单车道手动-自动驾驶混合交通流仿真分析
2022-11-03石建军谢君鸿潘芋燕李永行
石建军, 谢君鸿, 潘芋燕, 李永行
(北京工业大学城市建设学部, 交通工程北京市重点实验室, 北京 100124)
自适应巡航控制(adaptive cruise control, ACC)和协同自适应巡航控制(cooperative adaptive cruise control, CACC)技术的应用使自动驾驶车辆上路行驶成为可能,然而自动驾驶替代传统的手动驾驶需要一个漫长的过程,期间由手动和自动驾驶车辆组成的混合流将在道路上长期存在,因此混有手动驾驶、ACC和CACC车辆的交通流系统是研究自动驾驶技术应用的热点。
ACC和CACC车辆装备了雷达和摄像头,能精确捕获外界交通环境信息,感知周边车辆驾驶行为,对前车运动状态的变化快速反应并制定驾驶策略。CACC车辆借助短途无线通信,建立与其余CACC车辆的实时通信,彼此共享行车数据,因此具有捕获精度更高、感知范围更大、行车间距更小的优点。近年来,众多学者聚焦于混合交通流,以手动驾驶和自动驾驶、智能网联车辆为研究对象,分析引入自动驾驶或者智能网联车辆对道路交通流的影响,同时考虑了智能网联车退化的情形;并且基于Nasch模型,融合传统交通流模型和真实驾驶行为,提出和改进了一系列自动驾驶元胞自动机模型,通过数值模拟实现混合交通流的仿真过程。董长印等[1]提出了改进的MCD(modified comfortable driving)跟驰模型,在考虑CACC车辆退化的情形下分析了包含手动驾驶和CACC车辆的混合交通流在瓶颈处的运行特性;Alireza等[2]以含有智能网联车的混合流为研究对象,分析了智能网联车对交通流稳定性和通行能力的影响;邱小平等[3]建立了基于Gipps安全距离的自动驾驶元胞自动机模型,利用数值模拟结果,分析了自动驾驶车辆对道路交通流的影响;Li等[4]对搭载了ACC控制系统的实车进行试验,记录了ACC车辆在各种交通环境下的驾驶行为;Talebpour等[5]分析了智能网联车对交通系统的影响,在微观仿真框架下模拟了手动驾驶车辆和智能车之间的交互过程;王祺等[6]提出了基于安全间距的自动驾驶跟驰行为模型,分析了自适应巡航及协同式巡航对交通流的影响;蒋阳升等[7]考虑智能网联车的队列行为,建立了车辆和车队的元胞自动机模型,并分析其跟车行为。