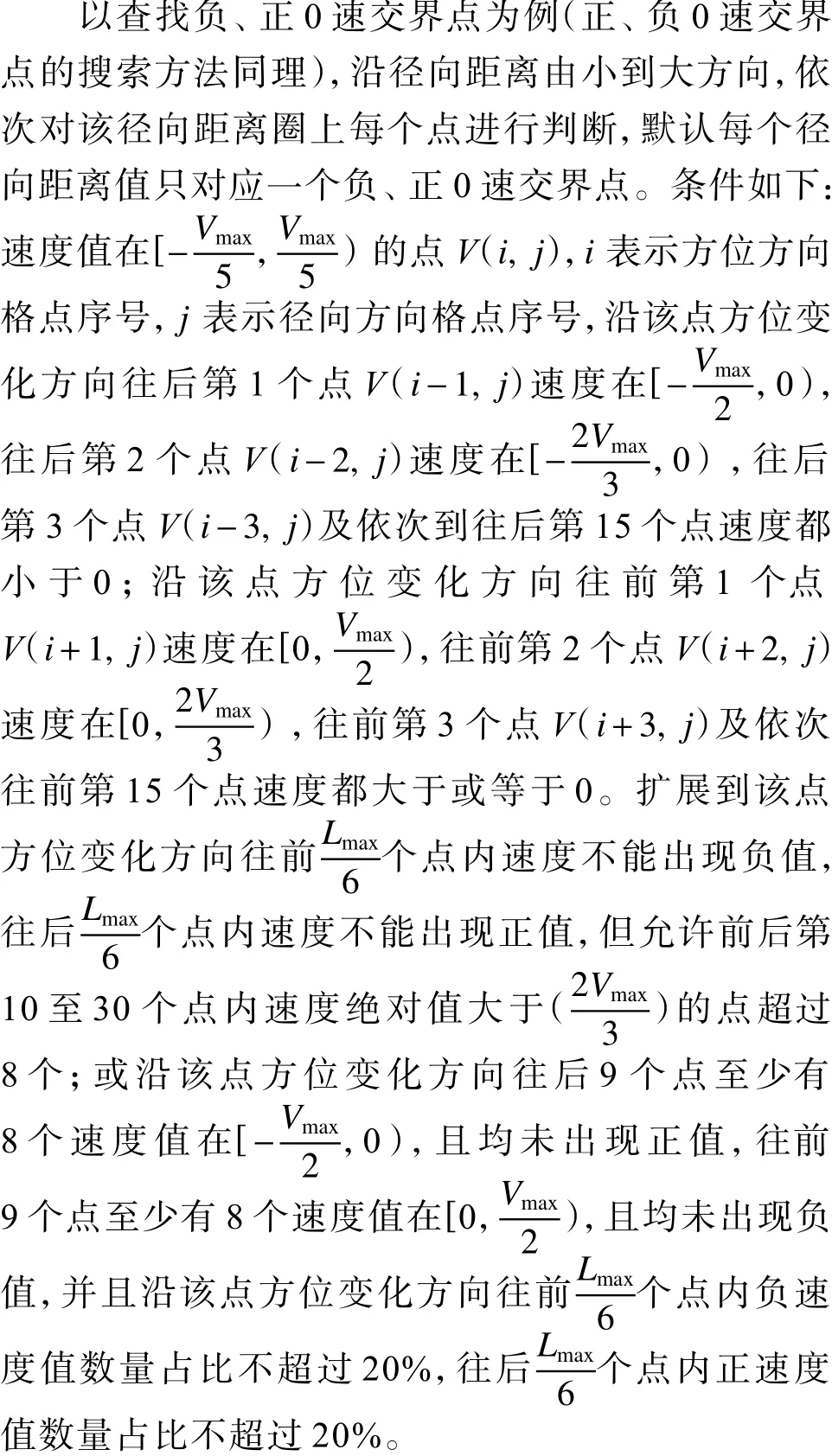
适用S波段多普勒天气雷达的径向速度自动退模糊方法*
2022-11-02韩颂雨刘永生罗昌荣
韩颂雨 刘永生 骆 阳 杨 明 罗昌荣
1.浙江省气象信息网络中心,杭州,310001
2.海峡气象开放实验室,厦门,361012
1 引言
多普勒天气雷达的径向速度广泛用于天气监测分析(郑媛媛等,2004;王丽荣等,2007;俞小鼎等,2012)、风场反演(刘黎平等,2003;罗昌荣等,2012;王子昕等,2022)以及模式资料同化(杨毅等2008;陈锋等,2020)等,但速度模糊问题使该资料应用受到一定限制。
雷达通过测量相邻脉冲间的相位变化提取径向速度,最大探测速度与雷达波长、脉冲重复频率(PRF,Pulse Repetition Frequency)成正比,最大探测距离与脉冲重复频率成反比。同一部雷达同一个脉冲重复频率,为保证较大的最大探测距离,其最大探测速度就要缩小,因二者的上述关系,业务上S波段天气雷达最大探测速度范围局限在约-27—27 m/s,超出最大探测速度的速度会折叠在该范围内,由此产生错误的模糊速度。模糊速度与真实速度之间存在一定关系(真实速度等于模糊速度加减偶数倍的最大不模糊速度),为纠正模糊值,解析真实速度,退模糊速度是重要的技术难题。
双脉冲重复频率或多脉冲重复频率的硬件方法(Sirmans,et al,1976;潘新民等,2010)可扩展最大探测速度,避免出现速度模糊,但会导致雷达探测数据质量下降(May,2001;杨川等,2012;肖艳姣等,2016),且遇到台风、强对流等天气依然会出现速度模糊,因此出现了退模糊的软件算法。模糊速度表现为最大速度值跃变,大多退模糊算法基于径向速度在空间和时间上的连续:从沿径向或方位的一维退模糊(Ray,et al,1977;刘淑媛等,2004)、二维退模糊(Bergen,et al,1988;Jing,et al,1993;梁海河等,2002)一直到沿径向、方位、仰角(Louf,et al,2020)和时间序列的四维退模糊(James,et al,2001)。
退模糊的关键是确定可靠的观测参考值,主要通过3种方式:一是借助雷达以外的资料:如用探空环境风(Eilts,et al,1990)或快速更新系统的三维风场(Lim,et al,2010;童文雪等,2013)作为参考速度,但这些资料时、空分辨率较低,对小尺度系统不具代表性。二是使用速度-方位显示(VAD,Velocity Azimuth Display)风场作为参考速度(Gong,et al,2003;张 少 波 等,2007;Xu,et al,2011),但VAD风场只提供雷达附近多个高度的平均风场,且算法本身受速度模糊及有效速度资料覆盖率影响。Xu等(2013a)基于变分方法改进了VAD方法,并进行了优化(Xu,et al,2013b),但对远离雷达的孤立风暴作用仍有限。Jiang等(2016)针对台风基于精调涡旋分析改进了Xu等(2013a)的退模糊方法。三是通过雷达自身径向速度特点挖掘可靠的起始参考值,由于雷达的高时、空分辨率,这种方式较前两种更有效。Zhang等(2006)通过搜寻最弱风区确定一组退模糊的初始参考径向和速度库,基于连续性进行2次顺时针和逆时针180°的退模糊,解决了初始模糊问题,应用效果很好(蔡亲波等,2009),但对孤立回波和杂点干扰的模糊现象还会出现问题(仰美霖等,2011)。肖艳姣等(2012)针对孤立风暴、强台风等复杂情况,改进了Zhang等(2006)方法,搜索最弱风区的初始参考径向考虑了相邻仰角,并保留两组初始参考径向,对强风切检查进行第二次退模糊。杨明等(2013)也针对孤立风暴的速度模糊情况,改进了Zhang等(2006)方法,基于连续性搜索模糊边界和模糊区域,并采用扩展邻域法进行模糊订正。楚志刚等(2013)针对噪声背景下速度模糊问题,釆用分离恢复噪声抑制方法,有效解决退模糊的杂点干扰问题。He等(2012,2019a,2019b)和Li等(2014)建立了较为系统的退模糊方法:包括去除噪声数据,确定初始径向,保留对流区域,径向、方位向多次退模糊,错误检查等,但在特定情况仍需人工辅助。Yuan等(2020)在获得可靠参考速度径向后基于区域速度差总和最小化的思路退模糊。
