基于遥感智能控制的消防机器人
2022-11-03张薇薇孙长勇王学军初津宇郑明辉
张薇薇,孙长勇,王学军,初津宇,郑明辉
(山东华宇工学院,山东 德州 253034)
0 引 言
自燃火灾和生产生活火灾由于各种原因时长发生,其已经成为了一种常见的社会灾害。通常情况下,火灾所带来的损失往往是十分严重的,给公共安全带来很大威胁。随着我国经济水平和人民生活质量的不断提高,人们对消防安全提出了更高的要求。在这种形势下,加强消防建设势在必行。改革开放以来,中国进入市场经济时代。国民经济持续快速发展。为了响应我国经济体制朝着区块化,产业化和集中化方向发展的要求,我国石油化工,电力和仓储物流企业都开始进行集中化布局,但是这也加大了火灾的危害。消防机器人的问世能够在一定范围内代替消防员开展火灾救援工作,既能保障消防员人身安全又能有效降低消防员人员伤亡。目前,消防机器人已经逐渐成为了消防工作中不可或缺的重要工具之一。它是一种集机械、电子以及信息技术等多学科技术于一体的高科技产物,其功能非常强大。而且操作简单方便。同时,应用消防机器人还能提升灭火效率与灭火质量。将消防机器人应用于灭火救援工作中,可以很大程度地提高灭火工作效率,抢得灭火时间并遏制火势蔓延,从而为消防员生命安全和财产安全提供有力保障。消防人员要想在地面上完成入火,灭火和出火都需要大量的人力和物力,大型消防机器人通过在太空中完成设备组装可以打破火灾规模的局限性,并且可以节省成本。随着科技的发展和社会经济的进步,对消防安全要求越来越高。传统的人工操作方式已经不能满足现代消防工作的需求了。因此,自动化程度越高的消防系统就越有优势。如何以低成本和高效率的方式使用消防机器人来执行一系列复杂灭火任务已经成为当前消防技术领域关注的焦点。同时,消防机器人的操控方法将成为消防技术领域的关键。
1 研究现状
1.1 国内研究现状
国内科研机构及企事业单位开发的遥操作消防机器人在移动机器人平台,遥操作控制器及搭载传感器方面不尽相同,较少进入消防人员实用阶段,目前相关技术水平与国际发达国家能力相比还存在相当大的距离,各方面性能还有待提高。
1.2 国外研究现状
国际消防机器人研究可以划分为3 个阶段(3 代),第1 代程序控制消防机器人、第2 代感觉功能消防机器人、第3 代智能化消防机器人。随着计算机技术、通信技术和控制技术等高新技术在消防领域中应用程度的提高以及消防工作日益复杂,火灾探测与报警系统已从最初的机械式向数字化发展。这就要求消防机器人具备更高的性能。当前,各工业发达国家都在加速研制功能各异的实用型第二代消防机器人及第三代低级智能化消防机器人等,并开始了第三代高级智能机器人的研制。国外在该领域上实现的功能较为强大。
