基于模糊PID控制仿真的飞机除冰液加热系统研究
2022-11-02孙列
孙 列
(西安航空学院 飞行器学院, 陕西 西安 710089)
随着我国科技的不断进步,越来越多类型的飞机逐渐出现在人们的日常生活中,成为人们出行的主要代步工具之一,被广泛应用于民用运输以及科学研究等领域中。由于飞机体型过大,通常情况下被停放于机场内部,若气候条件处于寒冷的冬季,可造成飞机机身因天气原因而出现积冰现象,不利于飞机的安全运行。因此,专业的除冰设备对于飞机稳定运行具有重要作用。但是传统飞机除冰液加热系统存在大滞后、非线性以及时变性等缺陷,易受外界因素干扰。本研究为实现对飞机机身的快速除冰,利用模糊PID控制方式对飞机除冰液加热系统进行设计,该加热系统可在最短的时间内完成加热以及大流量喷洒除冰液等操作,并且可实时对除冰液的实际温度进行控制,有利于保证除冰液喷洒的均匀性。
1 基于模糊PID控制的飞机除冰液加热系统模型构建
1.1 飞机除冰液加热系统基本原理
飞机除冰液加热系统的主要作用为:持续向飞机除冰设备提供温度较为稳定的除冰液,以此保证飞机运行的安全性。向飞机除冰设备中加入除冰液时,应保证除冰原液与水之间可在最短的时间内快速完成混合,并且使除冰液的黏度不被外界因素所破坏,飞机除冰液加热系统整体结构如图1所示[1]。
该系统主要由除冰液储液箱、即热式加热器、液压泵以及喷枪等设备共同组成。由于除冰液属于一种黏度较高的液体,为保证飞机除冰液加热系统对除冰液进行加热时,该系统的除冰效果不受外界因素所干扰,本研究选用柱塞式液压泵作为加热系统的核心设备,有利于提升系统的工作效率,对于飞机的安全行驶具有重要保障。该液压泵主要采用往复的工作模式进行运转,其工作方式与加热系统切换工作方式时,可使阀组件出现开启或者关闭现象,造成除冰液在液压泵的管道内出现不同程度的流量波动,不利于系统对除冰液温度的精准控制[2]。
1.2 飞机除冰液加热系统模型构建
本研究为保证飞机除冰液加热系统的稳定运行,采用实验测试的方式对该系统的模型进行构建。在实验过程中精准记录所得数据,根据该数据对飞机除冰液加热系统的温度飞升曲线进行绘制,飞机除冰液的流量为200 L/min时即可开始温度飞升曲线的绘制,飞机除冰液温度飞升曲线如图2所示[3]。
为保证加热系统在飞机除冰液处于200 L/min大流量下仍可维持大功率加热状态,采用时域法对该系统进行加热试验,以此实现对该曲线的精准处理,其中时域法通常情况下用于动态系统的测定。飞机除冰液温度飞升曲线的处理流程为
(3)最后由各项数据对系统的阶次n进行计算,求得阶次n=3[4]。
假设飞机除冰液加热系统的模型为
(1)
根据该模型对参数K和T进行计算,其公式为
(2)
(3)
式中:Δμ为阶跃输入幅值。
根据参数K和T的数值即可建立加热系统模型,当飞机除冰液的流量为200 L/min时,对该模型的实际曲线进行修正,得到系统的传递函数公式为
(4)
式中:T1=T2=T3=14,τ/T1=0.786,由于二者之间的比值大于标准值0.3,可表明飞机除冰液加热系统的延迟现象较为严重[5]。