以上方法的首要步骤是寻找最弱风区确定可靠的初始参考速度径向,但0速线形状千变万化,可能存在剧烈弯曲,也可能受距离折叠影响,仅以最弱风区的径向直线作为起始参考,存在一些不确定风险。李南(2011)利用类似“走迷宫”的算法找到2条0速线用于区分正、负速度区,用符号是否一致来校正模糊,但这对一次模糊转向及实际复杂风场无效,仍需依靠人机交互完成退模糊。陈宏波等(2015)通过分段寻找弱风区确切位置以确定0速曲线对模拟资料进行退模糊测试。
以往研究退模糊的主要思路是:以初始未模糊的速度作为可靠参考,依据空间连续原则进行参考速度的扩展判断。此思路存在几个问题:①回波边缘出现模糊,如孤立的以及受距离折叠隔离的强风回波区出现模糊的情况无法用连续性判断;②模糊区域受到杂点影响时如何避免其干扰;③仅以最弱风区确定的径向直线作为起始参考存在一定风险。
针对以上问题,本研究设计了一种适应多种天气事件的径向速度自动退模糊方法,并利用S波段雷达3407个体扫资料对该算法进行了验证,同时与业务退模糊方法结果进行对比,以期探寻提高雷达径向速度资料质量和应用价值的方法。
2 算法及关键技术
文中试验数据为S波段雷达,最大不模糊速度(Vmax,即最大探测速度)约30 m/s,总径向根数(Lmax)约360根,雷达速度数据的最大距离库(R)约920,默认为弱速度区,20 m/s可能性较大。所有阈值设计均按上述雷达探测参以上为速度大值区,因其附近出现模糊的数设定。
算法的流程见图1,由读取雷达体扫基数据开始,从高仰角向低仰角(因高仰角层较低仰角层可更好地确定0速线)依次对每层速度进行处理,最后仅将经退模糊处理过的径向数据点修改到原体扫数据中。
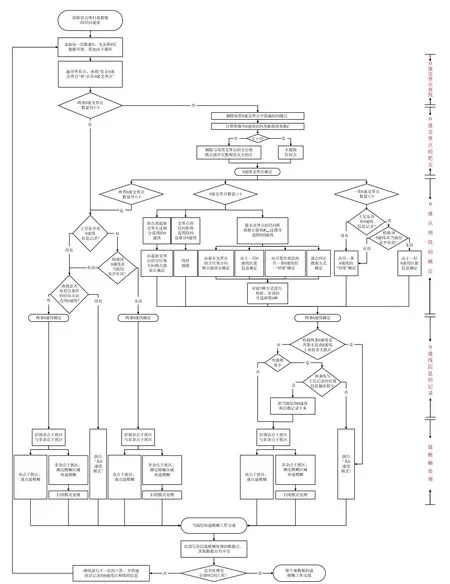
图1 退速度模糊算法处理流程Fig.1 Overall processing flow chart of the velocity dealiasing algorithm
2.1 0速交界点查找
查找负、正0速交界点和正、负0速交界点,即沿方位顺时针方向由弱速度负值变化到正值的交界点和由弱速度正值变化到负值的交界点。
0速交界点的弱速度变化特征可自行拟定,只需确保筛选到有益于确定0速线的交界点。如图2a及文中相关图中出现的零星蓝、黄点所示,蓝点表示负、正0速交界点,黄点表示正、负0速交界点。

图2 根据0速线弯曲程度参数筛选参与插值的0速交界点(2014年7月27日09时03分(世界时,下同)宁波雷达9.9°仰角观测到的飑线过程径向速度场:a.退模糊前(蓝、黄点表示查找到的0速交界点),b.退模糊后(蓝、黄线表示确定的0速线);下同)Fig.2 The fitting zero velocity junction points are selected according to the bending degree parameter of the zero velocity line(radial velocity field of squall line observed by Ningbo radar at 9.9°elevation at 09:03 UTC 27 July 2014:a.before dealiasing (the blue and yellow dots represent the zero velocity junction),b.after dealiasing(the blue and yellow lines represent the determined zero velocity line);hereafter the same)