2 关键技术
消防机器人在执行消防任务时,涉及到许多关键技术。首先,该装置的组成为以下内容:
该装置是由梯形固定履带行走机构、水雾炮兼用装置、干粉炮、干冰炮、远程遥感操控器、智能降温喷雾装置、激光雷达避障装置、摄像头、前后车灯、回转台、气体在线检测仪、干冰灭火弹填装管、高压水管等装置组成。图1为消防机器人设计结构简图。

图1 消防机器人设计结构简图
对于消防机器人,一般需要经历以下的部分阶段或全部阶段:整个系统分为两部分,人机互动界面和前方车体。当前方车体到达指定部位后,操作员通过操控面板将控制指令输入传导给遥感系统的MCU,遥感系统通过数传模块传导给前方车体的数传模块,由数传模块传导给前方车体的MCU。前方车体收到指令后,向操作员指定的位置前进。当进入火场后,摄像头进行视频信息采集,通过车体内部的图传模块回传给操控面板的图传模块,从而使操作员能得到火场内部的情况。通过遥感系统将前方车体操控到火源附近。通过气体在线检测仪检测气体成分,选择合适的灭火方式。操作员通过控制面板将指令传导至MCU,再通过数传模块传至前方车体MCU,从而控制前方车体内部的云台电机控制、水雾炮电机控制、驱动电机控制、照明控制、蜂鸣器控制、温度传感器、气体传感器、超声波传感器、水压传感器、激光测距、电压检测、视频切换等控制,由车体内部的电源通电,通过直流电源保证前方车体有条不紊的进行灭火,达到系统的稳定性。具体流程如图2所示。
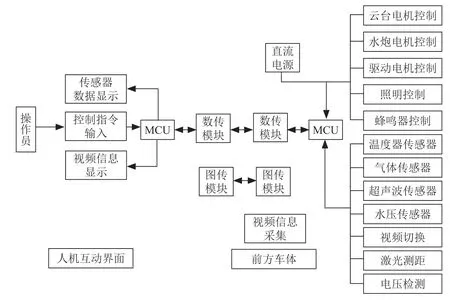
图2 设备工作流程图
2.1 控制面板技术
对于机器人的操控,控制面板的简洁非常重要。消防机器人的控制面板分为电源通信指示、语音控制、泡沫炮控制、干冰炮控制、车体控制、水雾炮切换控制、摄像机云台控制七个部分。对控制面板的各部分有明确的了解,才能更好的操控消防机器人。消防机器人控制面板如图3所示。
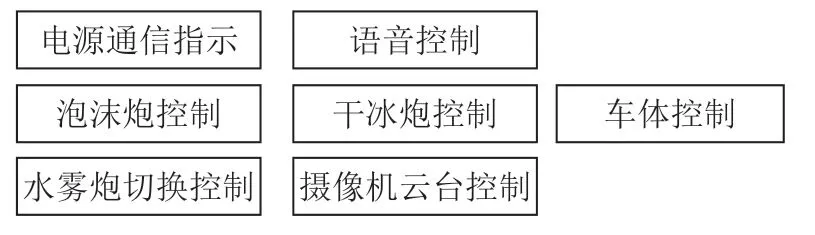
图3 消防机器人控制面板
2.2 控制方式技术
消防机器人控制通常采用无线遥控方式和有线控制两种方法。可实现两种控制方式的随意切换,使操控者更加的便捷。
无线遥控,能用车体内自带电源给它提供电能;交流电源与车体后线缆接头上连接,即可通过有线或无线或方式对机器人进行操纵。这种控制模式在一些特殊场合是可行的。无线遥控大多依靠上下位机间通信来实现。消防机器人系统控制方式如图4所示。

图4 消防机器人系统控制方式