通过表3可知,I≥6度面积与直接经济损失关联度最大,实际地震中,地震高烈度范围越大,说明受灾面积越大,导致的直接经济损失自然越高。框架结构比例、人均居住面积、农民人均纯收入、砌体结构比例与直接经济损失关联度靠前,事实上,这些方面均能反映该地区的经济发展水平,并且对该地区的经济水平产生重要影响,如框架结构建筑功能以商场和酒店为主,震害区框架结构建筑倒塌越多,所造成的直接经济损失也会越大。
2 基于模糊PID控制的飞机除冰液加热系统温度控制
本研究为有效降低飞机除冰液加热系统存在的误差问题,利用模糊PID控制算法的优势,对模糊PID控制器进行设计。模糊PID控制算法的整体思想为:若飞机除冰液加热系统的误差范围较大,应采用Fuzzy对系统进行控制;若飞机除冰液加热系统的误差范围较小,应采用PID控制方法对系统进行控制。模糊PID控制实际上是一种复合式的控制方法,该方法在保证系统动态响应效果的同时,有利于最大限度地改善飞机除冰液加热系统的稳态控制精度,飞机除冰液加热系统温度控制器整体结构如图3所示[6]。
2.1 PID控制器
通过动态特性参数法、稳定边界法等预整定方法对PID参数进行整定,即可得到PID参数值。为此本研究将PID控制器置于Matlab/Simulink环境下,利用Ziegler-Nichols经验公式整定PID参数值,该方法主要在稳定性分析方法的基础上完成相应计算,其计算流程为:
(1)首先假设Ki=Kd=0。
(2)其次,对系统的比例系数进行增加,直至飞机除冰液加热系统出现振荡后停止比例系数的增加,此时闭环系统的极点位于jω轴上。
(3)最后对系统内部各项参数进行计算。
参数Kp、Ki、Kd的计算公式为
(5)
式中:Km为飞机除冰液加热系统出现振荡时刻的K值;ωm为系统振荡频率,通过式(5)即可计算出各参数的值,Kp、Ki、Kd的数值分别为0.051 7、0.001 7、0.395 5。
2.2 模糊PID控制器
本研究对模糊PID控制器进行设计时,主要采用二维模糊控制器作为核心。该控制器可充分反映出系统在受控情况下各输出变量的动态特性,其中输入语句变量指的是系统误差e及误差变化ec[7]。
2.2.1 确定控制器结构
为保证模糊PID控制器对飞机除冰液加热系统的控制精度,本研究对系统内各个变量进行模糊集和论域范围的定义:
各变量的论域范围分别为:{-40,40}、{-50,50}、{0,3}。输入e、ec、u隶属度函数曲数如图4所示。
2.2.2 建立控制规则
若系统出现误差现象,可直接影响飞机除冰液加热系统的输出特性,为有效控制飞机除冰液加热系统的误差现象,本研究将构成的Fuzzy控制器应用于加热系统中,在该控制器的基础上对系统进行仿真实验。为在最短的时间内使飞机除冰液达到系统要求,应适当地对控制规则进行调整,模糊控制规则如表1所示。
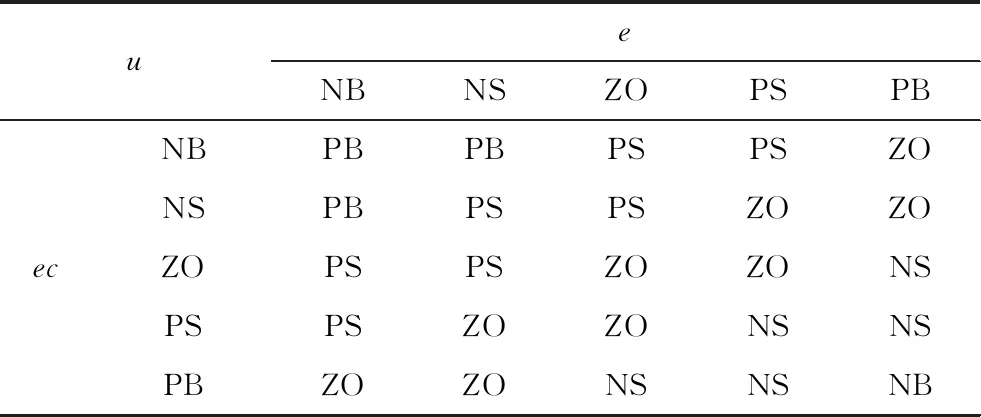
表1 模糊控制规则表
模糊控制规则确定后,采用最小-最大-重量法(MMG)的方式对加热系统进行反模糊化,反模糊化公式为