2.2 0速交界点把关
对查找到的两类0速交界点,首先筛选孤偏问题点:对每个0速交界点与其余所有点逐个进行判断,是否两点间距离小于一定阈值,如果均不符合该条件,说明该点较为孤偏,没有一个点与其相近,不可信,将其剔除。然后评估图像中拟需确定的0速线其潜在弯曲程度以决策是否做进一步剔除:检查所有速度点,若该点径向方向向外(内)0.2R个格点都是负速度向内(外)0.2R个格点都是正速度则计数累加1次最终得到参数C,这样的点多说明0速线沿方位变化方向的弯曲程度大;若累加次数≥0.04Lmax,说明0速线存在弯曲,不需剔除任何点;否则,说明0速线不存在明显弯曲,剔除0速交界点中与全部数据点方位值中位数相差大于0.15Lmax的点,即与整体趋势相差较大的点。
如图2所示,计算的0速线切向弯曲程度参数(C)较大(大于阈值),说明0速线存在弯曲,无需进一步筛选正、负0速交界点(黄点),即可将图2a中所有正、负0速交界点插值成图2b的正、负0速线(黄线)。
2.3 0速点到线的确定
根据处理后的两类0速交界点信息,通过插值方式得到负、正0速线和正、负0速线,文中的0速线是整体图像中正、负速度分区大趋势的0速线,并不是雷达径向观测的所有0速线。
由负、正0速交界点插值得到图像中整体大趋势的负、正0速线(图2b蓝线),正、负0速交界点插值得到正、负0速线(图2b黄线)。譬如,已确定的0速交界点径向距离格点依次为[80 85 100···150 390 490 700],方 位 格 点 依 次 为[40 45 60···55 48 78 76]。径向距离格点为81,则方位格点值由邻近的80、85两点线性插值确定,为插值结果如出现在大速度值上的点,可参考逐点纠正搜索方式,局部搜索弱的正(负)、负(正)速度值交界处。
径向距离值1—80的方位值由第一个已知0速交界点的方位值确定,即为40。700—Rmax的方位值(Rmax为当前仰角层有效速度数据的最大径向距离,下同)可选择以下4种方式确定:(1)由最末已知0速交界点的方位值延长确定,即均为76。(2)由记录的上一层0速线信息确定。(3)由可靠性更高的另一条0速线信息确定(简称对线)。一般情况下,两条0速线基本互补,将图像大致分成一半。如需确定的是负、正0速度线,由0速交界点更多的正、负0速线方位格点中位数加180来确定。(4)利用逐点纠正搜索方式确定。
经试验发现,查找到的0速交界点在靠近雷达中心区域分布较多,其他区域较少,因此0速线的起始端确定比较简单,用第一个已知0速交界点的方位格点值即可,而0速线的末端确定较为复杂,要根据不同情况选择最佳方式,若方式(1)—(3)确定的0速线上点落在较大的速度绝对值附近,则选用方式(4)。
2.3.1 逐点纠正搜索方式
如图3所示,如按最末已知0速交界点的方位值延长确定0速线末端(图3a1、b1箭头方向),则该0速线均落在速度绝对值大值区,经检验该方式有误,因此使用逐点纠正搜索方式来确定0速线末端,逐点搜索弱速度值所在方位。该方式搜索确定的0速线准确,据此成功退除了模糊区域(图3a2、b2)。
2.3.2 检验上层0速线位置在当前层是否有误
上层两条0速线位置信息在当前层位置的每个点(最接近的点),沿着它的方位变化方向局部范围内是否有速度大值点出现,若该情况的0速线点数量较多,则有误,说明上层0速线落在该层速度绝对值较大位置,上层0速线信息不可用。如果出现该情况的点数量较少,说明有一定参考性。同理检验上层0速线在当前层0速线末端是否有误、检验最末已知0速交界点方位值延长确定的0速线末端是否有误、检验对线确定的0速线末端是否有误。
