一种基于ESP32的智能钢管清洁机器人设计*
2022-11-02肖彦超何炳良蓝业厚
肖彦超, 余 江,2, 何炳良, 蓝业厚
(1.广东海洋大学机械与动力工程学院,广东 湛江 524088;2.广东省海洋装备及制造工程技术研究中心,广东 湛江 524088)
0 引言
目前在钢管的技术装备水平、技术含量、钢管品种规格等方面,中国钢管产业水平接近世界强国水平,同时中国钢管的产量占世界钢管产量的50%以上[1]。国家统计局统计数据显示,2019年我国钢管产量8 417.6万t,同比增长8.7%[2]。然而由于环境中的水分、氧气以及钢管表面残留物等各方面因素的综合影响,导致钢管表面相对容易被腐蚀氧化。而金属的生锈是一种很大的浪费,每年在全世界范围内因为金属的生锈而报废的金属设备和材料相当于其年产量的20%~40%。因此需要对钢管定期进行清洁工作,而研究一款智能钢管清洁机器人对于已固装钢管的清洁作业很有必要。
在工业机器人中,管道机器人作为一个重要的研究分支,正日益受到重视。管道机器人可分为管内机器人和管外机器人,人们对管内机器人已有较多研究[3-5],而对管外机器人的研究相对较少[6]。本文所研究的基于ESP32的智能钢管清洁机器人属于管外机器人。
目前,国内外在管外机器人的研究上已经取得了一定的成果,也开发出了适应各种管道类型的自动化机构[7]。但是在现阶段,根据国内外钢管清洗机器人的研究可知,钢管清洗机器人技术尚未成熟,还存在着以下问题:
1)对于爬管机器人的相关研究有限。虽然有不少对钢管滚动式爬管机器人进行相关研究的文献,但对于磁吸式爬管机器人的研究文献相对较少。同时,对于爬管机器人在水平钢管上爬行时重心问题的研究也不多。
2)对于已固装钢管的清洗机器人的相关研究有限。目前已有研究的钢管清洗机大多数应用于工厂的钢管生产过程中,这些钢管都是堆叠放置于仓库中,可运送至清洗机器中进行清洗。但对已固装在建筑上的钢管的清洗机器人相关研究较少。
3)钢管清洗机器人安装于钢管的方式比较烦琐。钢管清洗机器人在钢管上进行安装的方式比较多样,据相关文献可知,较为普遍的安装方式是将机器人的两部分通过螺栓连接的方式进行安装,这种安装方式无疑是烦琐且低效的。