宋伟亚[8]研究了手动-自动驾驶混合交通流特性,针对不同类型车辆的驾驶特点,分别建立了单车道和多车道元胞自动机模型。Jiang等[9]研究了智能网联车对混合交通流的影响,建立考虑了智能网联车队列行为的元胞自动机混合交通流模型。黑凯先等[10]研究了智能网联交通环境下的新型混合车流,建立了智能车和人工车的换道行为决策模型。孙雪东等[11]研究了自动驾驶车辆比例对交通系统效率的影响,建立了单车道元胞自动机模型。
现有研究在对含有手动驾驶车辆和智能网联车辆的混合交通流建模时,虽然考虑了CACC车辆功能退化为ACC的情形,但并未对手动驾驶、ACC和CACC三类车辆独立存在的道路交通流系统进行研究。因此,分别建立手动驾驶、ACC和CACC车辆的动力学模型,分析不同渗透率的ACC和CACC车辆对混合交通流行驶速度、行车间距、拥堵状况和道路通行能力等运行特性的影响,其中,手动驾驶车辆采用Gipps安全距离模型[12],自动驾驶车辆采用加州伯克利大学PATH实验室通过实车标定的ACC和CACC模型[13]。
1 模型建立
对于手动驾驶车辆,考虑驾驶员的生理、心理状态和外界交通环境的影响,为确保行车安全,结合驾驶员正常的反应时间,基于Gipps安全间距和速度,构建元胞自动机模型;ACC和CACC车辆的运动过程由车载雷达和摄像头感知周围车辆的运动状态、计算机制定行车策略、控制单元执行决策组成,其中CACC车辆具有通信功能,能实时共享行车数据,采用加州伯克利大学PATH实验室标定的ACC和CACC模型来仿真车辆的跟车行为。
1.1 Gipps安全间距
根据Gipps安全模型,考虑驾驶员的反应时间,为保证行驶安全,车辆n在跟随前车的过程中所需要的最小安全距离和最大安全速度分别由式(1)、式(2)求得。