如图3b所示,正、负0速线(黄线)末端利用对线信息,但经检验其落在大值区,有误;利用上层0速线位置信息,也落在大值区,有误;再利用最末已知交界点的方位值延长线信息,检验也有误;最后利用逐点纠正搜索方式确定0速线末端。该过程经多次检验以确保0速线的准确。
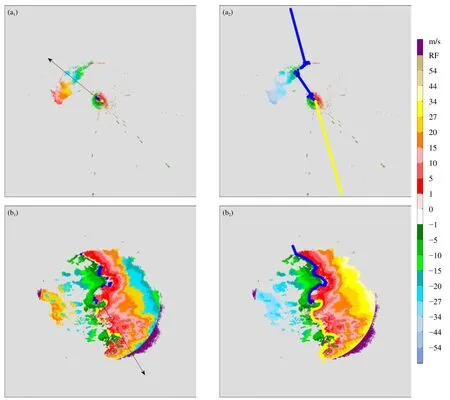
图3 逐点纠正搜索方式确定0速线末端示意(2020年3月21日08时宁波雷达4.3°仰角退模糊前(a1)、后(a2),09时44分湖州雷达3.4°仰角退模糊前(b1)、后(b2)径向速度场;箭头表示按最末已知0速交界点的方位值延长确定0速线末端)Fig.3 The end part of zero velocity line determined by point by point correction search method (a.radial velocity field before(a1)and after(a2)dealiasing of Ningbo radar at 4.3°elevation at 08:00 UTC 21 March 2020;b.radial velocity field before(b1)and after(b2)dealiasing of Huzhou radar at 3.4°elevation at 09:44 UTC 21 March 2020;the arrow indicates that the end part of the zero velocity line is determined according to the extension of the azimuth grid value of the last known zero velocity junction point)
2.4 0速线信息记录
确定的0速线,若满足两条相距不太近(方位值中位数的差大于阈值)、弯曲程度较小,与上层记录的0速线位置偏差较小3个条件,则将当前仰角层确定的0速线信息记录下来,作为下层退模糊过程的参考。
2.5 退模糊处理
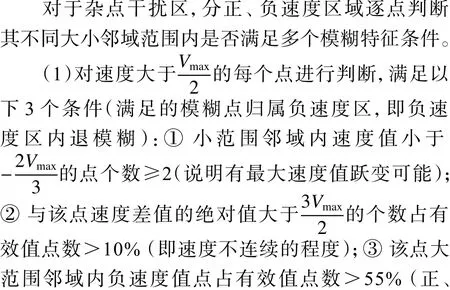
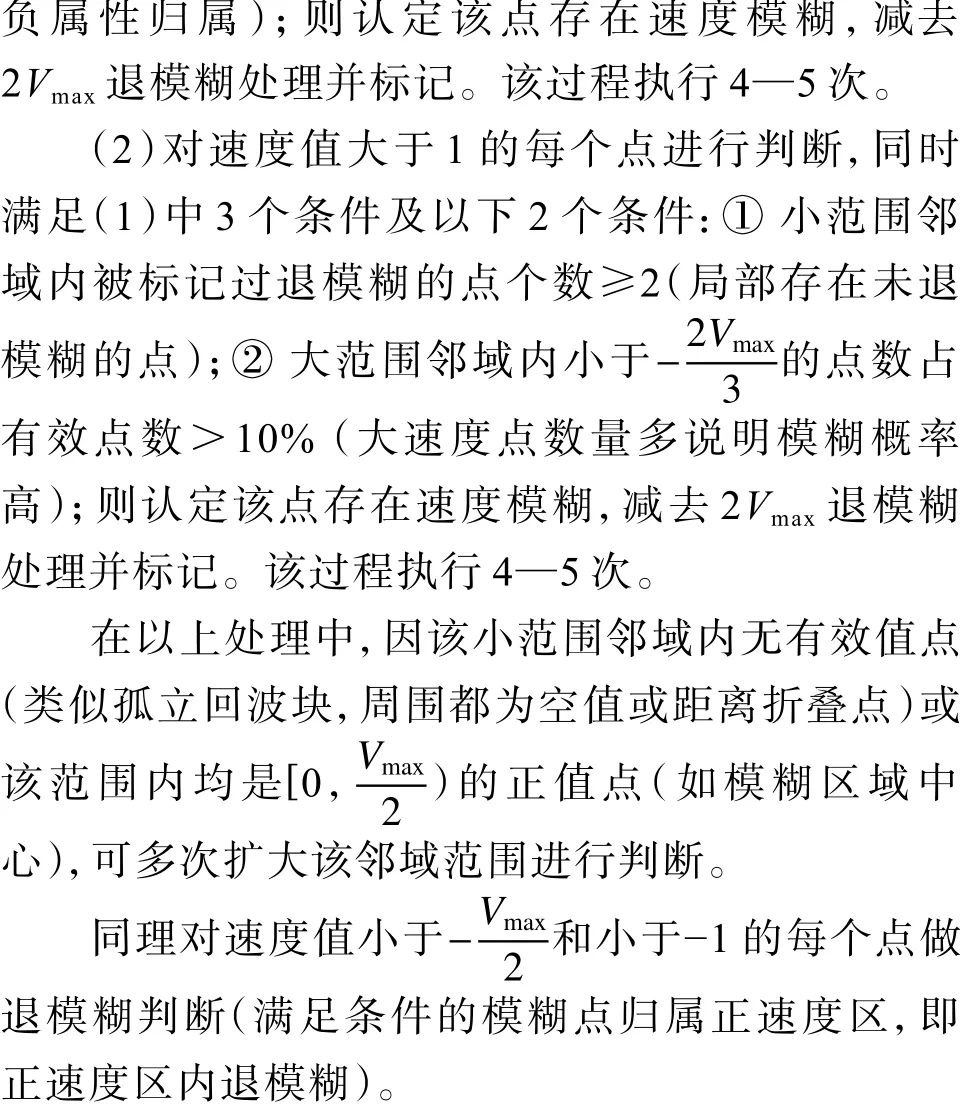
确定0速线后按如下步骤处理:(1)对径向距离划分的区域识别杂点干扰区与非杂点干扰区;(2)在杂点干扰区,分正、负速度区逐点判断其不同大小邻域范围内是否同时满足多个符合模糊特征的条件,对满足条件的点进行退模糊处理并标记;(3)在非杂点干扰区,沿径向与方位方向分别搜索满足条件的边界点以圈定模糊区域来退模糊并标记,对遗留未退去的模糊点用(2)中的方法进行处理并标记。
未能确定0速线按如下步骤处理:(1)未能查找到满足条件的0速交界点或确定的交界点数≤3,利用上层记录的0速线位置信息来确定当前两条0速线(需检验无误);若无上层0速线位置信息或上层信息检验有误,则搜索符合条件的径向直线方向的两条0速线;并按确定0速线步骤进行退模糊处理;(2)经(1)还未能确定0速线或确定的两条0速线相距太近(即方位值中位数差小于阈值)或0速线上存在较多速度大值区点或两条0速线与上层记录的对应0速线位置距离太远(即方位值中位数差大于阈值),执行无0速线模式,其与杂点干扰区及扫尾处理的退模糊方法类似,逐点判断其邻域范围内最大不模糊速度临界点的跃变、速度的不连续、正、负属性归属等多个模糊特征,且针对孤立回波与模糊中心区域其邻域范围内没有最大不模糊速度临界点的跃变情况,可多次扩展该邻域范围进行判断。
2.5.1 识别杂点干扰区