研究该智能钢管清洁机器人是为了满足人类生产生活的需要。如今建筑楼层多、面积广,走廊钢管多且长,容易落灰、变脏和生锈,需要定期清洗,以保持整体整洁,否则容易产生管道损坏、使用性能下降、损耗材料、人力耗费等问题。而目前走廊钢管的清洗主要以人力清洁为主[8]。本课题组研究的智能钢管清洁机器人在保证清洁度的情况下,可以实现对钢管的自主清洁,不仅能够提高钢管清洁的工作效率,还可以节省更多的人力,降低成本,适用于学校、办公楼、商场等场合,能带来较好的经济效益和社会效益。
1 设计方案概述
课题组所设计的基于ESP32的智能钢管清洁机器人主要包括滚刷装置、爬行驱动装置、抽水装置等。该钢管清洁机器人采用模块化的设计方案,可以实现自动控制,同时不断优化机械结构设计,使设备轻便、易安装、不易损坏,并确定最优的机械结构设计。最终通过自主控制或手机以及其他的控制设备控制,使机器人在钢管上能够稳定前行、清洗,并且使其具有在清洗过程中自动控制水量等功能。
2 控制设计
2.1 硬件配置
该机器人采用多种模块配合控制机器人整体的工作,核心部分是安信可的ESP32-32S控制板,它负责机器人的爬行运动、钢管清洗、钢管末端检测等功能。机器人选用了红外光电模块,用于检测其清洗钢管时是否到达了钢管末端,防止意外发生。此外,该机器人还装有HC-07蓝牙模块,可通过手机蓝牙和APP连接机器人的蓝牙透传模块实现对机器人的调试与控制,具体可控制的功能有爬行清洗功能、爬行速度调节、清洗强度调节和抽水速度调节等;可调试的功能有爬行装置的爬行运动,清洗装置的清洗运动,微型水泵抽水和红外光电开关测试。通过这些硬件模块的功能协调,即可实现机器人的硬件控制系统功能。该机器人的硬件配置控制如图1所示。
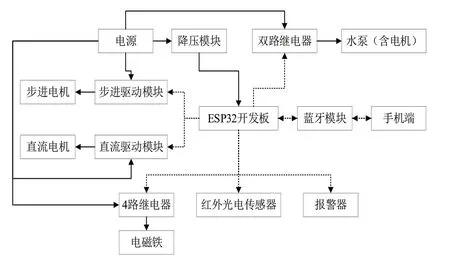
图1 机器人的硬件配置控制
2.2 软件设计
本钢管清洁机器人具有两种运行模式可选,自动清洗模式和蓝牙遥控模式,控制流程图如图2所示。
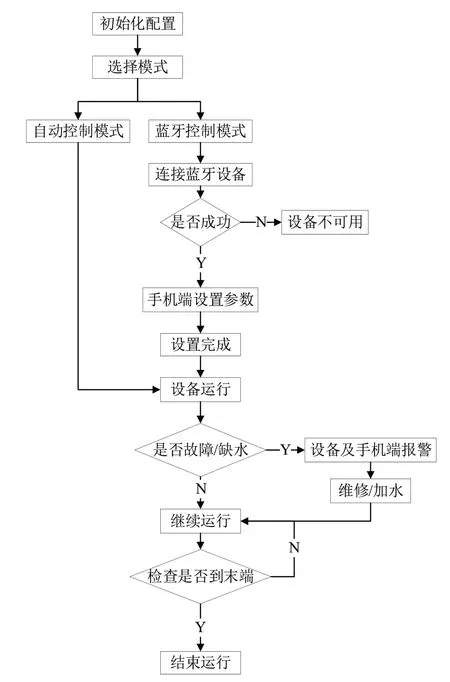
图2 机器人的运行程序设计
