地铁调度命令列车运行路径自动生成研究
2022-11-03邓纯净
邓纯净
(佛山市轨道交通发展有限公司,广东 佛山 528000)
0 引 言
调度命令是地铁运营组织的重要凭证,分为口头和书面调度命令两种形式。口头调度命令主要用于运营生产过程中因特殊原因需要进行临时或局部运营调整的情况,书面调度命令主要用于对线路24 小时及以上限速或取消限速、施工需要加开工程列车或调试列车、封锁、开通线路以及其他特殊情况。
地铁行车调度维修施工中的调度命令一般是以书面命令的形式下发给车辆段信号楼值班员排列列车出厂进路,乘务驾驶列车,车站监控列车运行使用,施工负责人组织现场施工使用,是地铁行车设备施工的重要因素,也是保障施工工程车或者调试列车安全作业的重要凭证。目前地铁行业内,施工书面调度命令均是由一名行车调度拟写,搭档行车调度进行审核,再发送到值班主任进行审核,审核通过后流转到拟写调度命令的行车调度处进行下发执行(详细业务流程见图1),全程均是人工根据施工作业需求进行拟写及审核,再以邮件或者其他形式进行发布。

图1 施工书面调度命令发布业务流程
1 研究现状
目前已有学者及研究人员对调度命令的信息化流程进行研究,陈文等通过以北京地铁1 号线为试点,分析地铁的调度命令作业流程,抽象核心逻辑,对整个业务过程进行建模,研发了一套面向地铁的调度命令电子化系统,实现对调度命令的收发管理、调度命令的显示管理、长期调度命令的管理、调度命令存储管理和调度命令的打印管理等。西南交通大学廖静在其硕士论文《面向地铁的调度命令管理系统》中对目前地铁调度命令的发布不足进行分析,以“北京地铁1 号线调度命令管理”项目为依托,设计并开发了面向地铁的调度命令管理系统,实现书面命令的快速编辑、准确发布、高效查询和更安全的保存。呼和浩特铁路局信息技术所刘鹿提出设计铁路局调度命令系统,从命令流转、功能设计、开发工具等方面解决传统铁路调度方式存在耗时多、难以统计的困难。通过分析目前国内对调度命令信息技术应用研究现状,发现大部分地铁公司对调度命令的审核、查询、发布、管理等流程进行电子化,即用信息化系统代替常规的电子邮件或其他方式,但是还是需要人工对调度命令的内容进行编写与发布,这样虽然减少了各项流程的耗时、提高了效率和规范化了管理,但是对于调度命令内容的可靠性和正确性并没有提高。
由于调度命令内容为人工进行拟写,存在大量的人工审核工作,以及人的不稳定因素,导致实际运作过程中存在命令内容和施工作业计划不匹配、列车运行路径不正确、地点不匹配,或者列车运行车次错误等失误的情况出现,对现场工程车运行或车站运作带来不安全因素。彭其渊,胡雨欣,鲁工圆在《基于预警文本信息的调度命令智能生成模型》文中,通过对铁路日常和应急调度命令的拟写过程进行分析,建立了由神经网络和调度命令修正模块两部分组成调度命令智能生成模型,自动生成应急调度命令。受彭其渊等的启发,研究利用计算机技术,实现地铁行车调度维修施工调度命令自动生成,根据日常的施工计划要求,自动生成调度命令,减少人工介入,释放技术力量,即提高了调度名利的正确性及可靠性,同时将技术力量用于施工组织等方面,保障夜间施工的有序与安全性。
2 难点分析
地铁行车调度维修施工调度命令分为加开、封锁以及解封命令,加开书面调度命令是工程车运行、车厂值班员、车站及调度组织列车运行的重要凭证,需要包含工程车所需要配合的作业、出回厂走行路径、运行凭证、待令地点,具体内容如表1所示。

