基于恒功率及功率跟随控制的增程式电动汽车研究
2022-11-01田丽媛孙光达王志豪柳敬伟
田丽媛,孙光达,王志豪,柳敬伟
长春工业大学机电工程学院,吉林长春 130012
0 引言
为尽快达成碳达峰以及碳中和的大背景下,新能源汽车的优势大于传统内燃机汽车,伴随着城市交通愈加拥堵,兼顾行驶里程和发动机工作效率,引入了三元锂离子作为动力电池的增程式电动汽车(extended-range electric vehicle,E-REV)。目前动力电池是E-REV发展的瓶颈,其寿命的长短直接影响汽车的使用年限和成本。汽车行驶时,电池频繁地充放电会使其循环寿命不断缩短,导致过早更换电池。基于这个问题,有必要对电池的衰减机制进行研究,使整车模型能够分别以两种规则型控制策略来运行,通过最优的控制策略实现对电池寿命的优化。目前,国内外众多学者对增程式电动车的控制策略以及电池寿命衰减因素有一定的研究。美国NREL试验室通过衰减试验得出动力电池的寿命与工作温度、充放电量及倍率有关,并且需要将这些因素代入电池外特性模型,得到循环寿命和日历寿命的数据,最后得到拟合函数,试验成本和时间都较高;Ramasamy等通过试验研究表明高温与低温时的充放电皆会对电池寿命衰减加剧;Vetter等总结了电池正负极的结构变化以及电解液等发生的副反应对寿命衰退的影响机制;Bloom等提出功率衰减模型;崔瑛志通过正交试验得出,充放电倍率为影响电池