以雷达速度最大距离库R为920为例,分别计算[0,25)、[25,50)、[50,75)、[75,100)、[100,125)、[125,150)、[150,175)、[175,200)、[200,300)、[300,400)、[400,600)、[600,920)径向距离扇环内有效数据点中(如[R1,R2),即(R2-R1)Lmax个数据中的有效速度数据)杂点数占比。
计算以下两类杂点:孤立杂点,指该点一定范围内(如方位方向前、后2个点和径向方向前、后2个点)每点速度与该点速度差绝对值均大于15;低值杂点,指负速度区内值为[-1,5),正速度区内值为[-5,1)。如果该范围内孤立杂点或低值杂点占比大于阈值,则认定该范围为杂点干扰区。
2.5.2 杂点干扰区退模糊处理
2.5.3 非杂点干扰区的退模糊处理

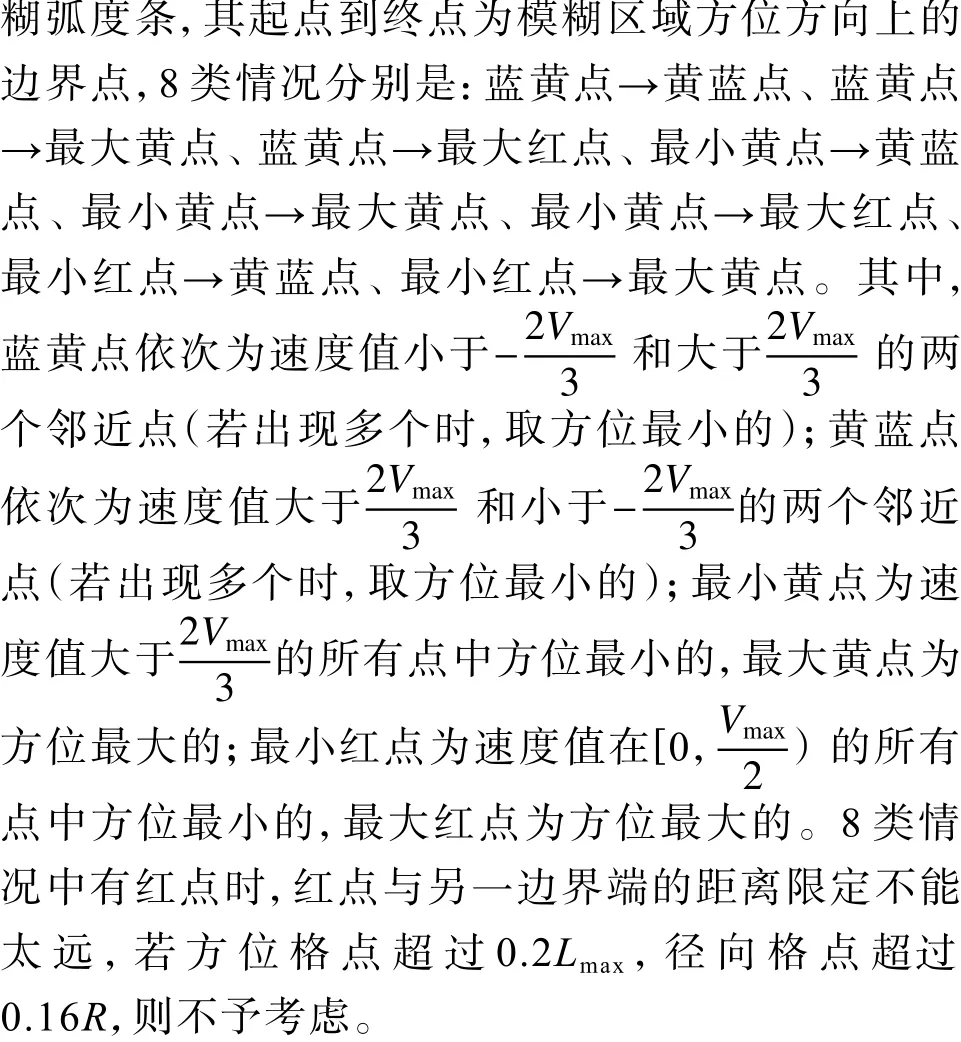
图4d中的粉色点为查找到的多个模糊弧度条的起点、终点。依照上述规则,沿径向距离方向(由雷达向外为正方向),查找模糊径向距离条(图4e)。
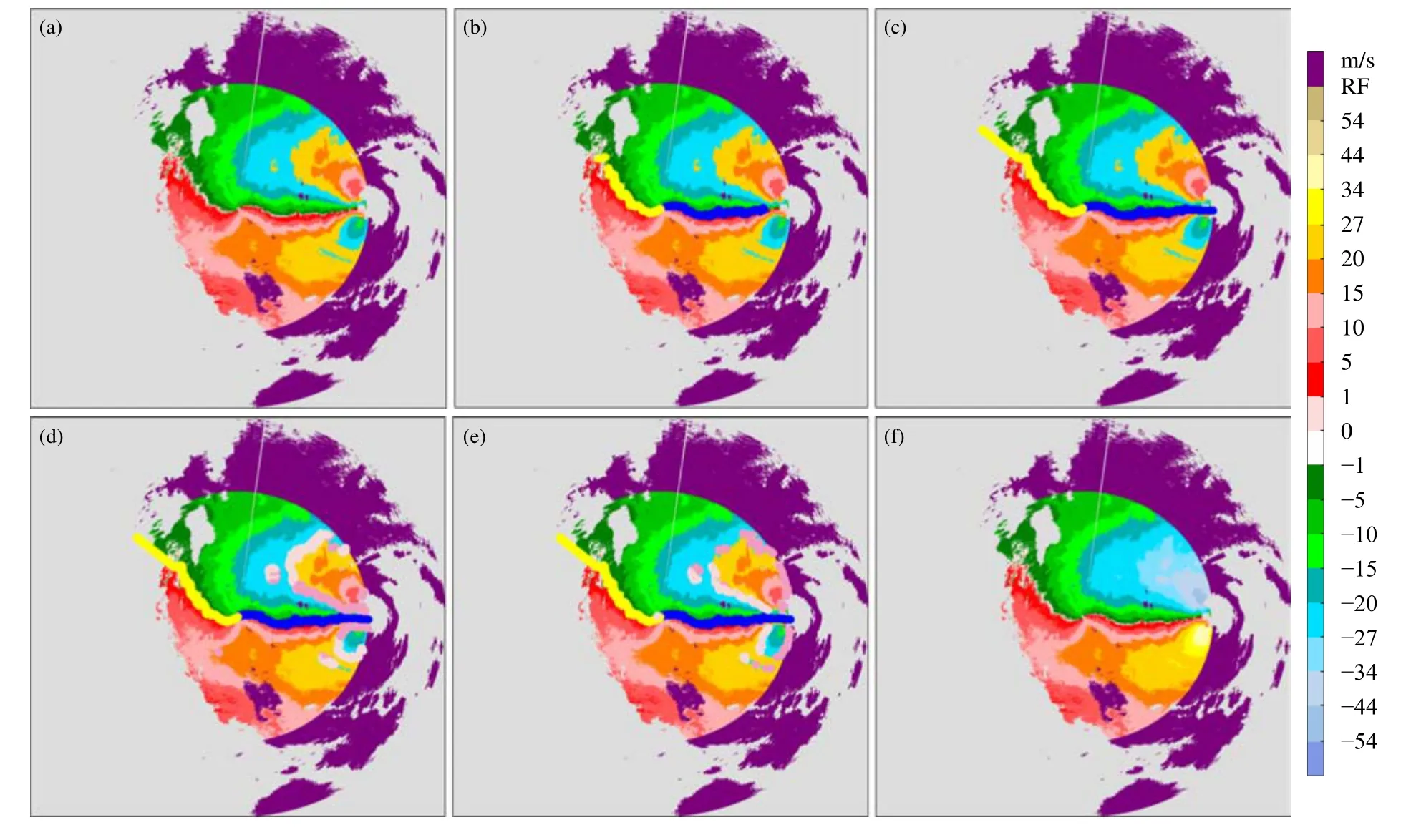
图4 寻找模糊区域边界点的退模糊流程示意(2016年9月14日14时漳州雷达1.5°仰角观测的“莫兰蒂”台风过程径向速度场:a.退模糊前,b.0速交界点,c.点变线,d.模糊弧度条,e.模糊径向距离条,f.退模糊后)Fig.4 Dealiasing process of finding boundary points in ambiguity area (radial velocity field before and after dealiasing observed by Zhangzhou radar at 1.5°elevation during typhoon"Meranti"at 14:00 UTC 14 September 2016:a.original drawing,b.find zero velocity junction point,c.determine the zone by point to line,d.ambiguity radian bar,e.ambiguity radial distance bar,f. after dealiasing)
在负(正)速度区,对搜索到的模糊弧度条和模糊径向距离条内所有速度正(负)值点进行退模糊处理,减去(加上)(2Vmax),并进行标记。处理过程执行2次。经查找模糊区域边界并退模糊处理后若仍遗留一些模糊点未完全去除,则利用杂点干扰区的退模糊方法进行扫尾处理。
对于一次模糊转向的严重速度模糊情况(以负速度区为例),则将上述8类情况中的红点改为的绿点,并确保该识别条内的绿点过渡到红点,即可包含该情况的退模糊处理。图5为2019年“利奇马”台风过程中强风速下一次模糊转向的退模糊示意,在负速度区域内的模糊区域中出现模糊转向后的绿色色块(图5a),退模糊后真实速度超过-54 m/s(图5b)。
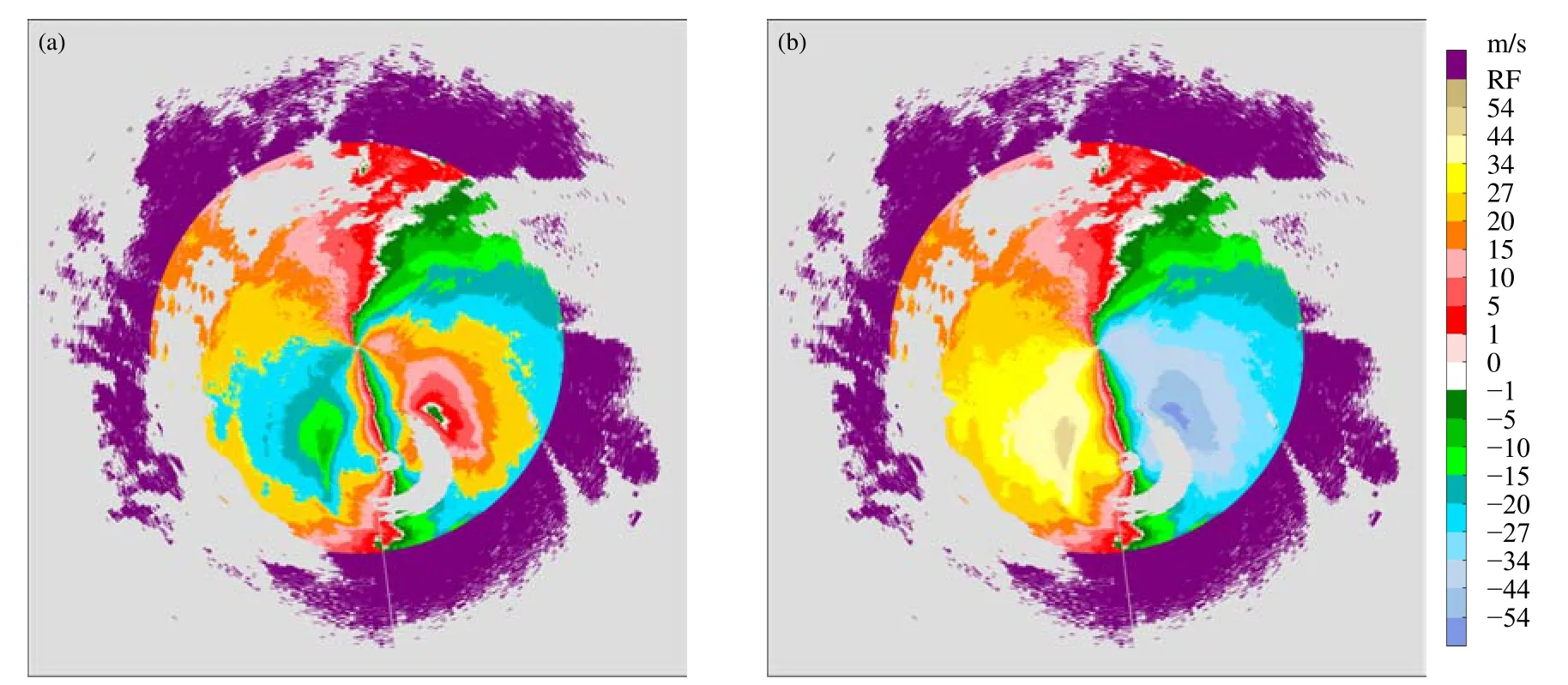
图5 一次模糊转向情况的退模糊示意(2019年8月9日14时58分台州雷达2.4°仰角观测的“利奇马”台风过程退模糊前(a)、后(b)的径向速度场)Fig.5 Dealiasing of one ambiguity turn caused by strong wind speed during typhoon (radial velocity field before (a)and after(b)dealiasing observed by Taizhou radar at 2.4°elevation during typhoon"Lekima"at 14:58 UTC 9 August 2019)
