事件触发一致性控制研究进展:触发条件的角度
2022-11-02刘玉晓郭阳明
龙 江 刘玉晓 王 薇 郭阳明
1.西北工业大学计算机学院 陕西西安 710129 2.西安蒙顿信息科技有限公司 陕西西安 710129 3.北京航空航天大学自动化科学与电气工程学院 北京 100191
随着现代军事理论的发展,传统指挥与控制技术也迎来了革新,作战对抗中需要指挥和控制的无人作战系统逐渐由单一系统向大规模网络化的多智能体系统转变[1].2021年4月,美海军首次在多作战域开展了聚焦无人系统、有人/无人联合的舰队演习——“无人系统综合作战问题21”,成功试验了“超级集群”项目,即研究如何利用和防御由小型无人机组成的大规模集群无人系统,并提出了“分布式杀伤”的概念[2].由此可见,网络化多智能体系统在现代战争中扮演着至关重要的角色.
智能系统间有组织地协同控制是完成复杂作战任务的关键.随着计算机技术、通信技术和先进控制理论的发展与融合,以及对群体行为内部机理的不断深入研究,多智能体系统协调控制问题成为了控制与人工智能领域的研究热点[3-5],其理论成果可应用于无线传感器网络定位[6]、卫星姿态同步[7-8]、无人机、地面移动机器人、水下航行器编队[9-11]、智能电网功率分配[12]等场景.根据协调控制任务的不同,多智能体系统协调控制问题又可进一步细分为诸多子问题,例如:不存在领航智能体的一致性收敛(leaderless consensus)[13-17]、存在一个领航智能体的一致性跟踪[18,20]、存在多个领航智能体的包含控制(containment control)[19]、编队控制(formation control)[9-11,21]、聚集(flocking)[22-23]等等.考虑到一致性控制是研究包含、编队、聚集等复杂协调控制问题的基础,本文将侧重于综述多智能体系统一致性控制方面的基础理论研究和进展.
大多数学者在设计一致性控制算法时一般假设智能体间能够连续地信息交互且智能体内部能够连续地执行控制任务,即同时连续地通信和控制输入更新.然而,在实际应用中一致性算法往往采用常周期的方式执行,即每隔一段固定时间智能体立刻执行一次通信和控制输入更新,也就是传统的周期采样控制(periodic sampling and control).虽然周期采样控制具有可预测性且易于实现,但该控制机制在闭环系统趋于稳定时会额外增加通信代价,进而造成通信和计算资源浪费[24].此外,较小的采样周期可能导致大量冗余系统采样状态被释放到共享网络中,造成网络拥塞,严重时可能导致智能体系统崩溃[25].
可靠的网络通信是多智能体系统实现一致性控制任务的基本保障.考虑到多智能体系统一般由多个微小的嵌入式系统组成,智能体自身配备的计算能力、通信带宽和电池容量等资源条件有限.为了改善周期采样控制的不足,同时节省网络资源,不少学者在设计一致性控制算法时选择采用事件触发控制技术(event-triggered control technique)[26-27].与常周期采样控制不同,事件触发控制依赖于预先设计的触发条件,当且仅当该触发条件满足时,智能体间才进行通信和控制输入更新.显然,事件触发控制可以有效节省通信和计算资源,进而延长智能体的运行寿命.关于事件触发采样的研究可追溯至20世纪60年代[28-29].随后,事件触发控制的思想也被应用于发动机的控制[30].随着大规模网络化系统的出现,事件触发控制在近20年迎来了蓬勃发展.文献[31]通过实验表明,在保证闭环系统性能的前提下,事件触发控制的控制更新次数比常周期采样控制产生的控制更新次数更少.因前者能够避免不必要的控制更新,所以在实现上更具灵活性[32].文献[33]针对一般非线性系统,基于Lyapunov稳定性理论,建立了事件触发控制的基本理论框架.以该理论成果为基础,学者们对文献[33]中的理论成果加以发展,提出了各种各样的事件触发控制方案,例如:自触发控制[34-37]、周期事件触发控制[38-39]、基于采样数据的事件触发控制[40]、动态事件触发控制[41]、积分型事件触发控制[42]、记忆型事件触发控制[43]、混合时间与事件触发控制[44]等等.值得说明的是,这些成果主要针对单个网络化系统的事件触发控制.