表1 某地铁公司加开书面命令内容
利用信息技术实现施工调度命令自动生成时,需要解决两个方面的难点,一是通过施工作业计划提取书面调度命令的内容要素,二是解决路径问题。目前国内地铁行业有严格的施工计划管理机制,对施工计划的内容进行系统的规定,包含了请销点、出厂地点、回厂地点、作业区域以及作业内容等要素,如图2所示,在自动生成调度命令时将施工计划中相关要素进行提取即可;对于自动生成命令列车运行路径生成的难点,目前均是通过人工经验进行梳理,这一方式比较便捷,但存在路径局限性,本案例借助于人工智能算法——蚁群算法,对列车运行的最优路径和有效路径进行搜索,为调度命令生成提供多重路径选择。

图2 某地铁施工计划要素
3 解决方案
3.1 构造点边矩阵
利用蚁群算法解决调度命令中路径选择问题,首先需要对线路图转化为“点—边”图。转化原则是每个站点上下行各为一个点,每一条存车线为一个点,出入厂线分别为一个点,相邻的点以顺序为原则进行连接。图3为某地铁线路示意图,其转换为“点—边”图如图4所示。

图3 线路示意图

图4 点—边图
3.2 建立蚁群算法模型
蚁群算法(Ant Algorithm,AA)又称蚁群优化算法(Ant Colony Optimization,ACO),是由意大利学者M.Dorigo 于1991年模拟蚂蚁种群外出觅食行为提出的仿生算法。蚁群优化算法是一种群集智能算法,是模拟蚂蚁觅食的原理设计出的。蚂蚁在觅食过程中能够在其经过的路径上留下一种称之为信息素的物质,并在觅食过程中能够感知这种物质的强度,并指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象。某条路径越短,路径上经过的蚂蚁越多,其信息素遗留的也就越多,信息素的浓度也就越高,蚂蚁选择这条路径的概率也就越高,由此构成的正反馈过程,从而逐渐地逼近最优路径,找到最优路径,式(1)—(4)为普通蚁群算法模型。


在本案例中,由于蚂蚁的起点是固定的,即出厂线或入场线,而终点是线路上的任何点,所以在蚂蚁搜寻食物过程中不需要搜寻所有的点,故本案例中引入有效路径模型,减少蚂蚁搜寻长度,加速迭代,避免蚂蚁走太多的回头路,如图4中,若需到,虽然蚂蚁由→→也能到达,但是在实际运用中永远不会用到这条路径,故为无效路径,具体模型如式(5):

式中:len(c)——第只蚂蚁所走的点的长度;a为蚂蚁需要到达的终点;|a-|为蚂蚁需要到达的终点与起点的差距;∑为线路终点至与起点的差距。
3.3 算法流程
基于普通蚁群算法的原理分析以及本案例对于有效路径的特殊,在普通蚁群算法的基础上增加对有效点数模型的匹配,从而减少在非有效路径上的计算资源,提高搜寻的有效性,具体算法流程如图5所示。