dn,safe=xn-1(t)-xn(t)-ln-1
(1)

(2)
式中:dn,safe、vn,safe(t)分别为车辆n跟随前车所需要的安全间距和速度;xn(t)、vn(t)分别为t时刻车辆n所在的位置和行驶速度;xn-1(t)、vn-1(t)分别为t时刻车辆n的前车所在的位置和行驶速度;ln-1为车辆n的前车车长;b为车辆的最大减速度;τn为车辆n驾驶员的反应时间。
对于手动驾驶车辆,反应时间为驾驶员感知前车运动状态变化并执行驾驶操作的时间;对于ACC车辆,反应时间为车载传感器捕获前车驾驶信息和中枢计算机系统制定驾驶策略的时间,相较于手动驾驶车辆更小;对于CACC车辆,当跟随的前车同为CACC车辆时,则可实现与前车的实时通信,反应时间可忽略,否则,CACC车辆功能退化为ACC。
1.2 跟车模型
参考Nasch模型加速、减速、随机慢化、位置更新四步规则[14],构建考虑Gipps安全距离的元胞自动机模型。
1.2.1 加速
当dn>dn,safe时,为追求更高的行驶速度,车辆n会加速。
vn(t+1)=min[vn(t)+an,vmax,dn,vn,safe(t)]
(3)
式(3)中:vn(t+1)为车辆n下一时刻的速度;an为车辆的加速度;vmax为车辆的最大速度;dn=xn-1-xn-ln-1为车辆n车头至前车车尾的距离。
对于手动驾驶车辆,an=amax,其中amax为车辆的最大加速度;对于ACC车辆,an=min(a*,amax),a*由式(4)求得。
a*=k1[xn-1(t)-xn(t)-thwvn(t)]+
k2[vn-1(t)-vn(t)]
(4)
式(4)中:k1和k2为模型控制参数;thw为期望车间时距。
对于CACC车辆,若其前车为手动驾驶或ACC车辆,则通信功能发生退化,速度更新规则与ACC车辆相同,否则,与前车可实时共享行车数据,加速规则遵循式(5)。
(5)
1.2.2 减速
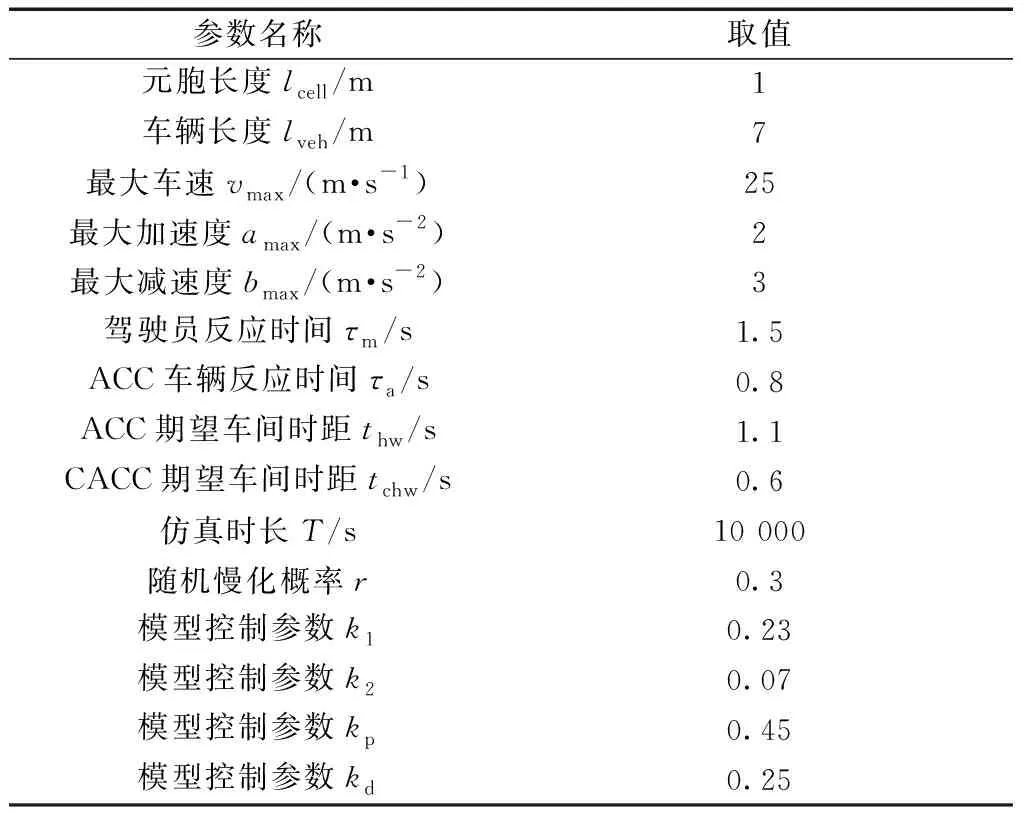