机器人开启运行后,可通过按钮选择模式。自动清洗模式可以让钢管清洁机器人直接运行设定的清洗程序,机器人在爬行前进的同时对钢管进行清洗。蓝牙控制模式可通过手机端对设备的各项相关参数进行调节,在设置完成之后设备会自动运行工作。当检测传感器检测到机器人到达钢管交叉处时,机器人将停止工作,进入待机状态。若要继续下一段钢管的清洁,需要由人将其转移工作。
3 结构设计
3.1 总体结构设计
如图3所示,该钢管清洁机器人主要由爬行驱动装置、滚刷装置、供水装置、锁紧装置和控制部分等组成,呈包围式。其清洁主要通过水泵1将水箱2里的水抽至滚刷装置前端,滚刷装置中带有软毛刷4的滚筒3开始旋转清洁;锁紧装置安装于滚刷装置套盖连接处,滚刷装置通过燕尾槽与爬行驱动装置连接。爬行驱动装置具有两组电磁铁夹臂机构6,每组夹臂机构上装有两块电磁铁5,机器人可通过两组夹臂机构上的电磁铁吸附于钢管外壁,当电磁铁通电时夹紧钢管,断电即松开,两组夹臂机构交替松紧实现爬行进给。该机器人的结构设计不考虑废水回收装置。

图3 机器人的总体结构
3.2 爬行驱动装置结构设计
该机器人的爬行驱动装置结合了爬行式钢管外表面打磨器[9]的磁铁吸附爬行方式和一种圆管外壁自动爬行打磨机器人[10]的滚轮式爬行方式,如图4所示。机器人的夹臂机构是可调的,能够向两侧伸展以适应一定直径范围的钢管。将机器人放置在钢管上后,初始状态下,后夹臂机构和前夹臂机构都处在同一直线上且其之间的距离处在最短状态;通过滚轮能够支撑机器人在钢管上吸磁爬行快速前进,减少移动时与钢管之间的摩擦。让后夹臂机构和前夹臂机构的电磁铁均通上电源,电磁铁牢牢地吸在钢管上,此时前夹臂机构的电磁铁断电,接着通过42步进电机背向后夹臂机构推进,让前夹臂机构远离机身部分一段可控距离,随即前夹臂机构的电磁铁通电吸住钢管[11];下一步则是让后夹臂机构的电磁铁断电,通过步进电机将自身拉向已吸牢钢管的前夹臂机构,随即后夹臂机构电磁铁通电吸住钢管。这已经完成了机器人的一段基本的爬行过程,通过上述方式重复交替运行即可进行持续的钢管爬行运动,若需要加快爬行速度,在一定范围内调节步进电机正反转时的转速即可。
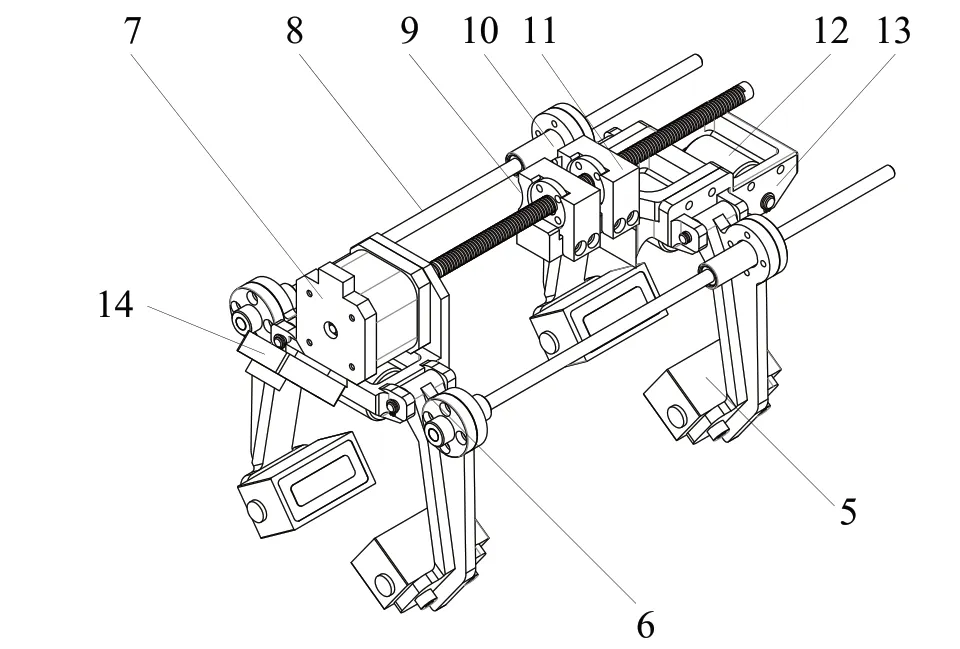
图4 爬行驱动装置结构
3.3 滚刷装置结构设计