图5 有效路径蚁群算法求解流程
3.4 仿真实验
本文采用C#通过对普通蚁群算法和加入有效路径后的蚁群算法对列车运行路径进行仿真实验,图6为普通蚁群算法,图7为加入有效路径后的蚁群算法求解。其中以点到为列,蚂蚁数量为20 只,最大迭代数均取20,信息启发因子=1,距离启发因子=2,信息蒸发系数=0.5。通过对比发现普通蚁群算法(图6)在搜索过程中多次出现局部最优解的情况,且在收敛过程中不稳定,迭代至30 代后才收敛;通过对比发现,加入有效路径后的蚁群算法(图7)与普通蚁群算法(图6)最大的优势在于收敛代数(第17 代),在收敛过程中存在很小的局部收敛情况。
图6 普通蚁群算法C#仿真结果
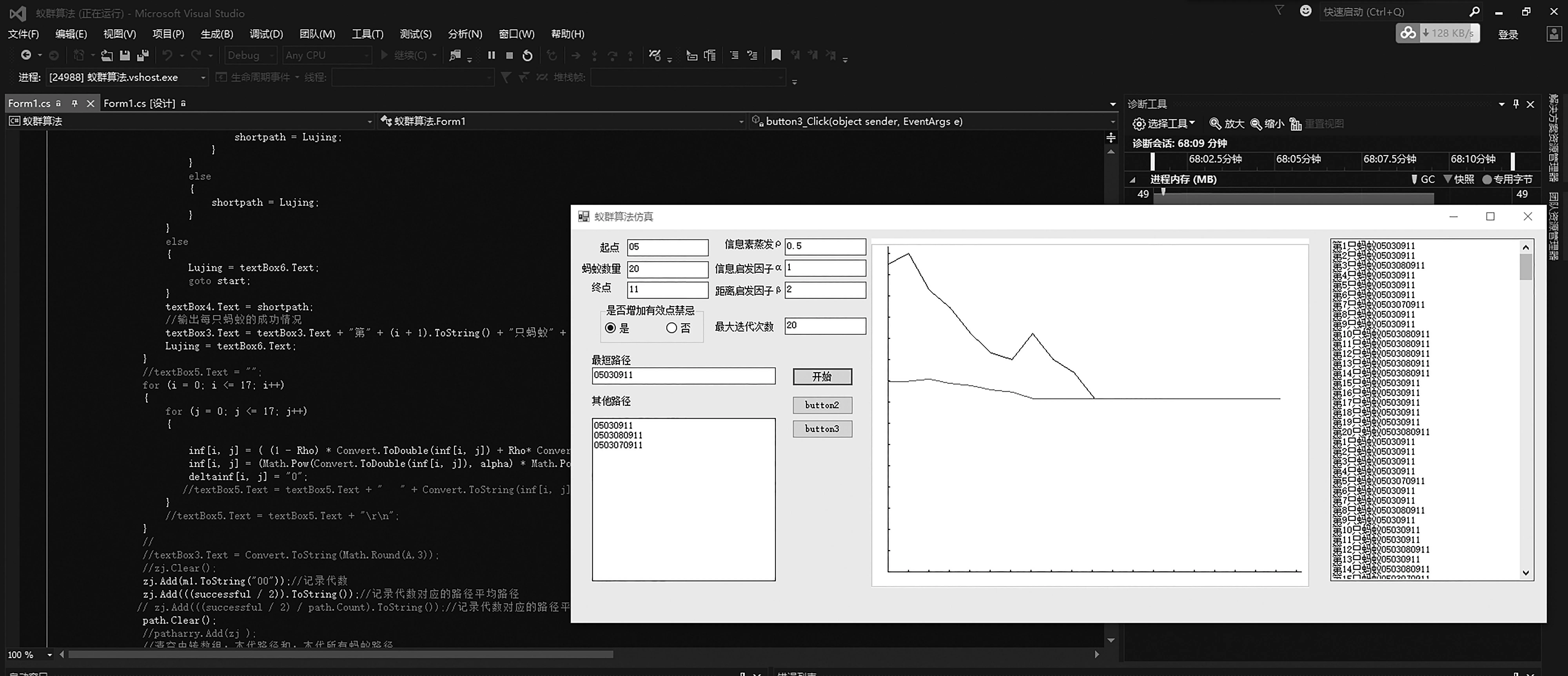
图7 加入有效路径后的蚁群算法C#仿真结果
由于行车路径是行车调度组织列车在正线运行的重要因素,故在利用蚁群算法解决路径问题时除了获取最小路径外,还需要将有效路径搜索出来供调度员选择。图6与图7是分别仿真了两种算法有效路径的结果,通过对比发现普通蚁群算法输出了较多的无效路径,即“回头路”,而加入有效路径模型后,大大减少无效路径的输出。
4 结 论
蚁群算法作为解决路径规划的常用智能优化算法,在各领域均得到非常普遍的运用。本文通过结合调度员在日常行车组织中的特殊情况,引入有效路径模型,对普通蚁群算法求解过程进行优化,最后利用C#对两种算法进行模拟仿真,通过对比发现加入有效路径后算法的收敛代数较普通算法更快,在搜索路径时能有效避开无效路径,最终为调度员的行车组织提供其他有效路径的选择,最终解决调度命令自动生成出(回)厂路径的难点。