容量衰减的第二大因素,并对电池寿命进行多因素预测但未建立循环次数的寿命模型;张冬冬提出了Blended策略,实质为“恒功率+功率跟随”的控制思想,根据需求功率的大小和阈值作为确定控制策略的判断依据,并与动力电池紧密结合改善其寿命;牛继高等提出4种规则型控制策略,进一步通过仿真对比分析得出功率跟随控制充、放电循环更优,最优曲线、功率分流控制策略具有良好的燃油经济性,并对增程器小型化后进行硬件在环仿真验证;李永亮等提出基于典型工况统计分析的匹配设计方法进行参数匹配,采用恒功率和功率跟随控制策略进行仿真对比分析后,基于粒子群算法,进一步降低了油耗和充电电流。综上所述,目前增程式电动车在两种规则型控制策略下的电池循环次数对其寿命的影响研究不足,采用最优控制策略,减少电池循环次数,提高增程式电动车在城市工况下的使用寿命。
1 E-REV结构与控制系统模型
增程式电动汽车的构型为串联式,将发动机与发电机直连组成增程器(APU),动力系统由增程器、动力电池、控制器(MCU)、驱动电机等组成。增程式电动汽车基本结构如图1所示。由图可以看出,电驱动系统由电机与驱动桥构成,且整车中两者为力矩传递;MCU控制整车能量流动的分配;增程器与蓄电池联合为驱动电机提供所需功率。基于AVL Cruise建立正向模型,建模中主要包括整车模块、APU模块、动力电池模块、驱动电机模块以及与MATLAB-Simulink联合仿真模块,通过电气、机械连接完成能量流动以及扭矩传递,形成了一系列的闭环。