2.5.4 查找径向直线0速线

2.5.5 无0速线模式的退模糊处理
无0速线模式的退模糊处理方法见2.5.2节。图7为无0速线情况下退模糊,图7a中未找到符合条件的0速交界点,上层无0速线记录信息,也未查找到符合条件的径向0速线,只能通过无0速线模式处理(小图中A点周边的黑框范围即为2.5.2节中小范围邻域的示意),图7b为退模糊后。
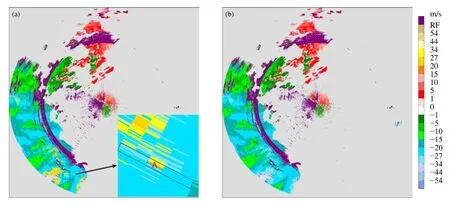
图7 无0速线情况下退模糊(2018年3月4日10时06分杭州雷达1.5°仰角观测的冰雹过程退模糊前(a)、后(b)径向速度场)Fig.7 Dealiasing case of no zero velocity line mode(radial velocity field before(a)and after (b)dealiasing observed by Hangzhou radar at 1.5°elevation during the hail process at 10:06 UTC 4 March 2018)
3 算法验证
3.1 验证结果
利用S波段多普勒天气雷达观测的飑线、冰雹、强台风等事件的11个个例对上述算法进行测试,以PPI(Plan Position Indicator)仰角层为单位统计退模糊准确率,通过人工判断,若一个仰角层上出现退模糊错误,则认为该层退模糊准确率为0。
表1给出了雷达数据来源和文中算法退模糊准确率,并与业务运行的退模糊方案(RPG版本11.3.6-S.DP)进行对比,检验了3407个速度模糊的体扫数据(一个体扫中至少有一仰角层出现模糊),文中方法退模糊准确率达98.7%(错误393层),业务方法准确率为96.3%(错误1135层),对于2018年3月冰雹个例,文中方法准确率高于业务方法10个百分点,业务方法的退模糊错误较为严重,大多为连续一段时间退模糊失败,尤其针对孤立回波退错情况较严重。
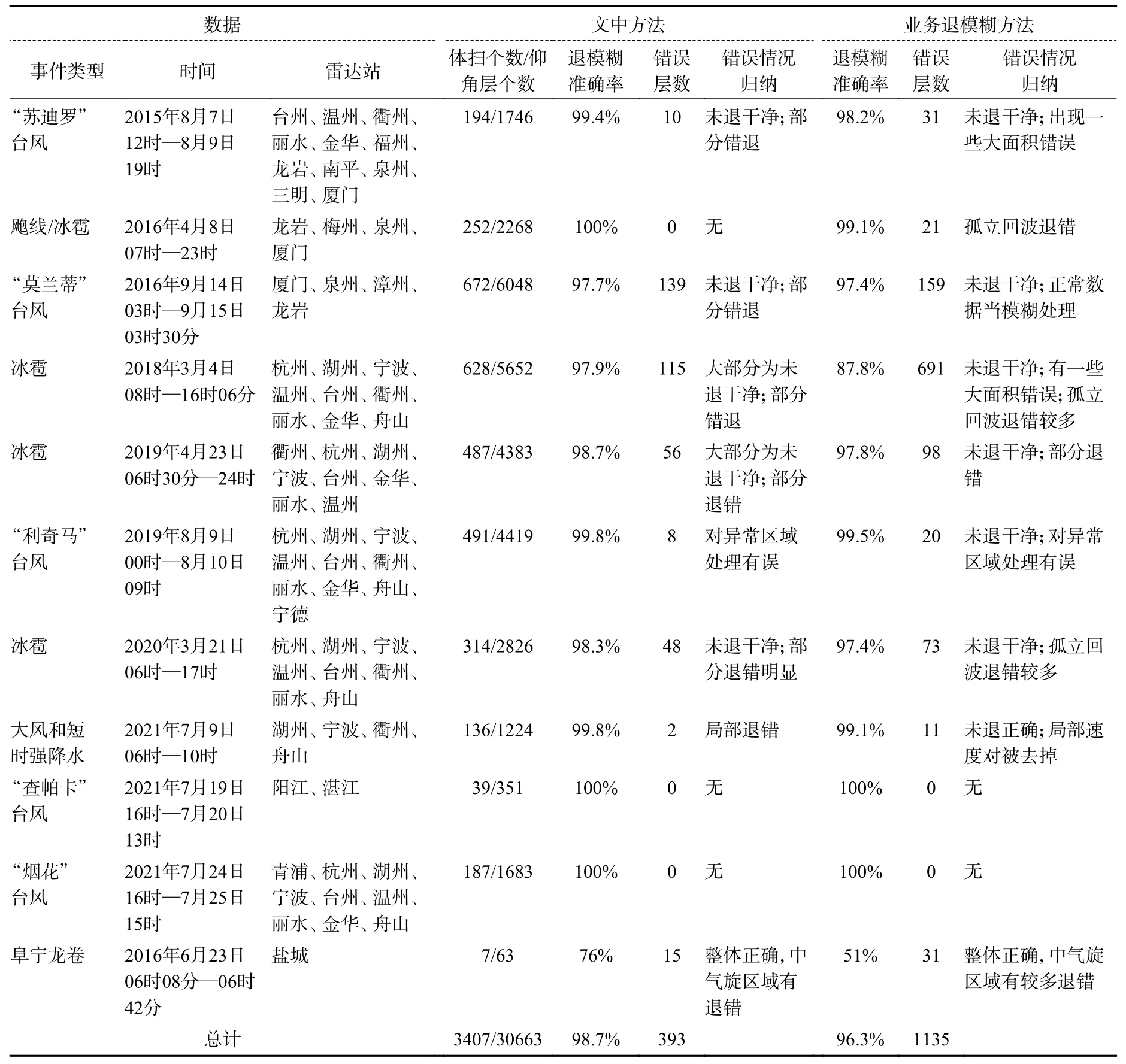
表1 退模糊算法试验的个例信息及退模糊准确率Table 1 The test data of the dealiasing algorithm and dealiasing accuracy

图6 查找径向0速线的退模糊(2018年3月4日14时34分舟山雷达6.0°仰角观测的冰雹过程退模糊前(a)、后(b)径向速度场)Fig.6 Dealiasing case of finding a qualified radial straight zero velocity line(radial velocity field before(a)and after(b)dealiasing observed by Zhoushan radar at 6.0°elevation during the hail process at 14:34 UTC 4 March 2018)
3.2 运行时间
算法试验在具有4核3.4 GHz处理器和24 G物理内存的电脑上进行,一个体扫资料平均耗时约43 s。文中算法程序用MATLAB软件编写,为解释性语言,程序如做进一步优化,运行时间将可能缩短。
4 个例分析
4.1 孤立回波的退模糊
图8为2018年3月4日10时16分 台 州 雷 达观测的2.4°仰角冰雹个例退模糊前(图8a)、后(图8b、c)的径向速度。正中心为雷达位置,紫色表示距离折叠(下同)。图8b中蓝、黄线是由0速交界点插值得到的0速线,根据0速线分区将图像分为负、正区域,较好识别了两侧的模糊区域,成功退去模糊,真实速度绝对值超过40 m/s。图8c为业务方法的结果,未退去东北侧的模糊区域,且将西侧正确的负值错当模糊处理了,未能还原真实速度,该方法仅将邻域作为参考值,未考虑图中整体的正、负径向速度分布。

