基于露天矿边坡三维数据融合的边坡雷达监测预警系统
2022-11-05张秋园
文/张秋园
监测露天矿边坡和排土场的稳定性对于露天矿的安全生产和风险管理至关重要。目前,应用最广泛的监测方案是首先通过激光雷达系统获取地形数据,再通过和边坡雷达图像进行三维数据融合,得到三维匹配后的矿区地形图。通过对地形图进行剖面分析和形变分析等,达到对矿区地形形变进行监测和预警的目的。但是,使用激光雷达系统采集地形数据存在不能实时采集并进行上传,无法与矿山辅助生产所采集的数据互联互通,以及采集数据成本高等问题。因此,目前亟需一种高程数据提取方法,独立于三维激光雷达数据采集系统,可以实时提取高程数据并与边坡雷达监测图像进行三维匹配融合,从而实时对矿区中的形变进行监测及预警。
为此,以辅助矿山生产而采集的RTK数据为研究对象,构建一套从离散点高程数据到生成连续面高程数据的高程信息处理系统,以该技术为基础,设计一套基于三维数据融合的边坡雷达监测预警系统,通过对三维地形匹配结果进行分析,以达到对矿区地形进行监测和预警的目的。
一、边坡监测雷达三维数据融合的基本原理
边坡雷达中的三维数据融合,主要是将雷达图像和三维地形数据进行匹配,从而达到将不直观的二维雷达形变监测数据转变为更加贴近人眼视觉习惯的空间三维表达形式,方便雷达图像解译人员迅速定位出形变区域。通常使用的三维地形数据都是以北京54(东北天)坐标系为基准,东北天坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,而雷达图像则以系统本身的位置为坐标原点建立雷达成像坐标系(雷达距离投影(R)、方位(A))二维坐标系。因此要想在边坡雷达中实现三维数据融合,需要将东北天坐标系简化后投影至距离—方位二维坐标系下进行处理和分析。这一过程称为雷达距离—方位坐标系与三维地形坐标系的转换。边坡雷达形变监测数据与三维地形数据的匹配融合处理流程如图1所示。
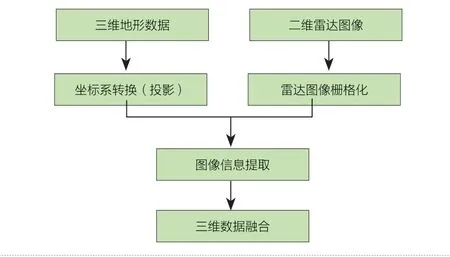
图1 三维数据匹配融合处理原理
对雷达图像和三维地形图分别进行栅格化并建立栅格矩阵,将三维地形栅格矩阵中的点根据坐标转换公式进行计算,从而得到其在雷达图像栅格矩阵中的坐标,以此来建立两个矩阵之间的联系。将雷达图像中包含的图像信息提取并赋值在三维地形栅格矩阵中相应的位置,并将三维地形栅格矩阵中所有的目标点按上述过程逐个投影,即可得到雷达图像信息—高度信息的对应关系矩阵。提取矩阵中栅格的行列值、高度信息建立三维地形模型,接着将雷达图像信息进行提取并在三维地形模型上进行匹配,即实现了边坡雷达中三维数据的融合。