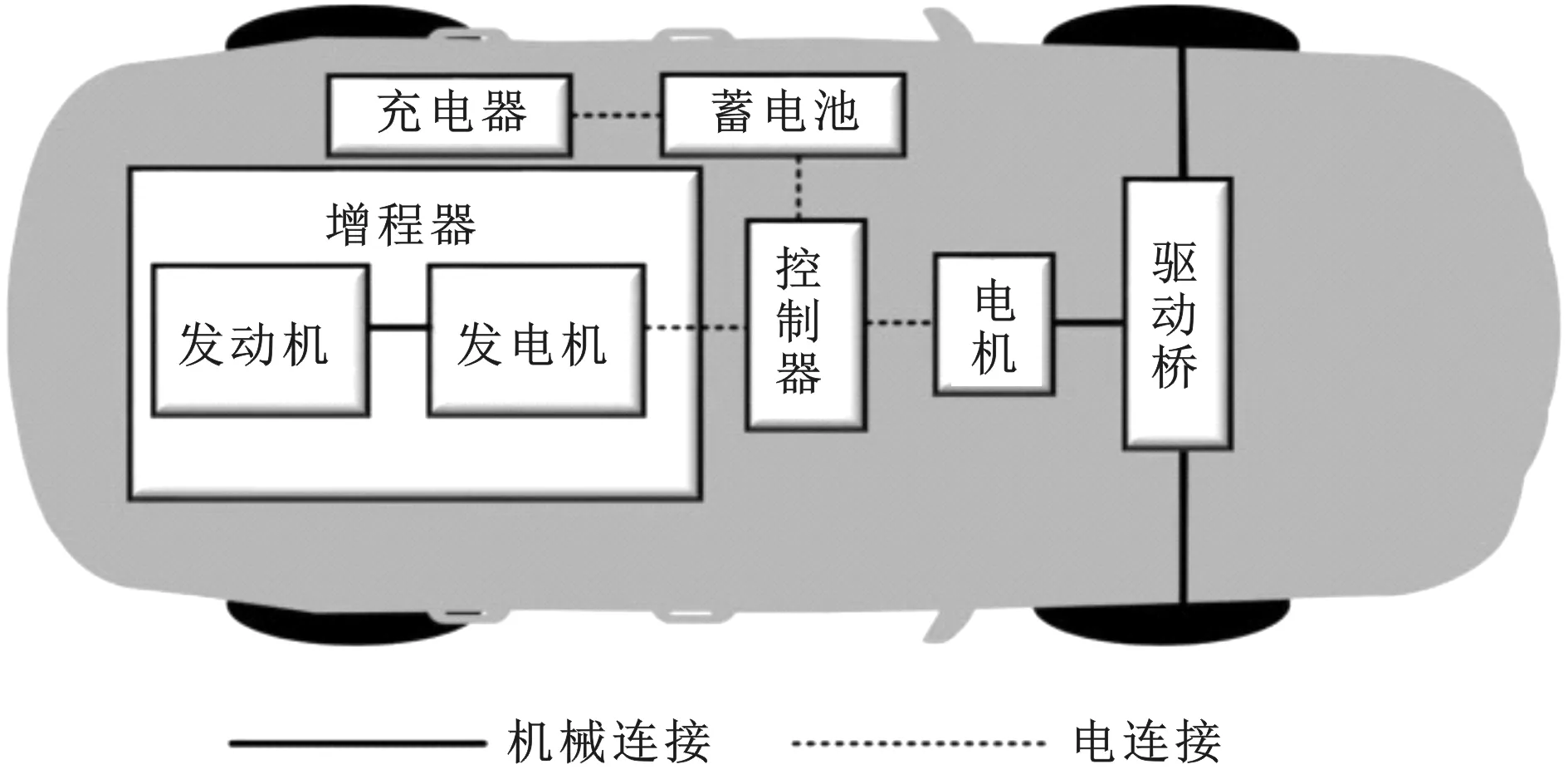
图1 增程式电动汽车基本结构
驾驶员模型可模拟油门以及制动踏板的深度,根据发动机目标转速与实际转速的差值,采用PID算法转化为百分比控制信号传给动力系统进行动力输出,从而达到对实际车速的控制。某型SUV整车参数和动力性能指标见表1,其动力系统主要参数见表2。
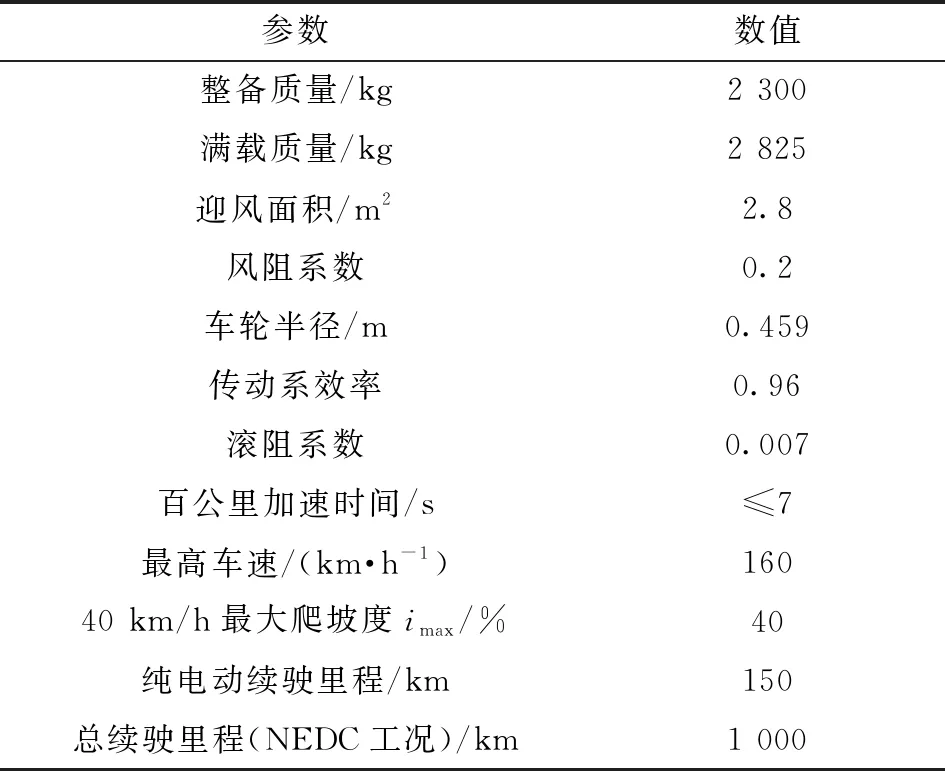
表1 某型SUV整车参数和动力性能指标
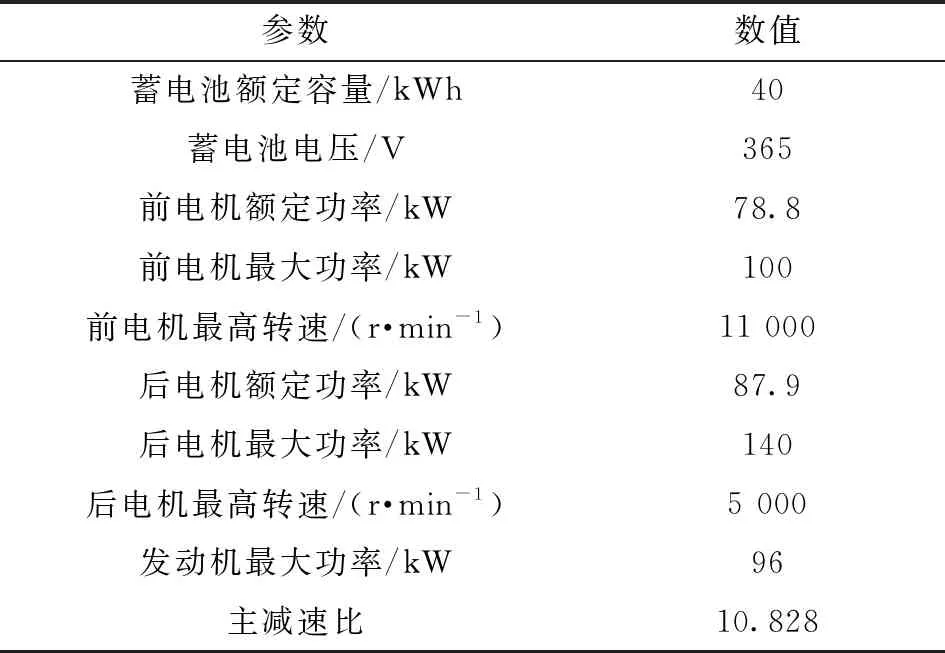
表2 动力系统主要参数
2 三元锂离子电池寿命
2.1 锂电池寿命影响因素分析
锂离子电池主要由正、负极材料、隔膜以及电解液4个部分构成。三元锂离子电池的正极材料为镍钴锰(NCM),负极为石墨,两级中间有隔膜和电解液。三元锂离子电池充放电过程如图2所示。
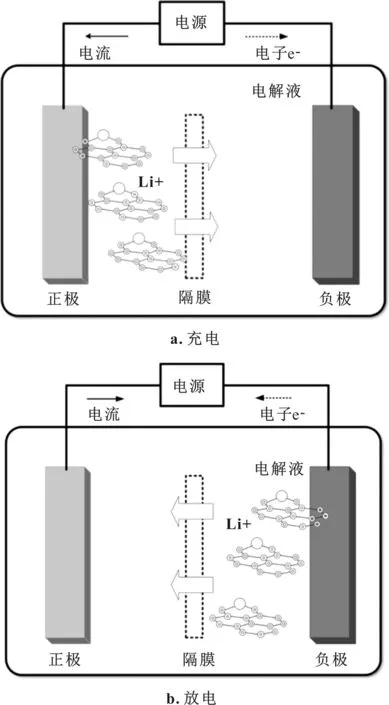
图2 三元锂离子电池充放电过程
在充电过程中,锂离子从正极活性材料中脱出流经电解液穿过隔膜嵌入至负极。与此同时,电子经过外电路流向石墨负极。在放电过程中,锂离子从石墨晶体脱出,进入电解液,穿越隔膜到正极的表面,同时电子经过外电路流向镍钴锰正极。