图8 2018年3月4日10时16分台州雷达观测的2.4°仰角冰雹过程径向速度场(a.退模糊前,蓝、黄点表示查找到的0速交界点;b.文中方法退模糊后,蓝、黄线表示确定的0速线;c.业务方法退模糊后,箭头所指为退错区域;下同)Fig.8 Radial velocity field observed by Taizhou radar at 2.4°elevation during the hail process at 10:16 UTC 4 March 2018(a.before dealiasing,the blue and yellow dots represent the zero velocity junction;b.after dealiasing,the blue and yellow lines represent the determined zero velocity line;c.after dealiasing by operational method,the arrow indicates the error dealiasing area;the same hereafter)
图9为2018年3月4日08时54分 金 华 雷 达观测的2.4°仰角冰雹个例退模糊前、后径向速度。该时次雷达的西南侧出现速度模糊,文中依据0速线分区成功退去了模糊区域(图9b),图中靠近雷达站的区域为杂点干扰区,使用逐点判断法退去了模糊点,保留了杂点数据的原有大致特征,未过度改变其分布结构。该时次查找到符合条件的0速交界点较少(图9a),使用记录的上层0速线位置信息。业务方法未能退去该模糊区域,并把正确的负值错当模糊来处理,未能还原真实速度(图9c)。

图9 2018年3月4日08时54分金华雷达观测的2.4°仰角冰雹过程径向速度场(a.退模糊前,b.文中方法退模糊后,c.业务方法退模糊后)Fig.9 Radial velocity field observed by Jinhua radar at 2.4°elevation during the hail process at 08:54 UTC 4 March 2018(a.before dealiasing,b.after dealiasing,c.after dealiasing by operational method)
4.2 严重距离折叠遮挡情况
图10为2015年8月7日22时59分厦门雷达观测的0.5°仰角“苏迪罗”台风退模糊前(图10a)、后(图10b、c)径向速度。该时次出现较大面积的速度模糊,且被距离折叠覆盖得较为明显,为退模糊带来难度。文中依据查找的正、负0速交界点(黄点)得到正、负0速线(黄线),并依据记录的上层负、正0速线信息确定该层负、正0速线(蓝线),据此成功退去模糊区域(图10b)。业务方法成功退去正速度区模糊部分,但没能退去负速度区模糊,且还将部分正确的负值错当模糊来处理,未能还原真实速度(图10c)。
图10 2015年8月7日22时59分厦门雷达观测的0.5°仰角“苏迪罗”台风过程径向速度场(a.退模糊前,b.文中方法退模糊后,c.业务方法退模糊后)Fig.10 Radial velocity field observed by Xiamen radar at 0.5°elevation during typhoon "Soudelor"at 22:59 UTC 7 August 2015(a.before dealiasing,b.after dealiasing,c.after dealiasing by operational method)
4.3 中气旋的退模糊处理