与单个网络化系统事件触发控制不同,多智能体系统的事件触发控制更为复杂,因为智能体内部复杂的系统动态以及智能体间的拓扑结构关系往往会给事件触发条件的设计带来困难.Dimarogonas 在文献[45-46]中首次考虑了一阶积分器型多智能体系统的事件触发一致性问题,并提出了事件触发和自触发两种一致性控制方案,初步建立了事件触发一致性控制的基本理论框架.随后,学者们又针对二阶积分器/一般线性/非线性多智能体系统[47-52],从状态/输出反馈、固定/时变拓扑等多角度提出了一系列的事件触发协调控制方案.值得说明的是,这些控制方案大多建立在精确已知的系统模型基础上.然而,在实际中多智能体系统可能存在未知参数、未建模动态、外界干扰、未知全局拓扑结构等不确定性因素.工程师们在设计一致性控制算法时若不考虑上述不确定性因素,设计的一致性控制算法可能无法实现预期的控制目标.为了提高控制算法的鲁棒性和有效性,学者们又提出了基于鲁棒控制和自适应控制的事件触发一致性控制方案[21,53-56].
本文将围绕多智能体系统的事件触发一致性控制,对具有代表性的研究成果进行详细综述.首先,以一般非线性多智能体系统为例,给出事件触发一致性控制的基本框架和存在的关键问题.然后,从触发条件的角度,分别对各种类型的静态/动态触发条件对应的一致性研究成果进行综述,并详细分析各种触发条件的优缺点.考虑到智能体可能存在各种不确定性因素,本文还将讨论自适应技术在一致性控制律设计和触发条件设计中的应用.
1 事件触发一致性控制的基本框架及关键问题
1.1 基本框架
考虑一组由N 个智能体组成的多智能体系统.假定智能体间的相互作用关系由固定拓扑结构图描述,其中,表示智能体对应的节点集合,表示智能体间的边集合.如果存在,那么智能体j 可以获得智能体i 的信息,反之不成立[57].在此情况下,智能体i 被称为智能体j的邻居.采用符号来表示智能体i 所有邻居的集合,同时规定智能体不是自己的邻居,即且.定义智能体间的邻接矩阵为,其中,表示,反之,表示.
对于连续时间智能体,其系统动态为

在多智能体系统的事件触发一致性控制中,智能体的控制算法由两部分组成:一致性控制律和触发条件.

其中,K1表示具有合适维数的设计参数,是对未知参数的估计.
通常智能体i 的触发条件可表示为

与一致性控制算法类似,依据触发条件是否用到所有智能体的状态和全局信息,也可将其分为集中式、分散式、分布式以及完全分布式4 种事件触发条件.不同之处在于,分散式和完全分布式触发条件由于不需要用到全局信息使其更常用.鉴于分布式和完全分布式一致性控制方案的优点,本文对集中式和分散式事件触发一致性控制方案不作过多阐述,感兴趣的读者可以参考文献[45-46,60-61].
在多智能体系统的事件触发一致性控制中,事件触发机制一般作用于智能体间的通信端和智能体内的控制输入端.基于事件触发机制的多智能体控制系统结构如图1所示.
