基于红外感应的新能源汽车主动刹车控制系统
2022-11-03王伟伟李京娜陈娅君
王伟伟,李京娜,陈娅君
(云南工商学院,云南昆明 651701)
新能源汽车包括混合动力汽车、纯电动汽车和燃料电池汽车等。在当前环境污染与能源危机两方面问题日益严峻的背景下,新能源汽车受到了人们的广泛关注,并且越来越多的人开始购买这一类型汽车。当前,制约新能源汽车发展的主要因素包括车辆的电池储存量过低、充电时间过长等[1]。在城市工况条件下,新能源汽车在行驶的过程中,有超过30%的能量被用于驱动车辆运行以及制动过程中的消耗。若能够有效利用这部分能源,则可在极大程度上提升车辆整体经济性能[2]。同时,当前交通运输变得日益繁忙,疲劳驾驶、酒后驾车等都会造成安全事故,且这一类型事故频繁发生。有效防止车辆的碰撞是实现自动刹车装置经济实用性的主要研究方向,同时也是亟待解决的问题。针对这一问题,相关领域研究人员开展了深入的探究,并尝试研发出可实现汽车主动刹车控制的系统。但是目前,研发出的控制系统一方面不适用于新能源汽车,另一方面在实际应用中系统的灵敏度不高,产生的刹车信号距离范围较小,无法为驾驶人员以及刹车装置提供有利的响应时间等[3]。因此,针对上述问题,为了进一步提高新能源汽车运行安全性,本文尝试引入红外感应技术,开展对新能源汽车主动刹车控制系统设计研究。
1 系统硬件设计
为实现新能源汽车在行驶的过程中,对其刹车进行主动控制,本文引入红外感应技术,控制系统硬件结构,如图1所示。
结结合图1可以看出,该刹车控制系统中包含新能源汽车本身自带的速度表以及频/伏转换器、电压比较器、稳压电源、红外线发生器等装置。系统中各个硬件连接后,分析汽车主动刹车控制的主要原理,具体为:新能源汽车在行驶的过程中,其速度可以通过电磁速度表显示,该装置发射一个频率脉冲信号。若新能源汽车的行驶速度越快,相应频率越高,反之,则相应频率越低。将获取到能够表示汽车行驶速度的脉冲信号输入到频/伏转换器中,并通过该装置实现对信号的转换[4]。当频率足够高时,此时电压信号会触发电压比较器发生翻转,并进一步触发红外线发射装置,由该装置发出脉冲调制红外光。通过红外光检测汽车行驶时周围是否存在障碍物,并实现对刹车控制装置的主动控制,达到刹车效果。根据上述论述,本文主要针对刹车控制系统中的红外线发射器、频/伏转换器进行选型设计说明。

图1 基于红外感应的刹车控制系统硬件结构
1.1 红外线发射器选型
该系统选用TSAL6200型红外线发射器,红外线发射电路如图2所示。该型号发射器的主要参数:最小辐射强度为40mW/sr;波长为940nm;电压-正向(Vf)为1.35V;最小电源电压为3V;最大电源电压为6.5V;运行过程中的温度为-40~85℃;视角为34°。TSAL6200型红外线发射器电路工作原理:将频/伏转换器集成电路与该电路连接,汽车在行驶过程中车速频率信号从15脚输入,并在A1输出端转换为与输入频率成正比例关系的负向直流电压。利用RW1实现对电压幅值的调节,并将调节后的信号送入到电压比较器中,将电压数值与预置电压数值进行对比[5]。当汽车行驶速度低于设定的阈值时,则A3输出电压,并经过R2输入到比较器中,促使T1达到饱和并导通。在这一过程中,为确保TSAL6200型红外线发射器的稳定运行,将CW46890型三端式集成稳压电源与其进行连接,同时CW46890型稳压电源也可为整个连接电路提供静态偏置电压。这一电源装置所需的电源由新能源汽车的电瓶提供。
1.2 频/伏转换器选型