(6)
3 基于模糊PID控制的飞机除冰液加热系统仿真测试
3.1 飞机除冰液加热系统仿真模块
本研究为验证飞机除冰液加热系统对温度的控制情况,采用建立仿真模型的方式对该系统进行仿真测试。其测试流程为:首先将飞机除冰液加热系统置于Matlab/Simulink图像化建模环境中,实现模糊PID控制系统模型的建立,该仿真模型主要包括模糊控制器模块、PID模块等部分。
对该模型进行设计时,利用模糊PID控制算法将开关器安装在控制器与被控对象之间。该开关器的主要作用是根据偏差信号的差异性,实现加热系统对控制器的自动选择,有利于加热系统及时根据需求对控制方法进行更改。
开关器实现开关作用的方式为:假设输入通道2为条件通道,此时应对开关器的值进行设定,若输入通道2的开关器数值超过设定数值时,开关器应选择输出通道1;若输入通道2的开关器数值未超过设定数值时,开关器应选择输出通道2。由开关器的变化情况可知,给加热系统控制器中的开关进行适当数值的设定,即可实现加热系统对控制方式的自动选择,该系统可选择的控制方式主要包括模糊控制以及PID控制。通常情况下,设定值的最大误差值为10%,本研究对模糊控制及PID控制的转换数值进行设定时,将设定值定为|e0|=10[8]。
3.2 飞机除冰液加热系统仿真结果
本研究对飞机除冰液加热系统的仿真测试时,主要将模糊PID控制方式作为核心,结合该系统的数学模型,并采用对比分析的方式对加入Smith预估的PID控制、模糊PID控制以及模糊控制结果进行分析,有利于最大限度地保证飞机除冰液加热系统测试结果的精准性,从根源上对飞机的安全性进行保证,三种控制方式的性能比较如表2所示。
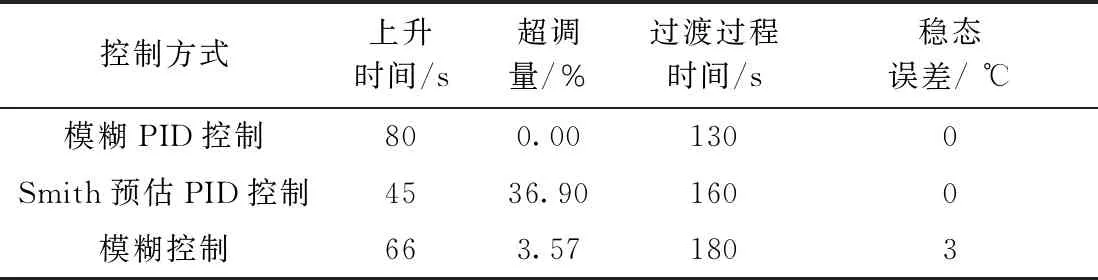
表2 三种控制方式的性能比较结果
通过对三种控制方式进行分析可知,三者之间模糊PID控制方式在上升过程中所消耗的时间最长,但是该方式的超调量为0,有利于最大限度地消除飞机除冰液加热系统在运行过程中产生的稳态误差,且过渡时间耗时最短,具有良好的稳定性及快速性,符合飞机除冰液加热系统对控制器的实际要求。
4 结 语
为保证飞机运行的安全性,设计出飞机除冰液加热系统,该系统的主要作用是持续向飞机除冰设备提供温度较为稳定的除冰液。由于除冰液属于一种黏度较高的液体,若向飞机除冰设备中加入除冰液时,加热系统无法保证除冰原液与水之间可在最短的时间内快速完成混合,可造成飞机因机身积冰现象过于严重,而出现安全隐患问题。为此本研究选用柱塞式液压泵作为加热系统的核心设备,有利于提升系统的工作效率,对于飞机的安全行驶具有重要保障。为保证加热系统在飞机除冰液处于200 L/min大流量下仍可维持大功率加热状态,采用时域法对该系统进行加热试验,实验结果可表明飞机除冰液加热系统的延迟现象较为严重。对于系统存在的稳态误差,本研究选用模糊PID控制算法对控制器进行设计,实现对加热系统的整体控制,并通过仿真测试的方式对系统精准性进行验证,结果表明该控制方式符合飞机除冰液加热系统的实际要求。