随着锂离子电池使用周期增加后会发生容量衰减,在微观领域可总结为电极材料的嵌锂能力下降、正极材料活性物质的溶解、电池阻抗的增加和锂离子的消耗。在宏观领域影响电池寿命有多种因素,其中包括充放电倍率、温度、充放电深度、循环次数及搁置时间等。明确了电池寿命的衰减机制,不同的影响因素会相互耦合,所以控制影响因素变量十分关键。考虑电池的城市运行工况,选取循环次数因素对三元锂电池寿命进行分析。
2.2 三元锂电池循环寿命模型
根据NREL研究室的寿命模型研究以及循环测试来观察三元锂电池的容量保持率及容量变化。以电池容量作为寿命特征量的电池寿命衰减基础模型和内阻作为特征量的电池寿命基础模型,其计算公式为:
(1)
式中:为动力电池容量衰减百分比;为内阻增长百分比;为电池的使用天数,即平方为日历寿命;为循环次数,即为循环寿命;,,,,为修正函数。
由于电化学特性,在电池频繁充放电的过程中,循环特性较好的三元锂电池在不同区间的不同放电深度对寿命影响较小,在相同电流倍率以及在相同温度下进行仿真就消除了这些变量对电池的影响并且不用以容量衰减表征循环寿命衰减。电池循环寿命衰减主要由循环次数增多引起电极结构老化和负极颗粒增多,仿真车辆在未进行外部充电的情况下,行驶5个NEDC工况,计算出充、放电量,取绝对值最大者占额定容量的数值作为此次工况的循环次数,并设置电池单位循环寿命为40次。
(2)
式中:为5个NEDC工况下的电池循环次数,次;为充电量,kWh;为放电量,kWh;为电池额定容量,kWh;“1”为单位循环次数。
