桥缆索吊装系统自动化控制技术探究
2022-11-05韩洪举郭吉平张基进
韩洪举 郭吉平 张基进
(1.贵州交通建设集团有限公司,贵州 贵阳 550000;2.贵州路桥集团有限公司,贵州 贵阳 550000)
一、基于北斗精准定位的跑车监测技术的开发
(一)北斗精准定位系统组成
精准定位系统主要由基准站服务中心、差分服务系统、车载设备(吊缆小车设备)和位置服务输出端组成。系统结构拓扑图如图1所示。
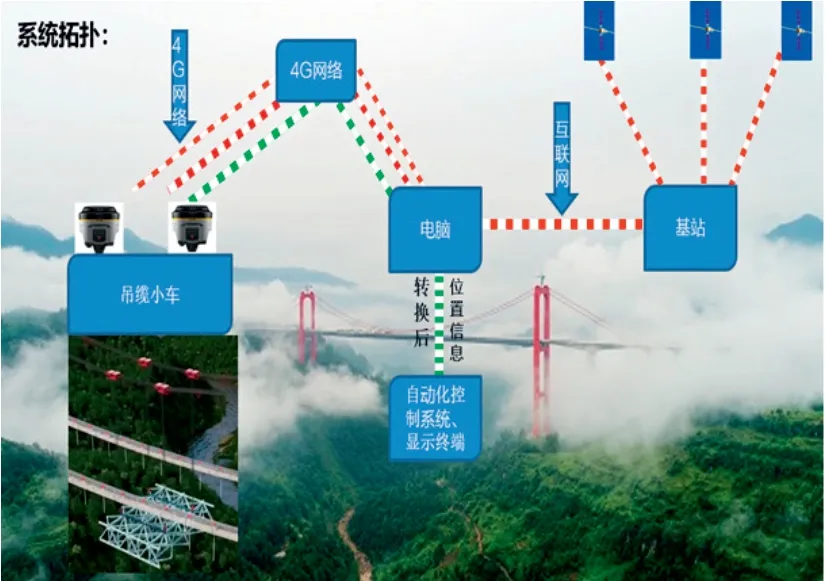
图1 基站服务中心
1.基站服务中心
精准定位系统基准站主要由北斗天线、电缆线、北斗主机、基站数据管理、差分服务软件构成。基站安装示意图如图2所示。

图2 基站安装示意图
北斗基准站用以长期连续跟踪观测北斗卫星信号,通过通讯系统(如网络)实时传输卫星信息,为安装在小车上的机载设备提供实时高精度载波相位差分数据。由于差分信息播发连续性和可靠性与车载移动站定位精度密切相关,它所提供的差分修正信息是保障移动站定位精度的基础。
2.定位终端
北斗定位终端安装在跑车上,用于实时采集跑车的位置信息。每台跑车安装一个,通过4G网络和电脑实时通讯,电脑端实时获取定位终端上传的信息,通过软件分析,分别得到两台小车三维位置和速度。自动化控制系统接收到速度信息后,调节卷扬机的速度,实现与跑车速度的同步;显示系统收到位置信息后,可以对跑车的三维位置进行同步显示。
3.电源保障
跑车端移动定位终端的供电电源使用12V直流供电。一般正常环境下使用5V/2A的移动充电宝作为供电电源,但河闪渡现场施工工况为高空,电源更换难,所以设置太阳能板供电方式,保障定位终端的稳定供电。
(二)跑车定位计算方法
在河闪渡大桥两岸湄潭岸和石阡岸用北斗移动模块定下4个坐标点。湄潭岸是桥的小里程,石阡岸为大里程。河闪渡大桥的湄潭岸索鞍的上游和下游定了两个坐标点,上游部分为跑车1起点坐标,下游为跑车2起点坐标。石阡岸同样也在上游和下游定了两个坐标点,上游部分为跑车1终点坐标,下游为跑车2终点坐标。4个点坐标使用高斯投影坐标,每个坐标是一个三维坐标系,格式为(X,Y,Z)。