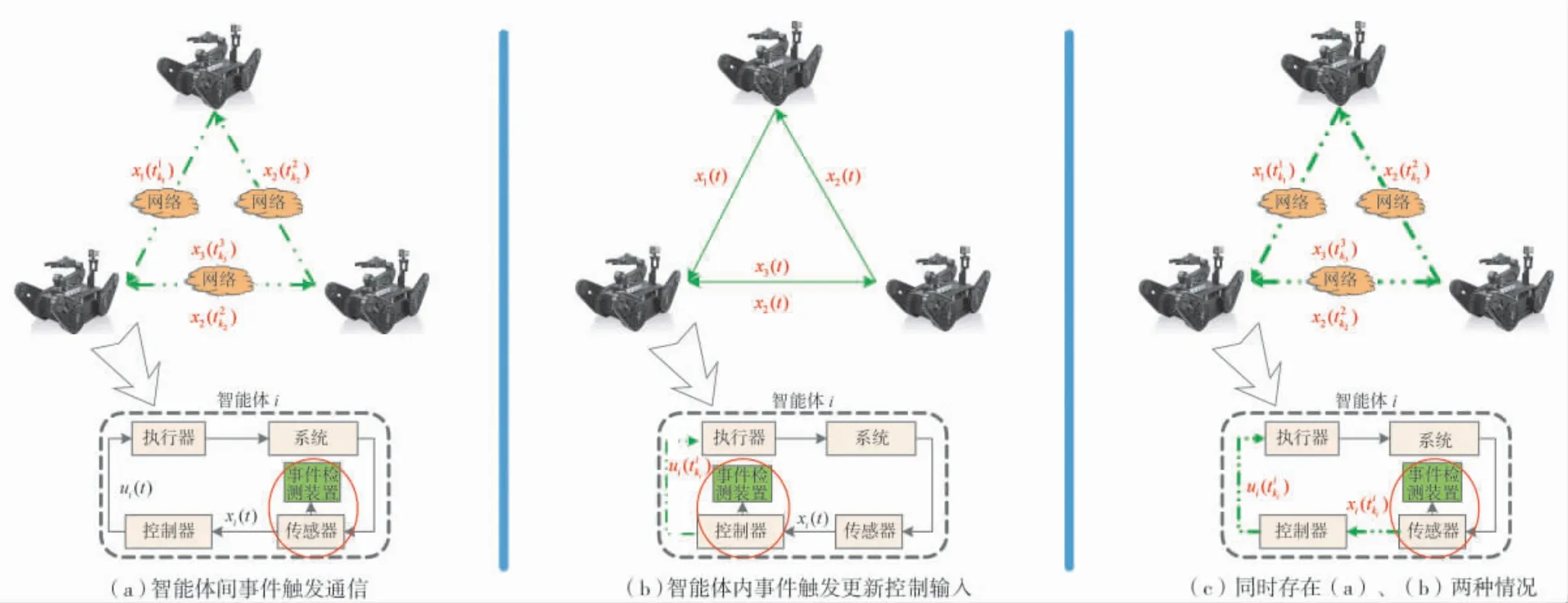
图1 基于事件触发机制的多智能体系统结构图Fig.1 Configuration of multi-agent systems based on event-triggered mechanism
1.2 关键问题
以一阶积分器型多智能体系统为例来说明事件触发一致性控制中存在的关键问题.考虑一组N 个一阶积分器型多智能体系统

针对此类多智能体系统,在无向通信拓扑结构下,Dimarogonas 等首次提出了如下事件触发一致性控制律和触发条件[45-46]:


虽然文献[46]证明了在一致性控制律(5)和触发条件(6)共同作用下,所有智能体的状态都能趋于平均一致性(即智能体的状态最终趋于所有智能体初始状态的平均值),但该一致性控制算法仍然存在如下不足:
1)Zeno 现象:文献[46]证明了至少存在一个智能体不存在Zeno 现象(即触发条件在有限时间内发生无限次触发[62-63]),但无法保证所有智能体都不存在Zeno 现象.此外,也无法保证相邻两次触发间隔时间的下界严格大于一个正常数.因此,在实际中事件检测装置很难执行该触发条件.
2)连续监督邻居智能体的状态:由式(6)可知,触发函数包含了连续的邻居状态xj(t).这表明在执行该触发条件时,智能体间依然需要连续通信,或者智能体需要借助视觉、雷达等额外设备来连续监督邻居的状态.
3)连续检测触发条件:由式(6)中定义的测量误差ei(t)可知,该触发条件用到了智能体自己的连续时间状态,意味着智能体需要安装额外的检测设备来连续检测该触发条件,这无疑会增加智能体的检测和运行成本.
4)控制律频繁更新:通过观察式(5)中的一致性控制律可知,智能体i 的控制律会在邻居的触发时刻更新.对于大规模的多智能体系统而言,若智能体i同时存在大量邻居,那么邻居状态的触发会导致智能体i 的控制输入高频更新,甚至导致执行器剧烈抖动.
综上不难发现,在多智能体系统的事件触发一致性控制中主要存在两方面的关键问题:1)如何设计合理的触发条件使其能够在避免Zeno 现象和保证触发间隔时间下界存在的同时,避免连续监督邻居智能体的状态和连续检测触发条件;2)如何设计一致性控制律使其仅在智能体自己的触发时刻更新,避免受到邻居触发时刻的影响.