用于融合的三维地形数据通常使用激光雷达进行采集。但是使用激光雷达系统获取地形数据存在不能实时采集并上传,无法与矿山辅助生产所采集的数据互联互通,以及采集数据成本高等问题。鉴于此,目前亟需一种高程数据提取方法,独立于三维激光雷达数据采集系统,可用于与雷达图像进行三维融合,从而实时对矿区中的地形进行监测及预警。为此,以辅助矿山生产而采集的RTK数据为研究对象,提出了一种基于离散稀疏点高程数据的连续面高程栅格化重建技术,用于获取三维地形数据并和雷达图像进行融合。
二、基于离散点高程数据的连续面高程栅格化重建技术
1.连续面高程数据栅格化重建流程
为保证露天矿三维地形数据和雷达图像数据相融合,首先需要获得矿区地形的连续面高程数据。在从矿区采集的RTK数据中获取离散点高程数据后,根据本文创建的连续面高程数据栅格化重建方法,可以实现由离散点高程数据到连续面高程数据的转换。处理步骤包含以下几点:首先,将离散的点高程数据通过要素转线的方式进行线型化处理。为了对高程文件中包含如标识和图例等不正确高程信息的数据进行删除,通过设定二次阈值的方法来进行有效高程数据点的提取,将存在严重高程偏差的数据进行筛除。其次,经过筛除后的高程数据是矢量数据,要将矢量数据进行栅格化,需要采用不规则三角网来建立三维地形模型。不规则三角网是从不规则分布的数据点生成连续的三角形面来逼近地形表面,可以最大程度地还原地表细微的起伏。最后,通过对三维地形数据进行栅格化处理获得所需的连续面高程数据。
2.二次阈值筛选法有效高程数据点提取
由于地形图中高程点对应的高程值和矿区辅助生产测量数据中标注的高程值可能存在差异,如果未对高程数据进行筛选,就直接将其转换成DEM数据并进行地形匹配,那么匹配后的高程图不仅没有反映矿区地形信息的变化,匹配结果中出现的严重地形偏差还可能为矿区边坡形变监测带来安全隐患。因此需要针对高程点对应的高程数据进行筛选,将存在问题的高程数据从有效数据中删除,确保用于地形匹配的高程数据的准确性和有效性。
采用二次阈值筛选方式对数据中包含的有效高程信息进行提取。初次筛选主要是让高程数据与0值依次进行比较,通过循环的方式删除掉小于0的错误高程值。在删除明显存在错误的高程值后,通过第二次阈值设定,筛选出能精确反映矿区形变信息的高程值。在第二次筛选中,首先需要计算初次筛选后的高程值的平均值,接着让每一个高程值和平均值做差并取绝对值。这样处理后可以得到每一个大于零的高程值和平均值之间的绝对差值。根据需要监测场景的不同,设定一个经验值。让得到的绝对差值和经验值进行比较,如果差值小于经验值,则说明该高程值能准确反映矿区内的地形变化,可以用于后续的分析和地形匹配。