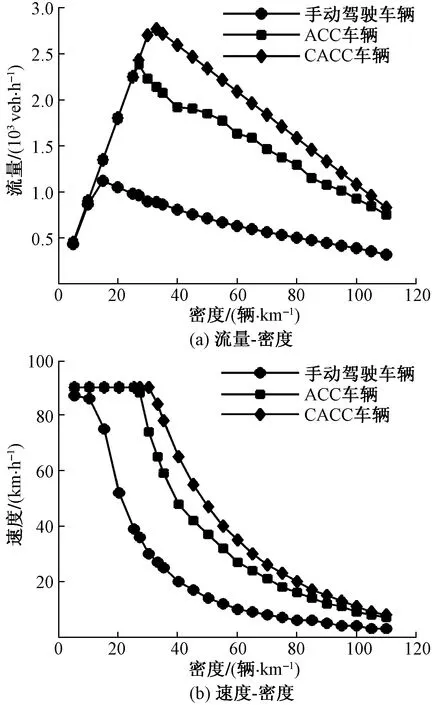
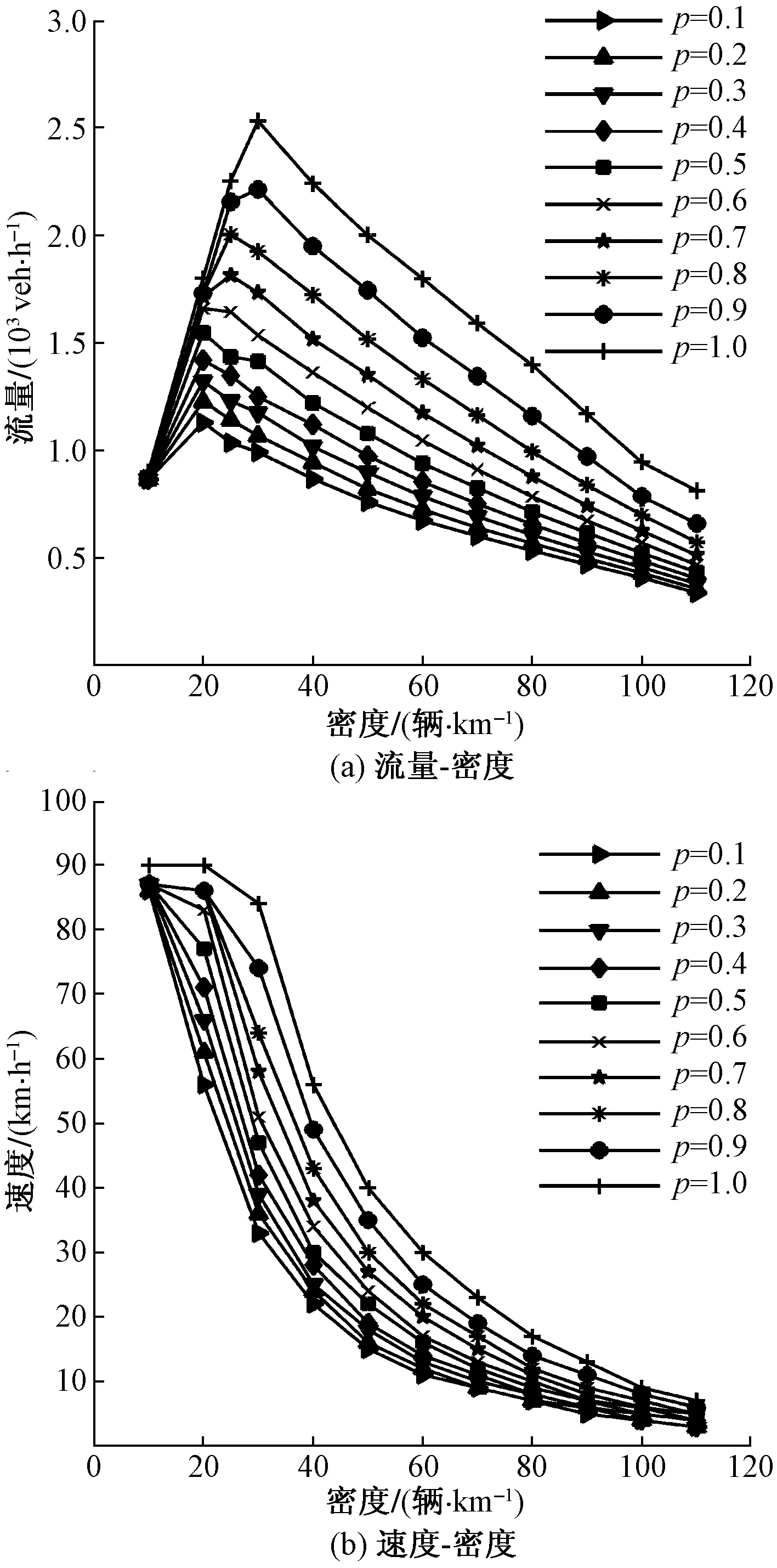
当dn (1)安全减速。 vn(t+1)=max{min[vn,safe(t),dn-1],0} (6) (2)确定性减速。 vn(t+1)=max{min[vn,safe(t),dn],0} (7) (3)匀速行驶。 vn(t+1)=min[vn(t),dn] (8) 1.2.3 随机慢化 对手动驾驶车辆,引入慢化概率r,模拟随机减速过程;对ACC和CACC车辆,不受人为因素的影响,无随机慢化。 vn(t+1)=max[vn(t)-b,0], rand(1) (9) 式(9)中:rand(·)为随机函数。 1.2.4 位置更新 车辆完成速度更新后,更新下一时刻的位置。 xn(t+1)=xn(t)+vn(t+1) (10) 式(10)中:xn(t+1)为车辆n下一时刻的位置。 以长度L=5 km的快速路单车道为例,采用周期性边界条件。仿真初始时刻将手动驾驶、ACC和CACC三类车辆离散分布在道路上并赋予初始速度(取值范围为[5,vmax])。仿真时长为10 000 s,为消除随机暂态影响,记录最后1 000 s的数据进行分析;设道路车辆数为N,交通密度k=N/L,车辆平均速度为 (11) 仿真参数及其取值如表1所示。 表1 仿真参数Table 1 Simulation parameters 利用MATLAB仿真平台,搭建了手动驾驶、ACC和CACC三类车辆独立存在时的单车道交通流场景,在不同的ACC和CACC车辆渗透率下仿真了车辆的跟车行为。 图1 交通量-密度-速度关系图Fig.1 Traffic volume-density-speed diagram 2.2.1 基本图分析 道路由纯手动、ACC或CACC车辆驾驶时的交通量-密度-速度关系如图1所示。