4个点定好后,就确定了跑车1和跑车2的起点和终点,它们大致两点一线的运动轨迹,通过终点坐标减去起点坐标,分别对应相减可以得到两个跑车模向量。
跑车偏移量的计算,模拟坐标系以Y轴作为小里程向大里程顺桥方向,X轴作为顺桥水平方向左右偏移量,Z轴作为垂直方向。以跑车1为例,跑车1在上游,跑车1在两岸定起点和终点坐标点可以算出跑车上游的基准向量模。跑车1在实时运动中可以获取到当前实时的高斯坐标。实时坐标与湄潭岸起点坐标形成一个实时的变化的向量模,通过这一实时向量模与上游基准向量模的数积,可以求出跑车1在上游基准向量模上的投影,这一投影长度是跑车对应于桥长(起点、到终点的距离)的直线运动长度。顺桥方向的偏移量通过跑车1实时向量模长度与投影长度根据勾股定理可以求出。偏移量的左右符号,以右为正,左为负,使用实时坐标系x轴和y轴坐标,通过y=kx+b可以求出实时位置处于顺桥方向左边还是右边,如果y>kx+b,就说明点在直线左边,反之在右边。
(三)北斗测量精度试验
1.试验目的
由于首次将北斗精准定位技术应用于跑车监测中,因此需试验北斗测量精度,验证北斗精准定位跑车监测技术可行性。
2.试验方法
该次北斗测量精度试验主要采用卷尺校核法和全站仪校核法校核北斗测量精度。
(1)卷尺校核法
采用卷尺校核法先后在柳州黔桥公司操场、河闪渡乌江特大桥施工现场开展两次校核试验,其中在柳州黔桥公司操场水平检测和高程检测,在河闪渡乌江特大桥桥面水平检测。试验步骤如下:
水平检测:在平整水平面上直线固定布置10m卷尺,在卷尺上设定基准点,将北斗定位终端放置于该点,分别记录基准点卷尺刻度和北斗定位终端座标,然后以步长为5mm移动北斗定位终端沿卷尺,以卷尺读数与基准点刻度值之差来校核北斗定位终端水平位移数值。
海拔高度检测:垂直布置2m卷尺,在卷尺上设定基准点,将北斗定位终端放置于该点,分别记录基准点卷尺刻度和北斗定位终端坐标,然后移动北斗定位终端沿卷尺,以卷尺读数与基准点刻度值之差来校核北斗定位终端高度位移数值。
校核结果:北斗测量和卷尺测量误差≤2cm。图5、图6为在柳州黔桥公司内检测水平数据,图7、图8为在施工现场检测水平数据,图9、图10为高度检测数据。