(3)
式中:为总循环次数;为单位循环寿命;为电池总循环寿命,次;为总行驶里程,km。
结合式(2)和式(3)可利用一次工况下的循环次数得到车辆在不同起始下的总循环寿命和行驶里程。
3 两种规则型控制策略研究及仿真对比
3.1 恒功率及功率跟随控制策略
采用恒功率控制策略时,增程器的开启或关闭由动力电池的单独决定,通过PID算法控制发动机转速为3 500 r/min,始终在最大效率点工作。图3中State=1、2、3、4分别表示当前无发电请求、以低功率发电、以中功率发电、以高功率发电,对应的输出扭矩分别为-40、-50、-75 N·m。当电池高于上限值80%时,APU关闭,车辆以纯电动模式行驶;当电池低于75%时,APU自动开启车辆进入混动模式,并开始以低功率为电池进行充电;当电池低于60%或45%时,APU继续以中或高功率为电池进行充电。
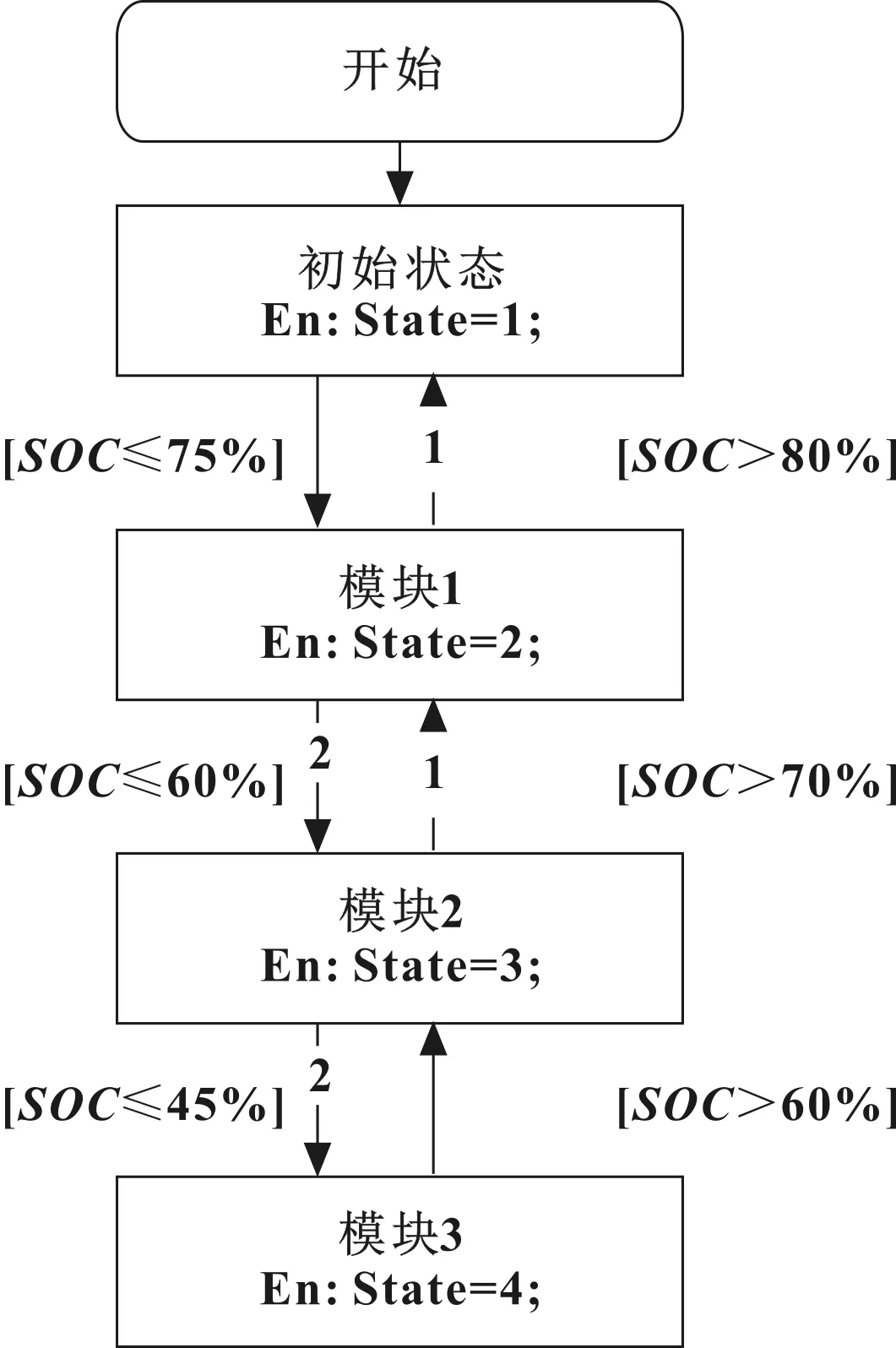
图3 恒功率控制策略下的有限状态机
图4为功率跟随控制策略。图中为设定的阈值;为整车需求功率;为电池最大放电功率;为电池放电功率;为增程器输出功率。
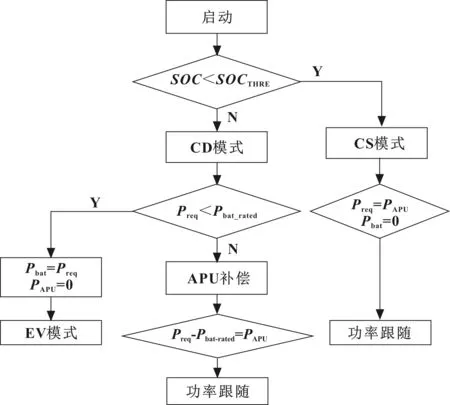
图4 功率跟随控制策略