由图1(a)可知,在交通密度较小时,三类车辆的流量与密度均呈线性关系,此时交通流处于自由流状态;随着密度的增大,手动驾驶车辆率先达到临界密度,而ACC和CACC车流量仍随密度线性增加;当ACC和CACC车辆达到临界状态时,交通密度分别为27辆/km和33辆/km,此时对应道路的通行能力分别为2 382辆/h和2 769辆/h;当交通密度继续增大时,道路上车辆越来越多,致使车辆相互制约、干扰严重,车流缓慢行驶,交通流处于拥堵状态。由图1(b)可知,随着交通密度的增大,手动驾驶车辆平均速度逐渐减小,ACC和CACC车辆先保持自由流速度行驶,达到临界状态后速度递减;对应于道路同一交通密度,ACC和CACC车辆平均速度均显著高于手动驾驶车辆,CACC车辆行车间距更小、感知范围更大,平均速度高于ACC车辆。 图2 不同渗透率下的基本图Fig.2 Fundamental diagram with different penetration rates 以自动驾驶车辆渗透率p为0.1~1.0进行10组等间距数值仿真试验,在每一渗透率中ACC和CACC车辆的数目相等,分析引入ACC和CACC车辆对混合交通流运行特性的影响。由图2(a)可知,在道路同一交通密度下,随着手动驾驶车辆中混入的ACC和CACC车辆越多,道路车流量得到了显著提高,当p=1.0,即道路仅由数目相等的ACC和CACC车辆驾驶时,通行能力达到了2 529辆/h,是纯手动驾驶时的2.2倍。由图2(b)可知,随着道路交通密度的提高,车流行驶速度均呈下降趋势,但其随ACC和CACC车辆渗透率的增加而显著提高。当CACC车辆前车为手动驾驶或ACC车辆时,车车通信功能失效,研究CACC退化为ACC车辆对道路通行能力的影响。设自动驾驶车辆初始混入率为p,则ACC和CACC车辆混入率均为p/2,手动驾驶车辆混入率为1-p,交通系统稳定时CACC不发生退化概率为p2/4,退化率为p(1-p/2)/2,p(1-p/2)/2在p=1时取极大值,此时道路为纯自动驾驶,表明在CACC车辆比例较小时,退化率高;当p=1.0,且CACC车辆比例越高时,退化率越低,此时CACC车辆具有更小跟车间距、更短反应时间的优势得以发挥,将显著提高道路通行能力和车辆平均速度。 