图11为 阜 宁 龙 卷 个 例 中2016年6月23日06时31分盐城雷达观测的1.5°仰角径向速度场。该时次出现了较为明显的中气旋,文中依据确定的0速线(蓝线)退完模糊后,显示负值最大约-44 m/s,相接的正值约20 m/s,得到了正确的负、正速度对,呈现完整的中气旋(图11b),图11小框即为放大的中气旋区域。业务方法退去了负区模糊部分,但在中气旋的正、负速度交界处将部分正确的负值错当成模糊处理了(图11c)。

图11 2016年6月23日06时31分盐城雷达观测的1.5°仰角阜宁龙卷径向速度场(a. 退模糊前,b.文中方法退模糊后,c.业务方法退模糊后)Fig.11 Radial velocity field observed by Yancheng radar at 1.5°elevation during Funing tornado at 06:31 UTC 23 June 2016(a.before dealiasing,b.after dealiasing,c.after dealiasing by operational method)
5 结论与讨论
针对以往雷达退速度模糊算法中孤立回波或被距离折叠隔离回波出现模糊、杂点干扰等问题,文中提出了一种新的退模糊方法。
(1)通过查找0速点插值到线的方式,并综合考虑上层0速线信息、可靠性更高的另一0速线信息、最末已知0速交界点的方位信息以及局部搜索弱速度的方式来确定可靠的0速线。(2)利用0速线得到正、负速度分区,并通过识别模糊边界以圈定模糊区域来进行退模糊处理,可有效解决孤立及被隔离回波模糊的问题。经验证:针对孤立及严重距离折叠隔离的回波该退模糊方法比业务方法更有效,对2018年3月4日冰雹个例,准确率高于业务方法10个百分点(业务方法大多因孤立回波退错)。(3)对识别的杂点干扰区域,单独进行退模糊处理:依据模糊点邻域内最大速度临界点跃变、速度不连续、正负属性归属等多个特征,逐点判断其是否为模糊点,可避免受杂点干扰影响,同时保留杂点数据原有特征,不过度改变其分布结构。对未能确定0速线的情况及非杂点干扰区遗留模糊点的扫尾处理同样采用逐点判断其是否满足多个模糊特征的方法,也有一定效果,其中多次扩展邻域方法也考虑了孤立及被隔离的模糊回波。(4)检验了冰雹、强台风、飑线等事件11个个例3407个S波段雷达速度模糊数据,文中方法总体退模糊准确率达98%。对个例中出现的台风一次模糊转向严重速度模糊情况以及中气旋周围出现速度模糊情况也能退去。
文中方法秉持宁可不退,也不退错的思想,对0速线确立过程中每一步获取的信息都经严格把关及检验;退模糊点需满足多个模糊特征条件;且对0速线附近区域依据连续性原理,相对于0速线平均值速度变化小于0.2Vmax的点可保留不做退模糊处理。
大气流场的变化复杂多样,人工精力有限,难以将速度模糊图像全部规律置于算法中,达不到100%准确。目前人工智能发展迅速,依据现有工作的退速度模糊正样本,是否可用对抗神经网络模型学习其图像退模糊规律?是否可以建立智能专家知识库,归纳完整的人工退模糊逻辑思维规律?是未来可尝试的创新想法。此外,C波段、X波段雷达的最大不模糊速度更小,速度模糊现象更严重,退模糊难度也更大。文中识别模糊边界主要利用了最大速度值临界点跃变;逐点判断其多个模糊特征时也主要考虑最大速度值临界点跃变和速度不连续程度,而短波段雷达Vmax更小,更容易同正常的较大速度切变相混淆。如C波段雷达,同样的PRF,其最大不模糊速度约为S波段雷达的一半,无疑增加了更多不确定性。而通过0速线得到正、负速度分区,依然同S波段的情况没有差别,因此未来可根据时、空连续原则,记录前几个时次可靠的0速线位置信息以作为当前时次0速线信息的补充参考,相较于现有S波段算法可能有所改进,由此帮助维持最终的退模糊准确率(或不至于下降太多)。
致谢:感谢浙江省气象台赵放、浙江省气象信息网络中心王亚云和台州市气象局黄晓龙提供的帮助!