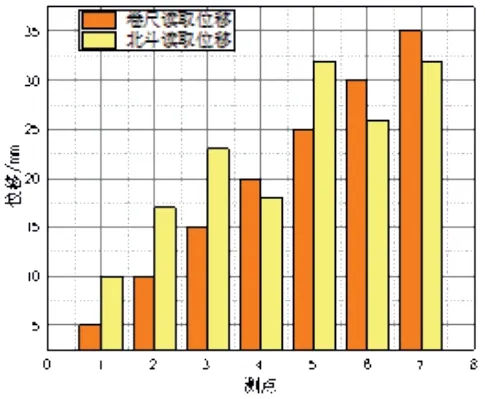
图3 公司内部水平检测数据对比
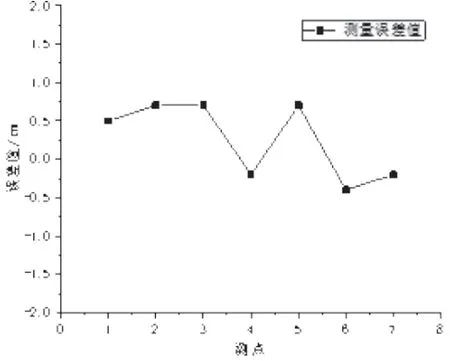
图4 公司内部水平检测数据误差
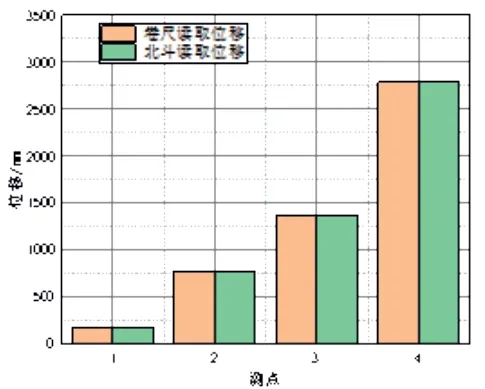
图5 施工现场水平检测数据对比
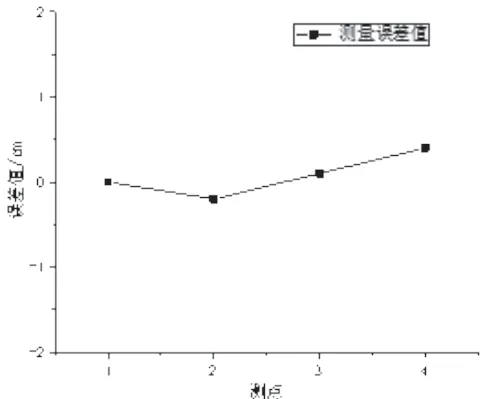
图6 施工现场水平检测数据误差
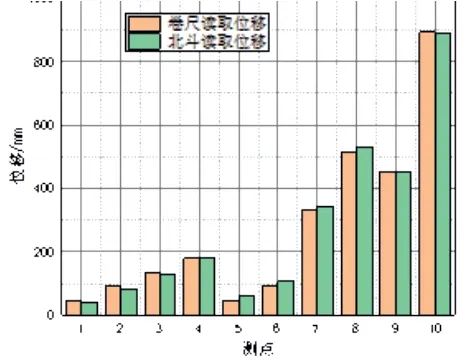
图7 高度检测数据对比
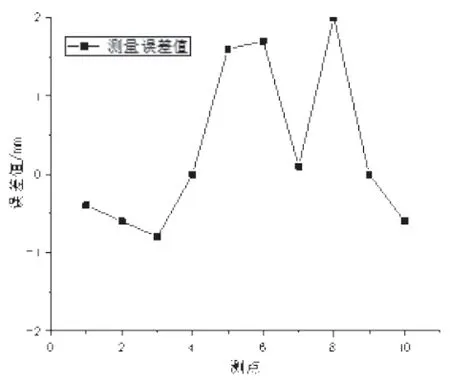
图8 高度检测数据误差
(2)全站仪校核法
采用全站仪校核法在河闪渡乌江特大桥施工现场校核北斗测量数据,首先分段移动跑车,从系统读取各停放点坐标并计算位移,同时采用全站仪测定各停放点坐标并计算位移,比较两种方法得出的位移值,以校核北斗测量精度。
校核结果:北斗测量和全站仪测量误差2cm,表1所示为全站仪校核北斗测量数据。
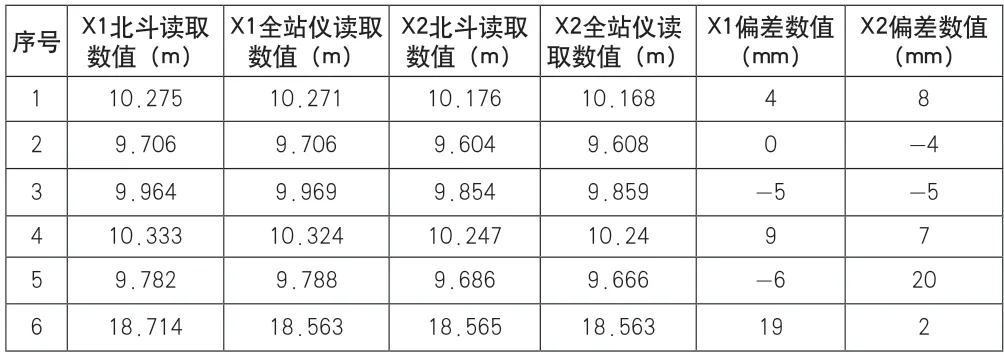
表1 全站仪校核北斗测量数据表
二、基于PLC技术的智能吊装控制系统开发
(一)总控中心
总控中心主要由电控柜、触摸屏、大小里程牵引和起重动作按钮及旋钮、状态指示灯及相关控制线缆组成。电控柜内安装PLC控制单元,通讯模块,根据各个网络传输的信息加以运算处理,实现对大小里程起重牵引卷扬机手动、联动、自动控制。
总控中心承担小车当前状态显示、参数设置、控制操作、报警、数据传输云平台实时显示、存储、展示及共享等功能。
(二)分控系统
分控系统分为大小里程分控系统,分别安装在湄潭岸和石阡岸收绳桶附近,控制同一岸两台起重卷扬机和两台牵引卷扬机。
分控系统主要由电控柜、触摸屏、牵引和起重动作按钮及旋钮、状态指示灯,以及相关控制线缆组成,电控柜内安装PLC控制单元、高数计数器模块、模拟量模块、通讯模块,根据网络传输的信息及采集的加以运算处理,实现起重牵引卷扬机手动控制。分控系统完成起重、牵引卷扬机当前状态显示、数据采集、控制操作、报警等功能。