2 基于触发机制的一致性控制研究现状
考虑到触发条件是事件触发一致性控制的核心组成部分,根据触发阈值函数是否含有额外动态变量(即除智能体状态或输出以外的辅助变量或内部动态变量)将触发条件分为静态触发条件和动态触发条件两大类[64-65].若触发条件的触发阈值函数不含额外动态变量,则称其为静态触发条件;反之,则称其为动态触发条件.
2.1 静态触发条件
2.1.1 连续依赖邻居状态型触发条件
连续依赖邻居状态型触发条件,顾名思义指触发函数连续依赖于邻居状态的触发条件,其形式可表示如下:
在事件触发一致性控制中,此类触发条件采用相对较多[45-46,49,51,58,63,66].
在文献[45-46]基础上,Fan 等进一步研究了一阶积分器型多智能体系统的汇合控制问题[58],通过定义联合测量误差(即,其中,),提出了分布式的汇合控制方案.该控制方案也解决了文献[46]中存在的由邻居触发状态导致的控制输入频繁更新问题.Xie等针对一阶非线性多智能体系统,在切换拓扑结构下,提出了分布式的一致性控制方案[65].然而,文献[45-46,58,66]的不足在于,文中设计的触发条件无法保证所有智能体都不存在Zeno 现象[62-63,67].为了排除可能发生的Zeno 现象,Zhu 等在触发阈值函数中加入了正常数[49],但此方法仅能保证有界的一致性.Sun等提出了在触发阈值函数中加入了类函数的方法[63].Liu 等在触发阈值函数中引入了动态变量,该变量不仅能有效避免Zeno 现象,还能延长触发间隔时间[68].虽然文献[63,68]中的方法都能够有效排除Zeno 现象,,同时实现渐近收敛性能,但该方法无法保证最小触发间隔时间大于一个正常数.Hu 等提出了为触发函数设置一个定时器,该定时器决定了触发间隔时间的下界[69],但该定时器大小的选取依赖于Laplacian 矩阵的特征值,因此,该触发条件不具有完全分布式的形式.综上所述,虽然采用此类触发条件能够设计不受邻居智能体状态更新影响的一致性控制律[49,51,58,66,68-69],避免控制输入出现频繁更新问题,但此类触发条件也存在3 方面的局限:1)如何在排除Zeno 现象的同时,保证最小触发间隔时间的下界存在,并实现一致性误差的渐近收敛;2)智能体间仍需要连续通信或连续监督邻居的状态;3)智能体需要额外的设备来连续检测触发条件.
2.1.2 离散依赖邻居状态型触发条件
为了避免连续监督邻居智能体的状态,学者们又提出了如下形式的离散依赖邻居状态型触发条件[8,21,70-76]:

基于离散依赖邻居状态型触发条件,Garcia 等针对一阶积分器型多智能体系统,提出了分布式的一致性控制方案[70],但文中无法保证所有智能体都不存在Zeno 现象[71-72].为了解决这一不足,Nowzari 等对文献[70]中触发条件加以改进,并增加了一条触发规则[71-72],即如果智能体i 在时间段内接收到了邻居状态,其中,是满足一定条件的设计参数,那么智能体i 立刻向自己的邻居发送状态.该方法有效避免了Zeno 现象,并且保证了相邻两次触发间隔时间的下界存在.Xie 等针对一阶积分器型多智能体系统,基于自适应控制理论,提出了基于边和节点的自适应事件触发一致性控制方案[73].Cheng 和Li 分别在文献[74-75]中考虑了一般线性多智能体系统一致性收敛和一致性跟踪问题,并提出了完全分布式的自适应事件触发一致性控制方案.Qian 和Wan 在文献[76]基础上进一步提出了能保证最小触发间隔时间的触发条件[75].Xu 等提出了两种基于观测器的自适应动态事件触发控制策略,其中智能体间采用”一对一”和“一对多”的通信模式[77].Long 等研究了链式积分器型高阶非线性系统的一致性问题,在弱连通平衡图条件下,提出了完全分布式的事件触发自适应一致性控制方法[78].随后,Long 等进一步将研究成果推广到了强连通的拓扑结构,研究了Euler-Lagrange 系统的时变编队控制问题,并提出了完全分布式的动态触发条件和时变编队控制算法[21].值得说明的是,文献[21,73-78]仅考虑了智能体间事件触发通信,但智能体内的控制输入仍需要连续更新.此外,在执行文献[21,71-78]中的触发条件时,每个智能体都需要连续检测触发条件.