选用SN74LVC2GU04DCKR型频/伏转换器,该频/伏转换器电路为2Circuit型电路;逻辑系列为74LVC;逻辑类型为Inverting;运行过程中电源电压最大值为5.5V,最小值为1.65V;运行中的工作温度最大值为+125℃,最小值为-45℃;采用SC70-6封装结构,输入的信号为CMOS或TTL类型。除此之外,SN74LVC2GU04DCKR型频/伏转换器运行中高电平输出电流为32mA,低电平输出电流为-32mA。各项运行参数均符合本文刹车控制系统对频/伏转换器提出的选型要求。
2 系统软件设计
2.1 新能源汽车主动刹车控制指令的接收与发送
为实现对新能源汽车主动刹车控制,在进行模糊控制前,首先需要确定系统中控制指令的接收和发送方式。在新能源汽车行驶过程中,针对刹车装置的参数变化,可通过RS485串口接收的方式获得控制系统的控制请求,并通过单片机完成对各项程序的执行中断。接收数据包括稳压电源运行数据、电压比较器比较结果数据、速度表显示数据等。其中稳压电源运行中的电压可通过公式(1)计算得出:

式中,U'为稳压电源运行电压,δ为占空比,U为输入电压。公式(1)中,δ可通过导通时间T与开关时间t的比值得出,其表达式为:

通过单片机判断传输的数据是否为接收数据,若是接收数据则进入相应处理机制当中,若不是接收数据,则该数据在传输过程中,数据传输串口不对其产生反应。当发出控制指令后,由刹车控制系统中的MCU结构判断是否可以满足请求包的需求,再针对寄存器的数量是否满足预置要求进行判断,若满足则还需要对起始地址是否正常以及起始地址和寄存器数量是否正常进行判断。在完成判断后,对请求进行处理,并查看读/写多个寄存器是否处于正常运行的工作状态。最后由刹车控制MCU发送正常响应的数据包,由SN74LVC2GU04DCKR型频/伏转换器负责接收,并将控制数据转变为控制装置能够识别的控制指令。
在接收到主动控制的请求时,刹车控制主芯片先对其数据帧的地址进行解析,并判断该帧是否为发送给主芯片的帧。若得出的判断结果是数据帧地址正确,则对其功能码进行解析处理,并能够判断功能码是否正确。若正确则进入到数据接收模块中,若不正确则自动跳过这一环节。再从数据帧当中去除掉最后CRC校验的两个字节,并对处理后的数据帧进行CRC16校验。将检验得出的数值与标准CRC校验数值进行对比,若数值相同,则说明检验正确,若数值不同,则说明检验错误。接收正确检验的数据帧,并将标志位flag设置为零,同时将产生的应答数据返回。若在上述过程中,出现数据帧存在地址错误或功能不正确等问题,则通过控制系统的控制器返回存在异常的代码,并将标志位flag设置为1,同时控制系统自动中断跳出串口,等待下一次请求中断。据此,完成对主动刹车控制指令的接收和发送。
2.2 基于红外感应的刹车角度模糊控制
在对新能源汽车进行主动刹车控制时,引入红外感应技术,基于上述选择的TSAL6200型红外线发射器,通过对红外线的接收和处理,对刹车角度进行模糊控制。红外线发射器启动后,通过红外线接收电路完成接收,在信号放大电路中对其产生的信号进行处理,再进行检波整形。通过红外线接收二极管接收发射器发出的红外脉冲信号,利用IC对红外线信号放大,并在这一过程中完成对信号的滤波、计分检波等操作,以此提供偏置电压。根据得到的偏置数据,将刹车的制动分为紧急停车和定位停车两种。在紧急停车时,通过主控制器传递红外线信号,此时刹车控制器能够快速做出反应,并下达相应的输出控制信号,通过上述控制指令接收和发送的方式实现传递,并达到紧急停车效果。当进行定位停车时,需要对刹车的精度进行控制,通过主轴的转速以及角度,对刹车角度的提前量进行计算,确保停车角的精度。针对紧急停车和定位停车两种控制方式,需要明确刹车滞后时间、角速度以及刹车角度滑移之间的关系,见公式(3)。