该机器人的滚刷装置包括带有齿轮副的滚筒3、直流减速电机16、主支架19、左套盖15、右套盖20以及软毛刷4等,如图5所示。当机器人工作时,通过水泵将水箱里的水抽至清洗装置的一端,同时滚刷装置两侧的直流减速电机通过齿轮副带动安装在滚筒内的软毛刷,使得带有软毛刷的滚筒绕着钢管旋转实现对钢管的清洁;并且可以通过手机端蓝牙控制调节参数,在一定范围内调节直流电机转速即可调节清洗装置对钢管的清洁强度。清洁度的最大化需要爬行装置和清洗装置共同协调才能实现。同时,滚筒直径是固定的,通过更换不同长度的软毛刷可以在一定的直径范围内适应不同直径的钢管。
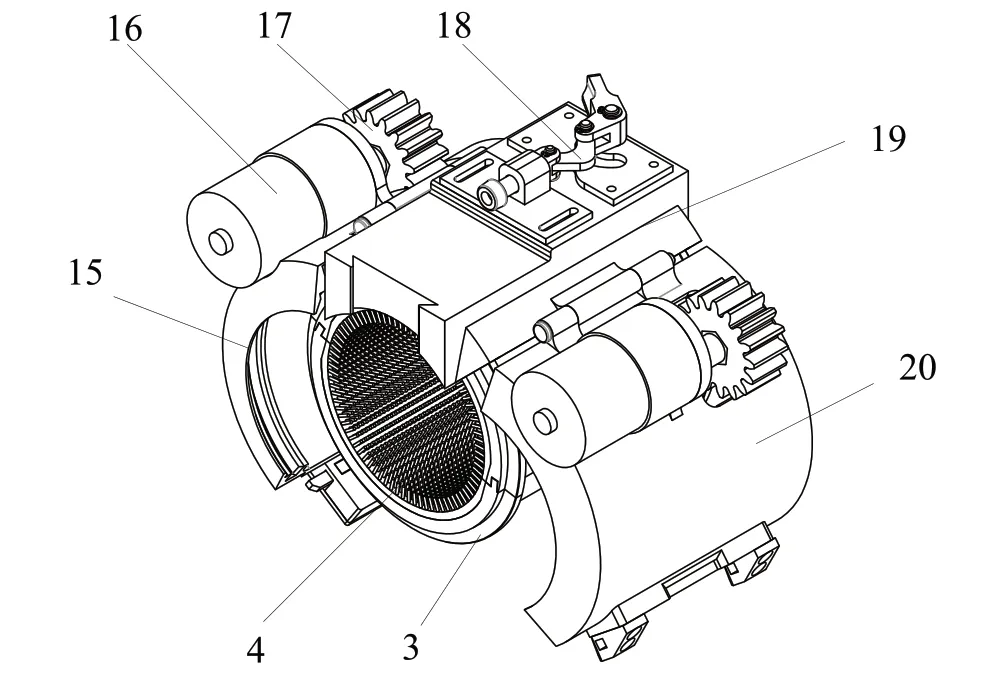
图5 滚刷装置结构
3.4 锁紧装置结构设计
机器人放上钢管后需要结合锁紧,防止中途松动掉落,为此专门设计了一种弹簧锁紧装置,该锁紧装置具有快速、方便等特点。锁紧装置由底座23、被动推杆21、解锁推杆24、弹簧22和两个锁扣25构成,如图6所示。当机器人的两个带齿轮副的滚筒套合上后,可通过该锁紧装置进行锁紧,使左、右套盖可以稳定快速地安装合拢。锁紧装置默认状态时被动推杆会向外伸出,当需要安装合拢左、右套盖时,应手动按住解锁推杆使被动推杆向内缩进去,同时将左右套盖合拢,完全合拢后松开解锁推杆,被动推杆则会卡进锁扣孔内。当钢管清洁完或中途停止需要拆下机器人时,可通过按压解锁推杆解锁。

图6 锁紧装置结构
4 结语
该基于ESP32的智能钢管清洁机器人采用模块化的设计,易于拆装,便于对该机器进行维护和技术改造,减少设备成本的同时提高设备的利用率。且该机器人滚刷装置的软毛刷是可拆装的,软毛刷作为清洁部位容易磨损,可拆装的软毛刷便于更换;其次,该机器人还能够通过选取软毛刷长度,适应一定范围内的钢管直径,并且通过适当调整爬行支架即可自适应调整设备的重心,使用操作简单。该设备还具有体积小、质量轻的优点,便于携带、搬运。其制造成本和使用成本较低,适用范围较广,具有良好的市场前景。
目前,对于该基于ESP32的智能钢管清洁机器人的研究设计还处于初步阶段,该阶段实现了其大部分应实现的功能并将其简单试验应用于一段距离的水平钢管。但其并不具备完善的功能使其适应较大的工作场合,具有一定的局限性,但本研究将会持续改进。