2.1.3 状态无关型触发条件
状态无关型触发条件是另一种避免连续监督邻居状态的有效方法,其表达式如下:

Seyboth 等针对一阶/二阶积分器型多智能体系统,首次采用了状态无关型触发条件,在无向通信拓扑结构下,提出了分布式事件触发一致性控制方案[47].随后,Wei 等考虑了与文献[46]相同的智能体系统,并提出了基于边的事件触发一致性控制算法[79].针对有向通信拓扑结构下的一般线性多智能体系统,Yang等提出了事件触发一致性控制方案[80].但文献[47,79-80]的不足在于,为了保证最小触发间隔时间的下界存在,触发参数的选取依赖于全局信息,即Laplacian 矩阵非零最小特征值.为了避免用到全局信息,Wang 等采用了常数阈值的触发条件,并针对含未知参数的一阶和高阶非线性多智能体系统,提出了完全分布式的自适应一致性跟踪控制方案,但跟踪误差仅能收敛到有界的紧集[54-55].随后,Long 等进一步改进了常数阈值的触发条件,有效改善了由常数阈值导致的传输信号失真问题,并从输出反馈的角度设计了自适应一致性跟踪控制律[56].值得说明的是,虽然文献[47,54-56,79-80]中的状态无关型触发条件结构简单,且易于排除Zeno 现象,但此类触发条件也存在不足:1)当时,多智能体系统仅能保证有界的收敛性能;2)触发条件是否触发仅与信号的幅值变化有关,而与闭环系统性能无关;3)如何选取合适的触发阈值是个难点;4)智能体需要额外的设备来连续检测触发条件.
2.1.4 周期采样型触发条件
为了同时避免连续监督邻居状态和连续检测触发条件,Meng 和Chen 首次将具有如下形式的周期采样型事件触发机制应用于多智能体系统一致性控制[81].

鉴于上述优点,周期采样型触发条件在一致性控制中被广泛采用[82].Guo 等针对一般线性多智能体系统,设计了周期采样事件触发一致性控制方案,并基于Lyapunov-Krasoviskii 理论分析了多智能体系统的渐近一致性[83].此外,文献[83]还引入了有限时间段[0,kh)内的平均传输速率来度量通信资源利用情况.随后,学者们又从输出反馈[80]、一致性跟踪[85-87]、通信时延[88-89]、网络安全[90]等多角度对文献[81,83]中的理论进行发展.值得说明的是,文献[81,83-89]中的理论成果都建立在同步周期采样框架下,即使智能体分布在网络中的不同位置,每个智能体也依然保持同步的采样时钟.然而,在实际应用中很难做到这点,这使得基于异步周期采样的事件触发一致性控制方案更具实用性[91-92].此外,文献[81,83-86,88-89]中的触发条件仅利用了智能体自己和邻居当前的采样状态,忽略了历史采样的有用数据.文献[93-95]通过合理利用当前和历史采样数据设计了记忆型触发条件,在减少智能体间通信量的同时,提高了系统的瞬态性能.
2.1.5 自触发条件
与事件触发条件不同,自触发条件的下一次触发时刻由当前触发状态和系统动态共同决定[34-37],是通过预测计算得到.在多智能体系统中,智能体的自触发条件[46,96-97]具有如下形式:

Dimarogonas 等针对一阶积分器型多智能体系统,首次设计了基于自触发控制的分布式一致性控制方案,并比较了自触发条件与事件触发条件导致的控制更新次数[46].结果表明,自触发条件导致的控制更新次数更多,意味着自触发条件存在一定保守性.Fan 等进一步修正了文献[46]中的自触发条件,避免了发生Zeno 现象[96-97].随后,学者们又针对二阶积分器系统[98]、一般线性系统[51,99-101]、非线性系统[102-104]、离散系统[105-106]、随机系统[107]等各种类型的智能体系统,从状态反馈、输出反馈、输入/传感器饱和、收敛性能等多角度设计了自触发一致性控制方案.尽管如此,目前针对含未知系统参数的非线性系统自触发一致性控制方面的研究成果还相对较少,因为未知的系统参数给预测函数的设计带来了困难.