式中,θ为刹车角的滑移角预测数值,t为刹车滞后时间,n为当前汽车主轴运动的角速度,U为汽车主轴转速对调整角度产生的影响系数;θ0为需要调整的角度。根据公式(3)的计算,可以在发出控制指令时,将刹车滞后时间考虑到控制时间当中,确保对新能源汽车刹车控制的及时性,并实现对汽车刹车的主动控制。
3 对比实验
选择基于非线性干扰观测器的刹车控制系统作为对照组,将本文提出的控制系统作为实验组,将两种控制系统应用到相同的运行环境当中,针对运行效果进行对比。选择以某品牌两台新能源汽车作为实验对象,其中一台安装实验组控制系统,另一台安装对照组控制系统,两台汽车规格、运行性能等完全相同。图2为安装实验组控制系统的汽车红外线发射器发射光线示意图。
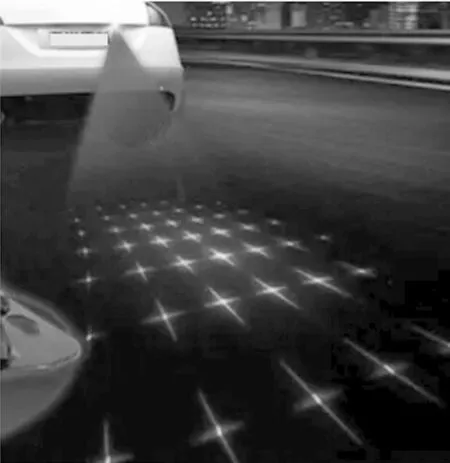
图2 实验组汽车红外发射器发射光线
在运行前,对两组汽车进行调试,控制汽车在相同的转速下,对比其刹车控制后停车时的角度精度,以此对控制系统的运行精度进行分析。在利用两种控制系统对车辆的刹车进行控制时,规定汽车的标准停车角为300°,在这一标准下,共完成6次车辆停车操作,记录刹车后车辆停车角的偏移量,见表1。
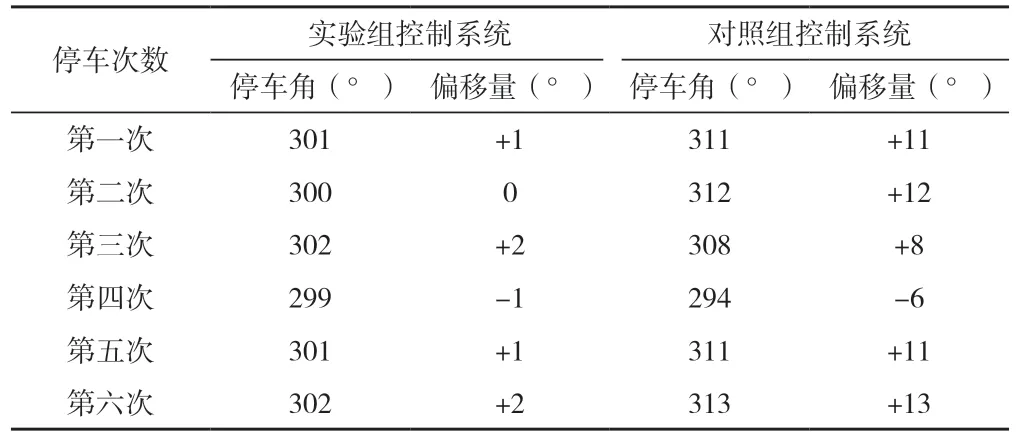
表1 实验组与对照组车辆停车角偏移量对比
通常情况下,新能源汽车在完成刹车动作后,其实际停车角与标准停车角的偏差在±5°以内,都认为符合正常刹车的标准。基于这一理论,结合表1中得到的实验结果可以看出,实验组控制系统的实际停车角与标准停车角之间产生的偏移量均在±5°以内,而对照组控制系统实际停车角与标准停车角之间产生的偏移量均超过了标准范围。因此,通过上述得出的实验结果能够初步证明,本文提出的基于红外感应的控制系统在实际应用中能够实现对新能源汽车主动刹车的高精度控制,对于提高新能源汽车的行驶安全具有极高的现实意义。
为了进一步对两种控制系统的灵敏度进行对比,选择将刹车信号产生时与障碍物之间的距离范围作为评价指标。二者之间的距离范围越大,说明控制系统的灵敏度越高,越能够及时给出刹车响应;反之,二者之间的距离范围越小,则说明控制系统的灵敏度越低,越无法及时给出刹车响应。为此,针对两台新能源汽车,对其在遇到不同障碍物时的刹车信号距离范围进行测量,结果见表2。
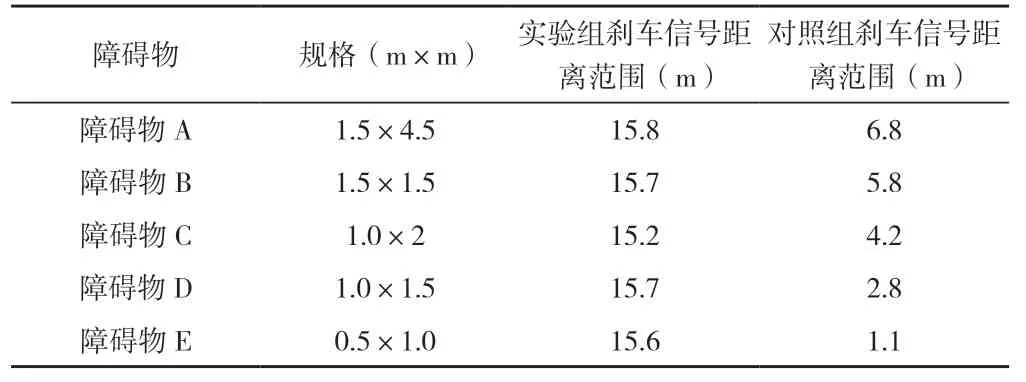
表2 实验组与对照组控制系统灵敏度对比
从表2中得出的实验结果可以看出,实验中组刹车信号距离范围均超过15m,并且不会随着障碍物规格的变化而发生改变,始终保持在安全距离范围内,而对照组刹车信号距离范围最大为6.8m,最小仅为1.1m,且会受到障碍物规格的影响。障碍物越小,则刹车信号距离范围越小,在对障碍物E进行刹车控制时,其距离范围仅为1.1m。在实际情况下对障碍物以及汽车都会造成一定损害。因此,本文提出的基于红外感应的控制系统在实际应用中具备更高的灵敏度。
综合上述两组实验结果得出,本文提出的控制系统在控制精度和控制灵敏度上均更加理想,以实现更及时和有效的刹车控制,从而确保新能源汽车的安全行驶,保障驾驶人员的人身安全。
4 结束语
为了提升新能源汽车行驶过程中的安全性,针对当前刹车不及时、疲劳驾驶、酒后驾车等造成汽车相撞频发的问题,引入红外感应技术,提出了一种全新的刹车控制系统,并通过实验的方式验证了这一系统的应用优势,可以在较大程度上降低甚至避免汽车相撞的问题。
