无人机和无人船在重点河段河道地形测量中的应用探析
2022-11-02马博
马 博
(安徽省宿州水文水资源局 宿州 234000)
1 概论
无人机机载激光雷达技术以无人机为载体搭载激光雷达系统,可以在短时间内获取大范围内的地表空间信息,具有精度高、效率高、穿透性强、免像控等技术优势。随着科学技术不断发展,搭载单波束测深仪、多波束测深仪的无人船在河道测量、地形测量、近海测绘等领域应用越来越普遍,相较于有人驾驶的测量船,无人船具有安全系数高、重量轻、吃水浅、跑线质量高等优点。
2 原理
2.1 无人机机载激光测量技术
无人机机载激光测量技术是一种以无人机为载体,集激光测距系统、POS 系统(含全球导航定位系统、惯性导航系统)及控制系统等测绘高新技术为一体的陆地三维地理信息数据采集技术。
该技术通过GNSS 系统提供飞行平台的位置,同时地面架设基准站提供后差分(DGPS)数据处理所需的同步相对地理信息、激光雷达测距系统根据激光反射测定地物与雷达的距离、惯导提供的姿态数据,并利用相关数据预处理软件计算从而获取精确的地表地物三维地理坐标,再通过测区参数转换得到目标三维成果。
2.2 无人船单波束测量技术
无人测量船系统是由船体、遥控器、测量通讯集成盒组成,船体作为仪器的主要载体,配备了无人船智能控制系统、定位系统以及动力系统。无人船测量方式可以分为自动航行模式和手动遥控模式,可以根据工作环境不同进行切换,当水域环境较好无障碍物时,可切换为自动航行模式;当水域环境比较复杂,障碍物比较多,如水草、枯树枝等漂浮物较多自动测量方式无法航行的时候,可以切换为手动遥控模式进行测量。无人船水下地形测量作业流程图见图1。
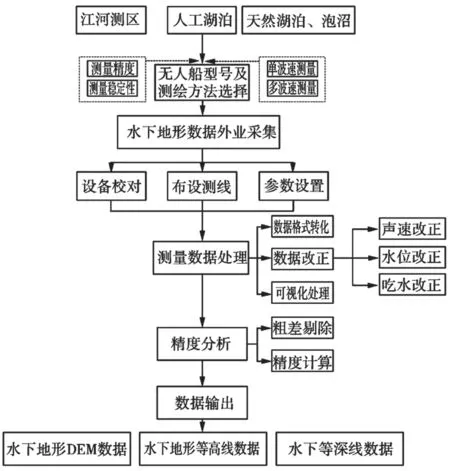
图1 无人船水下地形测量作业流程图
无人船搭载的测深系统主要分为多波束测深系统和单波束测深仪两种,无人船水下地形测量最常用的技术是单波束测深系统。
单波束测深原理是利用换能器向水下发射声波,由于声波在水中传播的过程中遇到河底将返回,通过声波在水中的传播速度以及往返时间计算水深数据。单波束测深仪是一种“由点到线”的测量方式,每次测量只能测量一个水深点,随着载体及设备的航行移动,产生由点到线的测量结果,通过由“点到线构面”得到水下地形数据。