3.不规则三角网矢量三维地形建模
经过筛选后的高程数据是矢量数据。要把矢量的线状等高线数据转化成连续面状的DEM高程数据需要进行插值操作。但插值过程不能直接将矢量数据插值成为栅格数据,需要先建立矢量数字网格模型,进而将其插值成为栅格数据。在三维地形匹配中,数字网格模型一般采用两种表示方式。其中规则网格模型数据结构简单,便于使用和管理,但缺点在于无法较好地体现地势起伏、分辨率较低。矿区对于形变监测的精度有着较高的要求,为能够更好地体现出矿区中地形的变化,则采用不规则三角网的方式来构建地形模型。
不规则三角网是从不规则分布的数据点生成连续的三角形面来逼近地形表面,可以最大程度地还原地表细微的起伏,较好地顾及地形特征,因此又被称为“曲面数据结构”。不规则三角网模型中顶点分布具有任意性,因此不规则三角网地形模型能够高精度模拟复杂的地形表面,并有数据冗余小、存储效率高、适合多层表达的特点。
4.矢量三维地形数据的栅格化
在建立不规则三角网矢量三维地形模型后,需要通过插值的方法对其进行栅格化处理。这样做的目的在于可以将矢量的线状等高线数据转化为连续面状的DEM高程数据。在数据栅格化的过程中,需要根据监测场景的不同,设置适当的提取分辨率,分辨率的设置参考边坡雷达数据的分辨率,使得高程数据的地形信息熵趋于稳定,从而确保提取的高程数据中地形信息量基本达到饱和,能够准确地反映出监测区域的形变信息,最终生成连续面状DEM高程示意图。将提取出的高程数据结合雷达采集图像及雷达分辨率和轨道起始与终止点坐标进行数据匹配,最终可以得到有效的三维地形图。
三、基于三维数据融合的边坡雷达监测预警系统设计
通过上述功能的实现,并基于关键技术研究,提出基于三维数据融合的边坡雷达监测预警系统,主要内容如图2所示。该系统通过高程数据提取模块,将RTK获取的稀疏点状高程数据处理成连续面状高程数据,再通过三维数据融合模块将边坡雷达获取的雷达图像进行栅格化,通过坐标转换,提取雷达图像信息并在三维地形模型上进行匹配,从而实现边坡雷达中的三维地形融合。
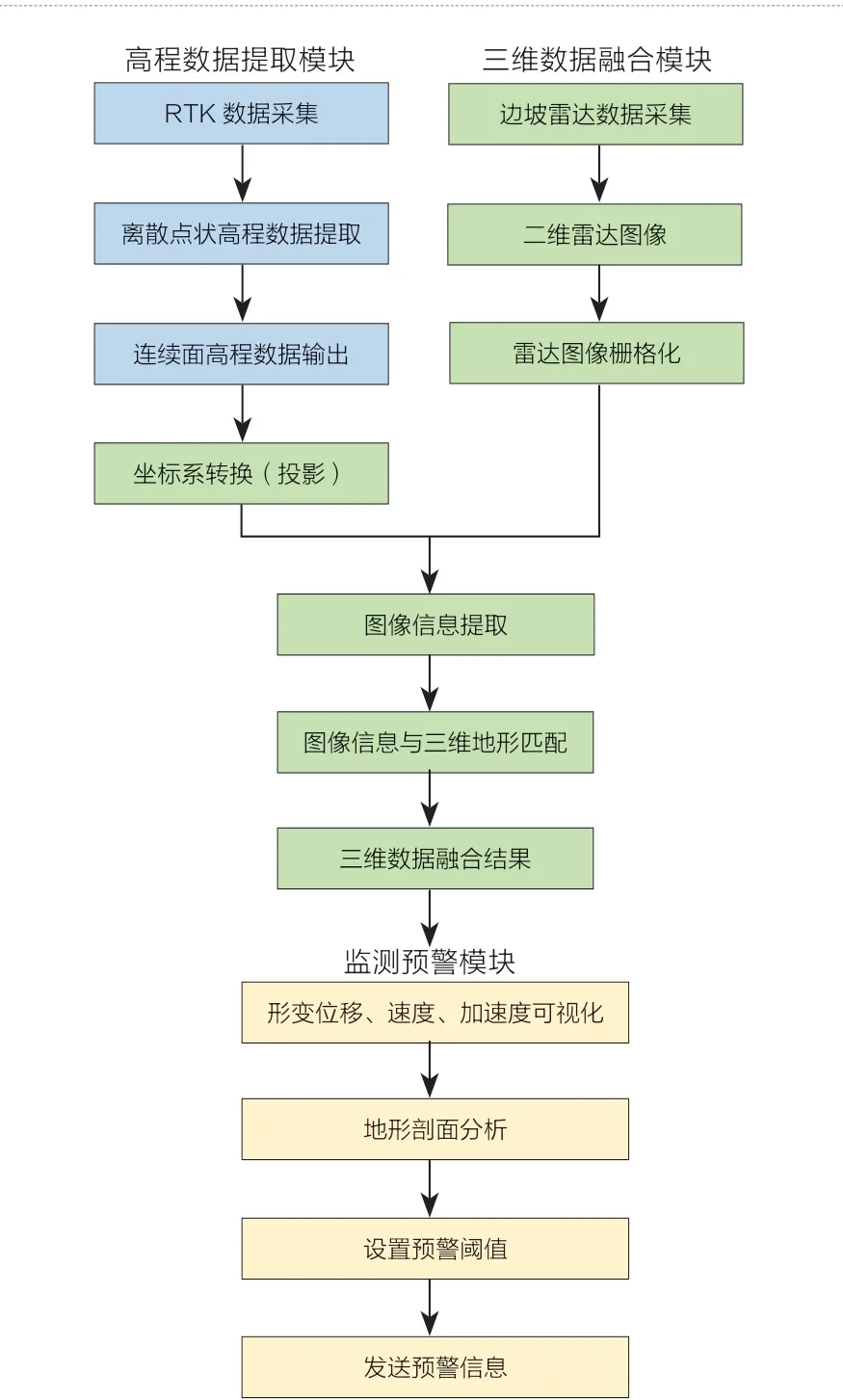
图2 三维数据融合的边坡雷达监测预警系统