2.2.2 行车间距和速度关系分析 从微观角度出发,车辆速度的变化源于与前车间距的改变,分析行车间距和速度的变化关系,研究混合交通流中手动和自动驾驶车辆的跟车特性。图3为道路交通密度在30辆/km、仿真时间t=9 800 s、不同ACC和CACC车辆渗透率下所有车辆的行车间距和速度分布。 图3 行车间距和速度分布Fig.3 Distribution of car-following space gap and velocity 图3(a)为纯手动驾驶,此时车辆行车间距和行驶速度均呈无规律离散分布,平均车间距和车速分别为27.0 m和8.6 m/s。图3(b)中,编号前90散点为手动驾驶车辆,后60为ACC和CACC车辆车间距和速度分布,可知引入ACC和CACC车辆后手动驾驶车辆车间距呈现出增大的趋势,达到35.2 m,而ACC和CACC车辆车间距分布集中且更小,仅为13.0 m,速度分布表明其在以较小间距跟随前车时仍能保持较高的速度,平均车速为11.4 m/s。 图3(c)中,编号前30散点为手动驾驶车辆,其车间距分布与ACC和CACC车辆呈现出分化趋势,达到50.5 m,远高于ACC和CACC车辆的20.3 m,速度分布表明ACC和CACC车辆略高于手动驾驶车辆。道路上存在更多的自动驾驶车辆会使手动驾驶车辆与前车保持更大的间距,而自动驾驶车辆能感知前车运动状态,并快速做出决策,因而能以较小的间距保持较高的速度跟随前车,极大提高了道路空间资源利用率。 图3(d)为纯自动驾驶,编号前75散点为ACC车辆,后75为CACC车辆车间距和速度分布。可知相比ACC车辆,CACC搭载的通信系统能实时感知周围车辆的行驶状态,并以更小的间距跟车,因此在交通流达到稳态时CACC车辆的行车间距并不会发生剧烈变化,平均车间距为23.7 m;而少量离散分布的点为CACC车辆功能退化为ACC后无法与前车实时通信、共享行车数据,行车受到前车运动状态变化的影响较大,故车间距波动较大。车速分布表明ACC和CACC车辆均能保持自由流速度行驶,此时交通流处于自由流状态。