2.3 无人机和无人船协同作业
无人机和无人船协同作业原理是:两者架设同一基站,基站同时开启静态记录和动态差分模式,静态数据采集可供无人机机载激光和无人船单波束GNSS 定位同时使用,动态RTK 也同步作为无人船GNSS 定位使用。
3 项目实践
3.1 项目缘由
重点河段河道地形测量工作是水利部推动新阶段水利高质量发展的一项重要工作。按照2022年全国水利工作会议要求,通过及时更新重要水文站大断面、重点河段河道地形信息,夯实水文测验基础,提高水文监测预报精度,强化洪水预报调度算据支撑,提升“预报、预警、预案、预演”支撑能力和水平。
3.2 测区概况
新汴河位于安徽淮北平原,是宿州市最大的防洪排涝骨干河道。西起自安徽省宿州市西北的戚(七)岭子,经宿州市埇桥区、灵璧县、泗县、江苏省泗洪县,于洪泽湖西缘注入洪泽湖西端的溧河洼,河道全长127.2km,流域面积6562km2。
本次地形测量选取布设有水文站的重点河段,新汴河宿县闸段,在宿县闸水文站测流断面上、下游各2~5km 的范围内开展河道地形测量。本次测区宽度1.2km,长度5.1km,面积6.12km2,地势较为平坦,地形高差15m 左右,测区内有水文站、船闸、翻水站、节制闸等水工建筑物及少量居民建筑物,两岸堤防有大量防护林,地形较为复杂。
3.3 设备选择
本项目采用D100 多旋翼无人机搭载智喙PM-1500 机载激光雷达测量系统,iBoatBS3 智能无人测量船搭载单波束测深仪相结合的水陆一体化全自动三维测量技术在新汴河宿县闸水文站应用为例,从数据采集、数据处理、成果展示和精度验证等方面进行系统地阐述,证明该技术的切实可行,为同类项目提供参考依据。
3.4 作业流程
3.4.1 数据采集
项目实施前架设基准站,基准站布置按照相关规范执行,开始实时差分信号发射和静态记录。无人机和无人船按照要求进行操作和数据采集。
D100 多旋翼智能航测系统利用飞行管家软件,导入测区范围后一键生成飞行航线,飞行高度109m,地面分辨率为1.7cm,航向/旁向重叠度为75%/75%。