基于边坡雷达三维匹配融合的结果,以三维地形数据为底图将边坡雷达获取的形变图像进行匹配,可以对三维融合后的地形进行剖面分析及形变分析并计算其形变量,将形变区域的位移、速度、加速度可视化和精准定位,设置可靠的监测预警机制,通过网页界面的形式将预警信息发送至生产者,及时掌握生产现场的安全状态,以此达到对矿区边坡进行监测和预警的目的。
可靠的监测预警机制通常会提前发送有关滑坡预警的提示,从而保证人员及设备能有足够的时间从问题区域撤离。边坡雷达预警机制一般是基于用户自定义设定的报警阈值预先发出警告,即当滑坡变形达到预先设定的报警阈值时,将触发雷达警报。因此,在针对剖面和形变进行分析后,可以将连续形变面积和单位时间内的位移增长量设为预警指标。当两个指标同时达到预警阈值设定值时触发警报,以此实现边坡雷达的监测预警功能。再通过监测预警模块对监测场景中的位移、速度、加速度进行数据可视化,通过地形剖面分析进行综合数据分析,并将达到预警阈值的数据通过网页发送至用户端实现预警。
四、实测数据分析
通过对元宝山矿区采集的实际数据进行处理,来验证所提出的高程数据提取方法的有效性。
元宝山露天矿位于赤峰市中心城区的东部,采场目前倾向宽度2.6km,走向长度2.4km,深度为220m。经过高程数据提取方法处理后,可以从RTK采集的数据中将离散的点高程数据输出成连续的面高程数据,得到元宝山露天矿北京54坐标系下的三维地形图。再对边坡雷达获取的形变数据进行提取获得边坡雷达形变图。如果直接用于分析边坡的形变,只能得到边坡变形信息,无法进行边坡形变的有效定位,更无法将监测效果与现场的实际情况相匹配。因此,需要将元宝山露天矿三维地形图及边坡雷达形变图根据前文所述流程进行三维匹配融合。由融合后的三维匹配效果图可见,通过本文算法进行处理后的地形图和雷达形变图在进行三维匹配融合后取得了良好的融合效果,从而证明了本文中提出的高程数据提取方法的有效性和可行性。
基于三维匹配融合数据,可以形成地形剖面分析图,通过分析可以直观地掌握发生最大形变的位置,以此来实现对矿区形变的预警,从而为露天矿的生产工作提供安全保障。
五、结论
本文介绍了基于三维数据融合的边坡雷达监测预警原理,提出了离散点高程数据的连续面高程栅格化重建技术,设计了一套基于三维数据融合的边坡雷达监测预警系统。通过利用输出的面高程数据进行三维融合,实现了辅助生产测量数据与边坡安全监测的复合应用,有效解决了露天矿山形变监测时需要采用激光雷达来获取地形数据时的不便,从而有效节约了三维地形数据获取成本。最后通过元宝山露天矿实际数据的处理,验证了本文所提方法的有效性和可行性。