分析车辆行车间距和速度关系可知,当道路中混入的ACC和CACC车辆越多,越有利于行车的稳定性,提高车流的行驶速度。 2.2.3 车辆时空轨迹特性分析 图4为道路交通密度在30 veh/km、仿真时间9 000~10 000 s、不同ACC和CACC渗透率下的车辆时空轨迹图。由图4(a)可知,当道路为纯手动驾驶时,轨迹图上阻塞带宽度较大且存在时间长,表明道路在长时间内处于拥堵状态,车辆走、停现象多发且交替。如图4(b)所示,当p=0.4时,阻塞带仍然存在,但其宽度和存在时间减小,小阻塞、消散快的特点凸显。如图4(c)所示,车辆时空轨迹线清晰、顺直,交通流处于快速行驶的状态。如图4(d)所示,当p=1.0时,ACC和CACC车辆行车间距小、行驶速度高,交通流处于自由流状态。根据以上不同渗透率下的车辆时空轨迹特性分析,当手动驾驶车辆中混入的ACC和CACC车辆越多,轨迹图上形成的交通阻塞范围逐渐减小且拥堵很快得到消散,拥堵波的反向传播及其对交通流的扰动影响逐渐减弱,ACC和CACC车辆改善了交通运行,减少了交通瓶颈的发生,有效缓解了交通拥堵。 图4 不同渗透率下的轨迹图Fig.4 Trajectory diagram with different penetration rates 2.2.4 交通流时空拥堵特性分析 为了量化分析引入ACC和CACC车辆对交通流运行效率的影响,定义拥堵指数CI即交通稳态下拥堵车辆与道路车辆总数之比来描述交通系统拥堵状况,可表示为 (11) 式(11)中:CI为道路拥堵指数;n(t)为在仿真时间t所有速度小于6 m/s的车辆即拥堵车辆数目。 图5为道路交通密度在60辆/km、仿真时间9 000~10 000 s、不同渗透率下的速度时空图。由图5(a)可知,当道路为纯手动驾驶时,交通拥堵现象严峻,CI达到了92.89%,车辆以低速缓行为主。如图5(b)所示,当p=0.4时,路段拥堵现象多发,CI下降至76.62%,在部分路段车辆能以中高速行驶。