在控制的全过程中上位机对消防机器人的实时运行状态,在无线视频装置的辅助下进行接收并在操控终端的画面中显示出来。通过上述方式,消防操作人员可以实时地观察机器人面临的作业环境以及当前的工作状况,并对其工作状态进行及时地调整,从而更好地执行工作任务。这样增加消防操作员使人与机器人各部件形成闭环操作系统。从整体上看,下位机既承担着对上位机所传递命令的接收,处理任务,又承担着对现场信息反馈并精确地带动相应动作机构动作的任务。如果下位机发生故障,则会直接影响上位机对现场情况的处理能力。一旦出现问题,就可能造成火灾或设备损坏等后果。因此,下位机在控制系统中处于重要的地位,起着决定性作用。系统总体闭环反馈控制方框图如图5所示。
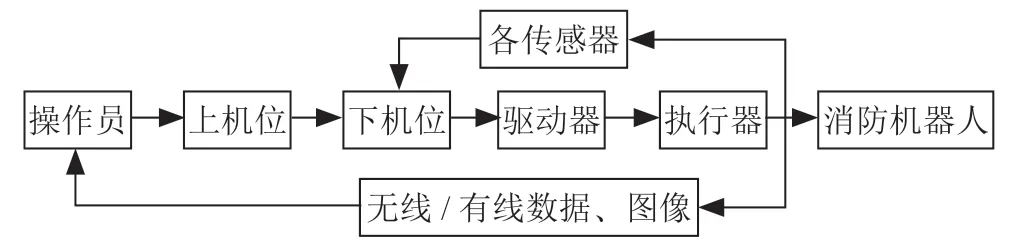
图5 消防机器人控制方框图
2.3 程序控制技术
基于遥感智能控制的消防机器人的程序分为三个阶段:程序段1 为除尘故障汇总、程序段2 为除尘控制、程序段3为斗轮机堆料运行状态-T0 干雾除尘。每个程序都控制着不同的部位进行操控,互不影响。采用分布式、模块化的结构来搭建消防机器人控制系统的方案,分析研究消防机器人的整体架构及其组成。图6是程序的具体内容。
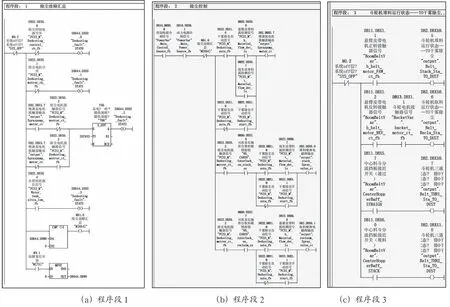
图6 消防机器人程序具体内容
2.4 实物展示
装置最终实物图如图7所示。
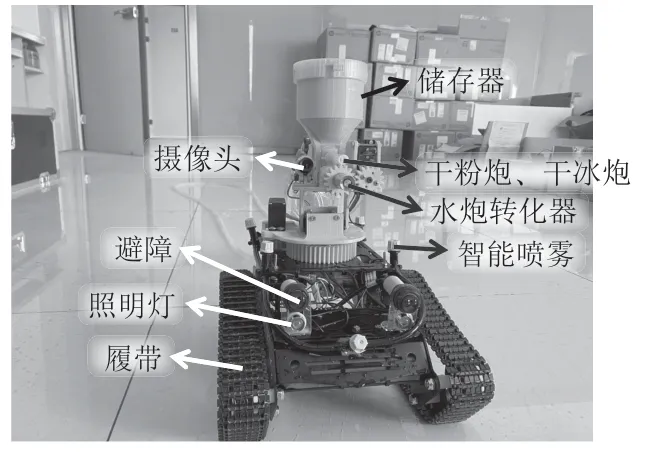
图7 实物图
3 结 论
本论文通过对国内外消防机器人的相关技术综合检索与收集,通过较详细的研究与归纳,针对消防救援人员处于易燃,易爆,有毒,浓烟及易坍塌建筑物危险环境下的侦察与灭火冷却操作,通过遥感智能控制消防机器人来解决消防救援人员对以上环境下信息获取量不足及面临人身安全问题。该系统能够有效地完成对各种危险源的探测与定位,并能及时准确地将所发现的火情信号传送给指挥员或指挥中心;同时也为消防员提供实时监测平台。采用消防机器人可以降低消防人员伤亡及国家财产损失,增强消防部门对恶性火灾的扑救及救援能力。因此,对消防机器人进行研究与开发,具有实际意义与价值。
消防机器人属于特种机器人,不管机器人技术如何发展,一定要从灭火救援实际情况出发,适应消防部队灭火救援特定的现实需求,深入挖掘消防机器人的实战应用潜能,不断增强消防部队扑灭火灾和抢获重大灾害的本领。随着社会经济和科学技术的迅猛发展,人们对火灾预防与控制的认识也越来越深刻。目前,我国正处于城市化建设高速发展期,城市规模不断扩大,人口急剧增加。这给消防安全带来了前所未有的压力。近期内消防人员应进行消防机器人知识训练,争取早日完成对消防机器人的普及,使我国的消防安全显著提高。