2.1.6 积分型触发条件
积分型触发条件指在相邻两次触发间隔时间内对触发函数进行积分的触发条件[108-114],其表达式如下:

观察式(12)可知,智能体需要连续检测该触发条件,但是否需要连续监督邻居智能体的状态取决于触发函数是否含有连续的邻居状态.
针对线性时不变系统,Mousavi 等提出了积分型触发条件的思想,指出该触发条件不再要求Lyapunov函数的导数在相邻两次触发间隔时间内一直小于0,并证明了在相同条件下积分型触发条件比传统事件触发条件的触发间隔时间更大[42].随后,Ghodrat 将积分型触发条件应用于多智能体,解决了一阶积分器型多智能体系统的一致性问题[108].Zhang 等针对存在和不存在领航智能体的一般线性系统,设计了分布式的事件触发一致性控制方案[109-110].Ma 和Zhao 采用积分型触发条件解决了一类切换线性系统的输出调节问题[111-112].Chung 等研究了一般线性系统的二分一致性问题,并设计了相应的积分型事件触发一致性控制算法[113].Dai 等针对一阶Lipschitz 非线性多智能体系统,提出了基于边的事件触发和自触发一致性控制方案[114].虽然积分型触发条件逐渐被学者们接受和采用,但智能体需要额外设备来连续检测该触发条件.因此,基于采样数据的积分型触发条件还有待进一步研究.此外,针对离散多智能体系统设计的此类触发条件还未发现.
2.2 动态触发条件
2.2.1 动态辅助变量型触发条件
多智能体的动态辅助变量型触发条件[21,115-120,122-125]通常可表示如下:


近几年动态辅助变量型触发条件也被广泛应用于多智能体系统的一致性控制.Yi 等针对一阶积分器型多智能体系统,在无向通信拓扑结构下,首次提出了基于动态触发条件的一致性控制方案[115].随后,Yi 等进一步说明了动态触发变量有助于排除Zeno现象[116].Hu 等针对一般线性多智能体系统,在强连通拓扑结构下提出了分布式的事件触发一致性控制方案[117].为了避免连续监督邻居智能体的状态,文中给出了一种通过计算来获取连续邻居状态的方法.He等同时考虑了存在和不存在领航智能体的一般线性系统一致性问题,并借助自适应增益技术,设计了完全分布式的事件触发一致性控制算法[118].在此基础上,He 和Mo 进一步考虑了可能发生的网络攻击,并设计了弹性事件触发一致性控制律[119].Li 等设计了能适用于切换拓扑的一致性控制方案[120].Yi 等针对含非匹配未知动态的高阶非线性多智能体系统,同时考虑了事件触发更新控制输入和预设系统性能两种情况,并提出了分布式的动态事件触发一致性跟踪控制方案[121].值得说明的是,文献[117-121]都是从状态反馈的角度来设计一致性控制律.与文献[117-120]不同,Koike 等从输出反馈的角度提出了基于状态观测器的动态事件触发一致性控制方案[122].动态辅助变量型触发条件也被应用于非线性的多智能体系统,感兴趣的读者可以参考文献[21,123-125].
2.2.2 动态参数型触发条件

动态参数型触发条件顾名思义指触发参数可以根据某种规则动态调节的触发条件.通常此类触发条件具有如下形式:其中,表示可动态调节的触发参数.从通信资源利用的角度,当通信资源不紧张时适当减小触发参数,以减小阈值函数,增加触发频率,有助于提高系统性能;当通信资源紧张时适当增大触发参数,以增大阈值函数,减小触发频率,从而缓解通信负担.从系统演化过程的角度,当系统在瞬态过程时,适当减小触发参数有助于快速稳定系统;当系统在稳态过程时,适当增大触发参数可以有效节省通信资源.因此,动态触发参数的引入为触发条件的设计提供了一个额外自由度,并且赋予了触发条件智能调节行为[64-65].