如图5(c)所示,当p=0.8时,路段拥堵现象大幅减少,仅在局部路段车辆低速行驶。如图5(d)所示,当p=1.0时,CI降至30.91%,车辆以中高速行驶为主。根据以上不同渗透率下的交通流时空拥堵特性分析,当手动驾驶车辆中混入的ACC和CACC车辆越多,道路拥堵状况逐渐好转、拥堵指数大幅降低;当ACC和CACC车辆渗透率达到100%时,CI由92.89%降至30.91%,显著缓解了交通拥堵。由于ACC和CACC车辆能感知周围车辆的运动状态,并快速制定跟车策略,因而能以较小的间距保持较高的速度跟随前车,提高了交通运行效率。 图5 不同渗透率下的速度-时空图Fig.5 Diagram of space, velocity and time with different penetration rates 自动驾驶技术的出现为解决城市交通问题提供了有效的解决途径,其在保障交通安全、提高交通效率、减少交通污染方面将发挥重要的作用。 (1)对手动驾驶、ACC和CACC三类车辆独立存在的单车道混合交通流进行研究,建立元胞自动机跟车模型,通过数值仿真试验,分析引入ACC和CACC车辆对道路交通流运行特性的影响。 (2)随着ACC和CACC车辆渗透率的增加,道路通行能力和车辆行驶速度不断提高。当道路仅由数量相等的ACC和CACC车辆驾驶时,通行能力达到了2 529辆/h,是纯手动驾驶时的2.2倍。 (3)引入ACC和CACC车辆增大了手动驾驶车辆的行车间距,而ACC和CACC车辆仍能以较小的间距保持较高的速度跟随前车,充分利用了道路空间资源;当其渗透率达到100%时,道路拥堵指数由92.89%降至30.91%,显著缓解了交通拥堵、改善了交通运行环境。2 数值模拟与结果分析
2.1 场景设置
2.2 仿真及结果分析
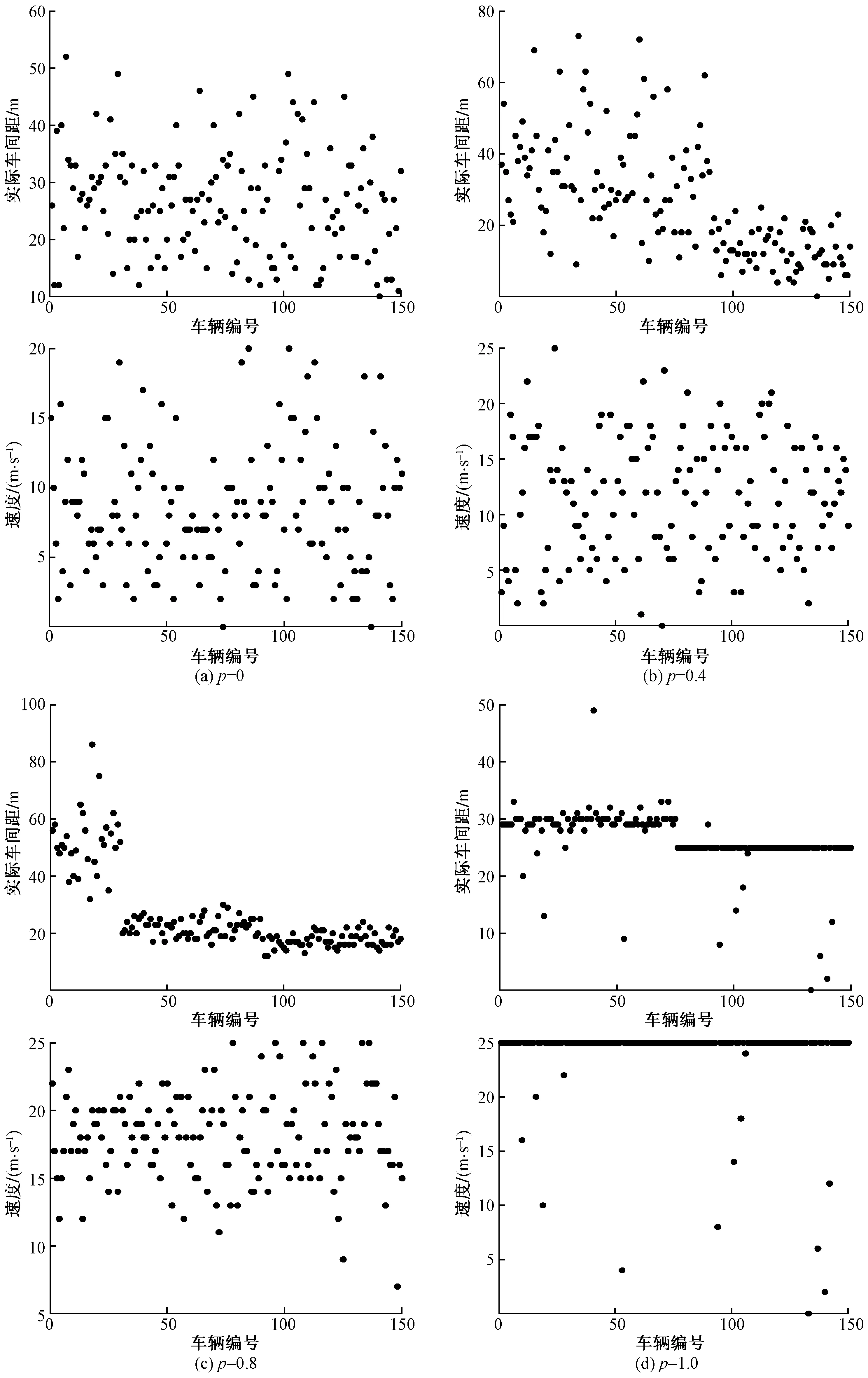
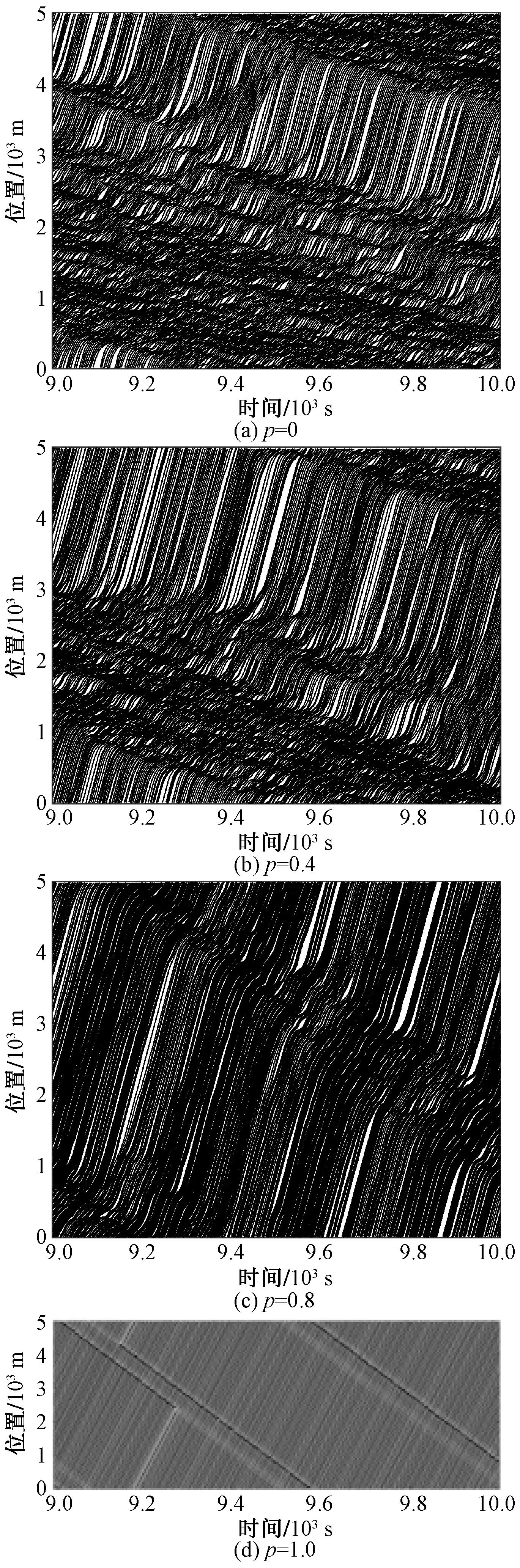
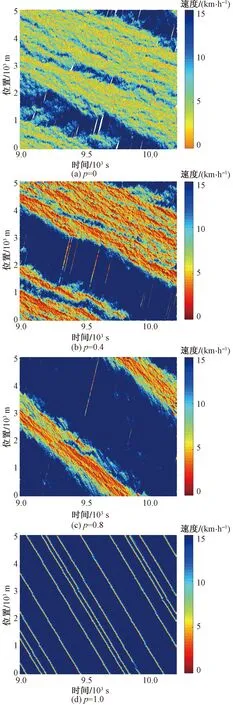
3 结论