智喙PM-1500 机载激光雷达测量系统利用飞行管家软件,导入测区范围后一键生成飞行航线,飞行高度300m,激光点频200 万点每秒,激光重叠度30%。
无人测量船根据此次河道的作业环境,合理安排航行路线。此次无人船采样间隔1m/s、断面间隔25m。
3.4.2 数据处理
无人机采集的倾斜数据,经Smart3D 影像处理软件编辑后,通过空三加密及三维建模输出测区三维实景模型(OSGB),输出测区分辨率为0.1m 的数字正射影像(DOM)。
无人机机载激光雷达测量系统采集的激光点云数据,经点云融合软件编辑后,通过激光点云(LAS)滤波分类,DEM 加载卸载、DOM 联合点云测图、点云快速绘制水闸、建筑物工具、切片裁剪、正射影像赋色等操作,输出测区分辨率为0.2m 的数字高程模型(DEM)。
无人测量船采集的水下地形基础数据,经HiMAX 测量软件处理后,输出水下地形的数字高程模型(DEM)。
无人机机载激光雷达测量系统数据采集技术路线见图2。
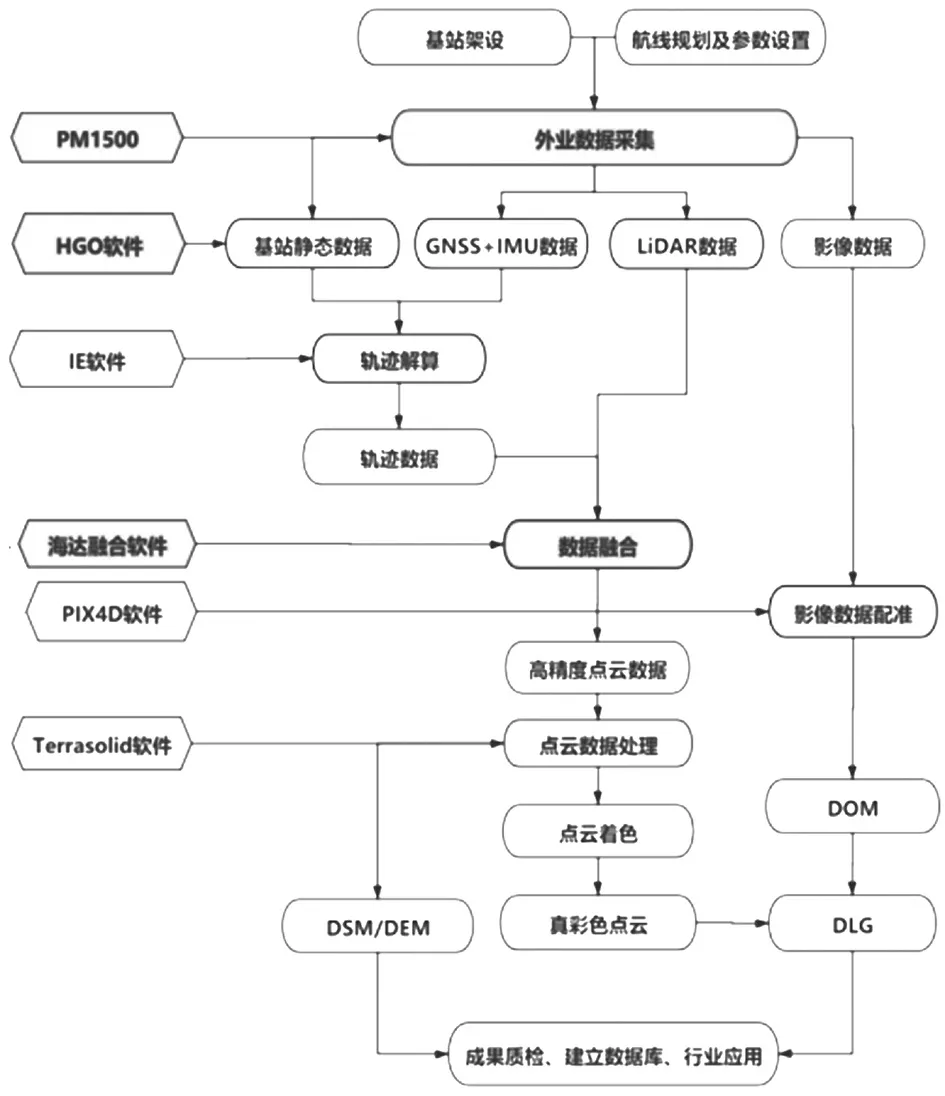
图2 无人机机载激光雷达测量系统数据采集技术路线图
3.4.3 成果展示
根据重点河段河道地形测量技术要求,基础测绘成果采集数字高程模型、数字正射影像、数字线划图,且成果要求数字高程模型分辨率为0.2m,数字正射影像分辨率为0.1m,本次测量成果满足上述要求。新汴河宿县闸段数字线划图见图3。
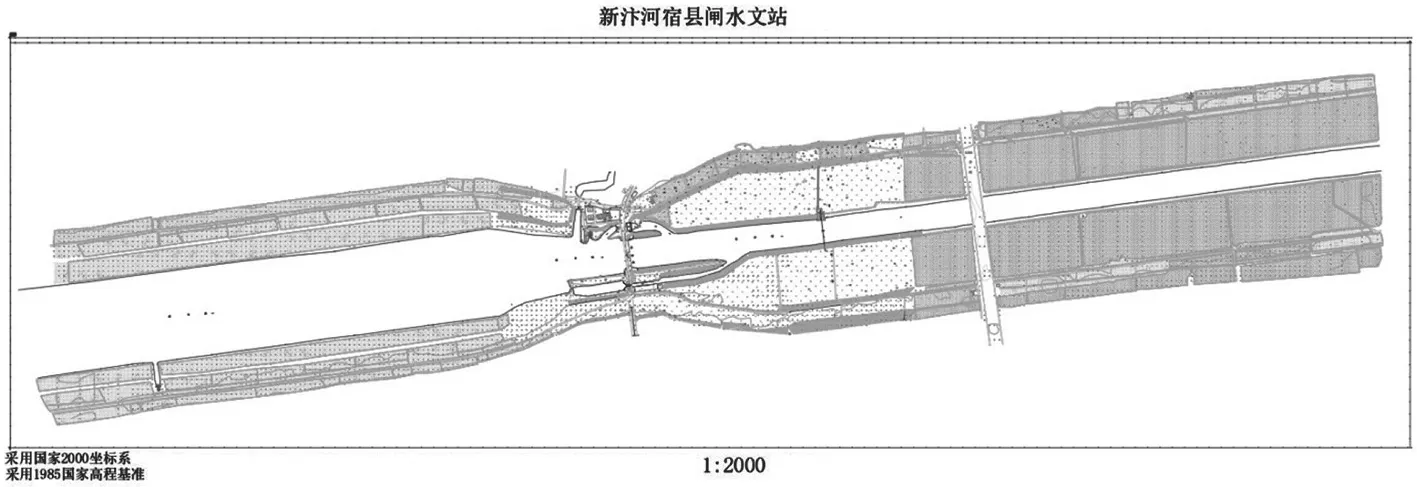
图3 新汴河宿县闸段数字线划图
3.4.4 精度验证
该项目精度验证采用RTK 在陆地和水下抽查12 个固定坐标点,经计算平面坐标误差±0.05m,高程中误差±0.15m,满足1∶2000 地形图误差要求(绝对定向限差,平面不大于±0.40m,高程不大于±0.20m)。
4 总结
本文以重点河段河道地形测量为应用场景,将无人机搭载机载激光和无人船搭载单波束测深仪进行有效结合,作为一种空地一体、水上水下一体化三维测量技术,可以快速准确获取河道地形,及时动态掌握河道冲淤和河势变化,满足开展河道特性研究、洪水演进分析和洪水精准预报等需要,为防汛减灾提供数据支撑■