针对含有执行器饱和的非线性多智能体系统,Yin 等分别采用连续状态和采样状态设计了两种事件触发一致性跟踪控制方案,其中触发参数采用了自适应的调节机制[126].基于类似的自适应触发参数调节机制,Ge 等为一般线性多智能体系统设计了分布式的事件触发编队控制律,给出了保证编队渐近收敛的充分条件[127].此外,文中还说明了动态触发条件比传统静态触发条件在减少数据传输频率和获得期望编队性能方面更有优势.随后,又将动态参数型触发条件应用于传感器网络,解决了离散线性系统的分布式事件触发一致性滤波问题[128].针对存在通信时延的离散线性系统一致性跟踪控制问题,Yin 等提出了分布式的自适应事件触发预测控制方案[129].针对存在通信时延和网络攻击的连续时间线性多智能体系统,Yuan 等提出了分布式的自适应事件触发一致性跟踪控制方法[130].值得说明的是,文献[126-127,129-130]中的动态触发参数都具有单调递增或递减的特点,仍不能根据智能体系统动态过程智能调整大小.
2.3 小结
本节综述了6 类静态触发条件和两类动态触发条件在多智能体系统一致性控制中的应用情况,分析了各种类型触发条件的特点,如表1所示.综上所述,周期采样型触发条件和自触发条件都不需要连续监督邻居智能体的状态或连续检测触发条件,有利于触发条件的实施.但如何将这两种触发条件应用于更接近于真实物理系统的含未知动态、未知参数的非线性多智能体系统一致性控制还有待发展.积分型触发条件和动态辅助变量型触发条件都能实现增大触发间隔时间的目的,但只有将这两种类型的触发条件与周期采样型触发条件或自触发条件相结合才能更好地实施.动态参数型触发条件具有一个额外设计自由度,拥有智能调节触发频率的能力.然而,当前研究成果中的动态参数型触发条件还不具备该能力.在未来的研究工作中,如何针对各种类型多智能体系统,设计更合理、更智能的触发条件仍然是挑战.

表1 典型事件触发条件及其优缺点Table 1 Advantages and disadvantages of typical triggering conditions
3 自适应技术在事件触发一致性控制中的应用
在多智能体系统的事件触发一致性控制中,自适应技术常用于处理未知系统动态、未知参数、外界干扰等智能体内部或外部的不确定性,也用于估计未知的全局信息(即Laplacian 矩阵的特征值或特征向量里的元素).此外,自适应技术还被用于设计自适应增益,以保证系统稳定性或避免用到全局信息.本节对自适应技术在事件触发一致性控制中的应用作简要介绍.
3.1 逼近未知系统动态
当智能体内部存在未知系统动态时,自适应技术常与神经网络或模糊逻辑系统相结合用于逼近未知的系统动态,即自适应神经网络控制或自适应模糊控制[129,131-133].但这两种逼近技术都只能实现对未建模动态的有界逼近,使得基于自适应神经网络控制或自适应模糊控制的一致性研究成果一般只能实现有界的一致性收敛或跟踪.此外,若仅采用自适应神经网络控制或自适应模糊控制,则大多数多智能体系统仅保证了半全局稳定[129,131-133].
3.2 估计未知系统参数
若智能体系统含有未知的系统参数,且未知参数具有线性参数化结构,自适应技术也常用于估计未知系统参数[21,54-56].但这些文献中的参数估计并未收敛至真实的系统参数.若参数估计需进一步收敛,那么回归向量还需满足持续激励条件,或者借助一些新的自适应估计方法[134-136].
3.3 处理外界干扰
在真实环境中,外界干扰信号往往存在有界的上界.为了补偿外界干扰对实现控制目标的影响,控制律中常引入参数估计用于估计外界干扰的上界,即所谓的自适应边界估计法[18,137].
3.4 估计拓扑结构参数
在大规模的多智能体系统中,智能体间的通信拓扑结构属于全局信息,对于单个智能体而言往往很难获取.因此,依赖于拓扑结构的Laplacian 矩阵的特征值或特征向量里的元素也较难获得.在文献[21,138]中,为了实现强连通拓扑结构下的一致性,自适应技术被用于估计未知的Laplacian 矩阵左零特征向量里的元素.
