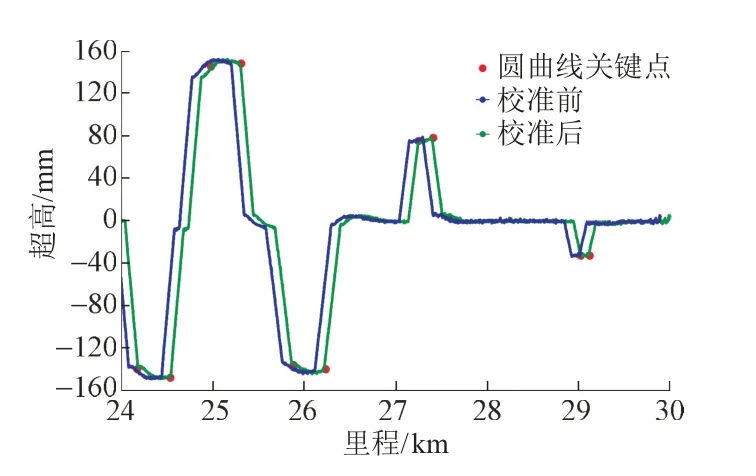
图4 轨道几何检测数据里程校准前后数据对比
选取12期检测结果,每期10个区段,共120个区段对该方法进行验证。将其误差验证结果进行可视化处理(精度0.01 m),结果见图5。可知:主要误差分布于0.25~0.35 m,且最大误差不超过0.60 m。

图5 统一采集模式下轨道几何检测数据里程校准的误差分布
2.2 分散采集模式下里程校准方法验证
1)基于道岔的初步校准
基于道岔台账信息确定道岔范围,并将全线路的轮轨力检测数据波峰与道岔关键点对齐,依次完成全线路轮轨力检测数据里程校准(简称方法一)。选取某线路K8+806处道岔及前后100 m范围内校准前以及统一采集模式、分散采集模式校准后轮轨左侧垂向力检测数据的里程信息,绘制成波形图,见图6。可以看出,以统一采集模式下里程校准后数据为基准,基于道岔的轮轨力检测数据里程校准方法能有效提升里程定位精度。

图6 分散采集模式下基于道岔的里程校准
2)圆曲线校准
在道岔里程校准基础上,从基础台账中找出圆曲线的特征点,针对全线路轮轨力检测数据开展基于圆曲线的里程校准(简称方法二)。选取K8+975.288处的圆曲线台账,曲线半径1 300 m,超高150 mm。提取该里程前后50 m范围内校准前以及统一采集模式、分散采集模式校准后的轮轨左侧垂向力检测数据的里程信息,绘制成波形图,见图7。可以看出,方法二能进一步提升里程定位精度。

图7 分散采集模式下基于道岔及圆曲线的里程校准
3)焊缝精细校准
在道岔和圆曲线里程校准的基础上,进一步利用焊缝数据实现数据的精细化校准。针对全线路轮轨力开展频谱分析及带通滤波,结合焊缝台账信息进行全线路轮轨力检测数据的里程校准(简称方法三)。
该线路K8+706—K8+806范围内共包含5个焊缝,里程分别为K8+706、K8+731、K8+756、K8+781、K8+806。选取该里程校准前以及统一采集模式、分散采集模式校准后里程轮轨左侧垂向力检测数据的里程信息,在350~400 Hz进行带通滤波处理并绘制波形图,见图8。可以看出:采用方法三结合焊缝进行校准可获得更高的校准精度,校准后误差进一步减小。

图8 分散采集模式下基于道岔、圆曲线及焊缝的里程校准
4)里程校准方法效果验证
为对比三种校准方法的优劣,选取12期轮轨力数据,每期数据选择3个道岔区、10个曲线区及10个焊缝区段数据,采用上述方法进行里程校准,并绘制误差分布散点图,见图9。可知:采用方法一、二、三分别可将里程误差降低至10 m内、5 m内、2 m内。

图9 不同里程校准方法误差分布
3 数据综合分析应用案例
将本文里程校准方法应用到轨道动态几何状态与轮轨力检测数据可视化展示软件中,服务于运维工作。
3.1 问题根本原因分析
轨道动态几何状态与轮轨力检测数据表现出不同的特征与关联状态时,问题的根本原因和维修处置策略不同。通过可视化展示软件直观展示数据波形,可辅助分析车辆运行状态异常的根本原因。
案例一:轨道动态几何状态检测数据异常,轮轨力检测数据无异常。说明该处轨道存在长波不平顺问题,需通过轨道精调进行修复。
案例二:轨道动态几何状态检测数据无异常,轮轨力检测数据异常。例如,轨道动态几何状态检测数据未见异常,但轮轴横向力、左脱轨系数、右减载率、右脱轨系数等检测数据异常,说明可能为钢轨焊缝高低接头问题或钢轨内部核伤,需关联钢轨探伤数据进行进一步分析。
案例三:轨道动态几何状态与轮轨力检测数据均异常。这时要查看、分析轨道状态与车辆运行状态进行综合研判,可在一定程度上减少误判,有利于轨道运行状态与车辆运行状态的全方位评价。
3.2 相关病害辅助分析
针对钢轨焊缝、钢轨探伤等多种静态检查手段的数据,可通过可视化展示软件快速检索病害和伤损位置,辅助用户对病害、伤损进行深入分析。
案例四:钢轨焊缝位移超限。例如,现场发现某线路下行K9+300处左股焊缝位移超限。通过对数据可视化,发现该焊缝处轨道几何平顺度较好,但左轨垂向力峰值达90 kN,超出右轨10 kN,需密切关注该处焊缝变化情况,提早制定整修方案,防止因焊缝处位移过大产生过大拉力而导致断轨。
案例五:钢轨探伤综合分析。例如,现场探伤作业定位到某线路上行K22+125处出现钢轨灰斑,伤损达3~4 dB,属于钢轨伤损重伤级别。通过可视化展示软件读取近期轨道动态几何状态与轮轨力检测数据,发现伤损处轨道几何平顺度较好,但轮轴横向力及左股垂向力均较大,说明该处内部伤损已严重影响受力状态,需进行换轨处理。
4 结语
本文针对两种采集模式下的轨道动态几何状态与轮轨力检测数据提出了两种里程校准方法。在统一采集模式下,可先校准轨道动态几何检测数据里程,再将轮轨力检测数据进行里程同步,从而实现动态检测数据里程的校准。在分散采集模式下,轨道几何里程校准与统一采集模式下相同,轮轨力检测数据里程可采用道岔、圆曲线、焊缝数据三阶段逐步校准。选取某线路的采集数据进行了校准结果对比验证,证明了该算法的可行性与校准精确度。将本文里程校准方法应用到轨道动态几何状态与轮轨力检测数据可视化展示软件中,能够发现更深层次的病害问题,进一步证明了本方法的有效性与实际应用价值。