(三)智能缆索吊装系统的操作控制
1.总控中心操作控制
以起重卷扬机联动操作为例,对其操作控制过程进行详细介绍,具体操作步骤如下:一是将“联动旋钮”旋转到联动状态,联动指示灯亮绿灯;二是按“变频器启动按钮”,变频器电源接通,指示灯亮绿灯;三是在确保能够安全启动系统操作条件下按“系统启动”按钮,系统启动完成,指示灯亮绿灯,同时绞车低速制动打开,主电机风机、风机1、风机2启动;四是旋转对应档位开关,两台起重卷扬机同步收绳或放绳,收绳或放绳指示灯通(收绳亮红灯,放绳亮绿灯),绞车高速制动器打开,卷扬机一档同步低速运行;五是操作员根据现场情况,旋转档位开关选择运行速度;六是当提升接近安装位置,减档低速运行,到达位置后减档停机,同时高速制动闭合,若后续还需要操作,系统可以不进行停止,如没有其他操作可按“系统停止”按钮,低速制动闭合,主电机风机、风机1、风机2停止。
2.分控系统操作控制
以起重卷扬机联动操作为例,对其操作控制过程进行详细介绍,具体操作步骤如下:
一是将“联动旋钮开关”旋转到联动状态,联动指示灯亮绿灯;二是按“变频器启动按钮”,变频器电源接通,指示灯亮绿灯;三是在确保能够安全启动系统操作条件下按“系统启动”按钮,系统启动完成,指示灯亮绿灯,同时绞车低速制动打开,主电机风机、风机1、风机2启动;四是旋转对应档位开关,两台起重卷扬机同步收绳或放绳,收绳或放绳指示灯通(收绳亮红灯,放绳亮绿灯),绞车高速制动器打开,卷扬机一档同步低速运行;五是操作人员根据现场情况旋转档位开关选择所需速度;六是当提升接近安装位置,减档低速运行,到达位置后减档停机,同时高速制动闭合,若后续还需要操作,系统可以不停止,如没有其他操作可按“系统停止”按钮,低速制动闭合,主电机风机、风机1、风机2停止。
三、结语
本文依托湄潭至石阡高速公路河闪渡乌江特大桥建设工程,开展大跨度悬索桥缆索吊装系统自动化控制技术研究,开发一种新的缆索吊装监测控制技术,实现缆索吊装系统索力实时监测、跑车运行状态自动监控,确保施工安全、提高施工效率。