3.5 自适应增益
自适应增益指控制增益的选取既不依赖于系统先验信息,也不依赖于设计者的经验,而是根据设计规则自适应地调节,因此,降低了控制系统参数调节的难度.在文献[74,139]中,为了避免控制参数的选取依赖于Laplacian 矩阵的非零最小特征值,文中采用了自适应增益技术,设计了完全分布式的事件触发一致性控制算法.类似地,在文献[18]中,为了保证闭环系统稳定性,文中在设计虚拟控制输入的增益时也采用了自适应增益技术.但该技术的不足在于自适应增益容易产生参数漂移现象.若系统存在外界干扰,则自适应增益会随时间演化逐渐趋于无穷大,从而导致智能体的控制输入趋于无穷大,最终可能导致系统破坏.为了避免参数漂移,文献[75]又在自适应增益的更新律里增加了鲁棒项.
3.6 自适应触发参数
自适应技术除了应用于一致性控制律的设计外,还能用于触发条件的设计,即2.2.2 中阐述的基于自适应技术的动态参数型触发条件.在文献[126-127,129]中,触发参数采用了自适应的更新方式,增强了触发条件对系统变化的自适应性.
虽然在多智能体系统一致性控制中自适应技术在处理不确定性方面起到了至关重要的作用,但自适应估计的存在也引发了一些问题,例如:在事件触发通信背景下,智能体的控制输入依然需要连续更新[54-56,75];在分析闭环系统稳定性时,自适应估计和系统动态有时存在耦合项,给系统的稳定性分析带来了困难[55].因此,如何将自适应技术合理地应用于多智能体系统事件触发一致性控制仍是学者们的努力方向.
4 结论
近年来,学者们围绕多智能体系统事件触发一致性控制开展了大量研究,并取得了丰硕的研究成果.为了便于聚焦事件触发一致性控制的本质问题,本文仅从事件触发条件的角度对最相关的一些研究成果进行了分类、分析和总结,但并未重点分析一些在此基础上的拓展性研究工作,例如:最优事件触发一致性控制[140-141]、量化事件触发一致性控制[142]、有限/固定时间事件触发一致性控制[143-144]等等.值得说明的是,虽然事件触发一致性控制理论经历了十几年的发展,但它仍不完善,一些开放性问题还有待深入探究.
1)虽然证明了对于给定触发状态,动态触发条件产生的下一次触发间隔时间大于静态触发条件的下一次触发间隔时间[41,118],但目前很难从理论上证明动态触发条件的最小触发间隔时间比静态触发条件的最小触发间隔时间大.此外,也没有明确的评价体系来说明动态触发条件比静态触发条件更优.
2)在自适应事件触发一致性控制中,由于自适应参数估计的引入,尽管在事件触发控制框架下,智能体的控制输入仍然需要连续更新[54-56,59,118].显然,这种控制更新方式无法降低控制输入能量.因此,在同时事件触发地通信和控制输入更新的条件约束下,如何设计合理有效的事件触发自适应一致性控制方法还有待进一步研究.
3)在实际应用中,事件检测装置的相邻两次检测行为具有间隔时间,为了保证设计的触发条件具有可实施性,明确触发间隔时间的下界值对设置事件检测装置的执行周期有指导作用.然而,现有大多数自适应事件触发一致性控制方面的文献虽然证明了触发条件不存在Zeno 现象或触发间隔时间的下界存在,但并未给出具体的下界值.因此,如何设计具有明确触发间隔时间下界的触发条件仍需深入探究.从另一角度思考该问题,若已知事件检测装置的最小执行间隔时间,并以此为约束,如何设计有效的触发条件和一致性控制律也值得探索.
4)自触发机制不依赖于事件检测装置评估触发条件,有利于降低运行和维护成本.然而,大多数基于自触发机制的一致性控制方法都建立在线性多智能体系统基础上,面向不确定非线性多智能体系统,如何设计合理有效的自适应自触发一致性控制方法仍亟待解决.
总体而言,多智能体系统事件触发一致性控制的理论研究仍处于发展阶段,除上述几方面的开放性问题外,还有许多问题值得深入思考,例如:如何在保证系统渐近收敛性能的同时设计具有鲁棒性的事件触发条件;如何在考虑通信带宽、传输速率的实际约束情况下设计事件触发一致性控制方法;如何在对抗环境下设计具有弹性的事件触发自适应一致性控制方法;基于Lyapunov 函数设计的触发条件每次触发仅为了保证系统稳定,并非为了追求更好的系统性能,因此,同时考虑系统稳定性和更好的收敛性更有意义.