功率跟随控制策略分为CD阶段和CS阶段,APU的输出功率由电池和需求功率共同决定。当电池电能充足时,车辆将运行在CD阶段,整车需求功率大部分时间由电池组提供,当出现>的情况时,APU会对其进行补偿。随着不断下降到设置的阈值,车辆即将运行在CS阶段,此时APU启动,为整车需求功率提供能量,电池始终保持在合理范围内波动。由于APU不断变化输出功率,能够实时为整车提供动力,减少了电池的充放电次数,提高了整车工作效率。
3.2 功率和SOC对比
为了使上述两种控制策略对电池循环次数的影响分析更具有代表性,将电池电功率、发动机功率和仿真结果进行对比。由于车辆启动后电池通常会处于一般水平,所以电池初始值不宜偏高或偏低,若偏高车辆将长时间以纯电动模式运行,偏低会使电池较快进入亏电状态,仿真结果均不显著。因此将电池起始设定两个合理值分别为76和46,即车辆开始行驶就进入混动模式。
图5和图6分别为采用恒功率和功率跟随控制策略时,5个NEDC工况下,电池电功率随时间的变化曲线。由图5可看出电池的放电功率被控制在-30 kW以内,充电功率大部分被控制在20 kW以内,波动幅度为50 kW。由图6可看出电池充放电功率被控制在-10~15 kW的范围内规律波动,波动幅度为25 kW,满足了性能要求和控制思想,有效地减弱了电池的充放电强度,有利于减小电池寿命的衰退。
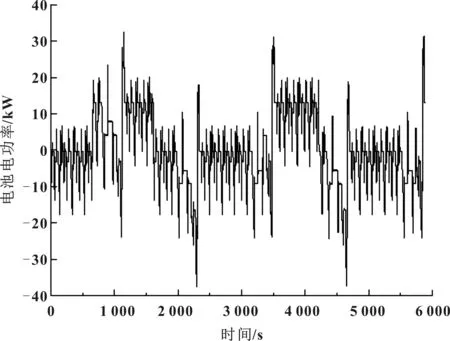
图5 恒功率控制下的电池电功率随时间的变化曲线
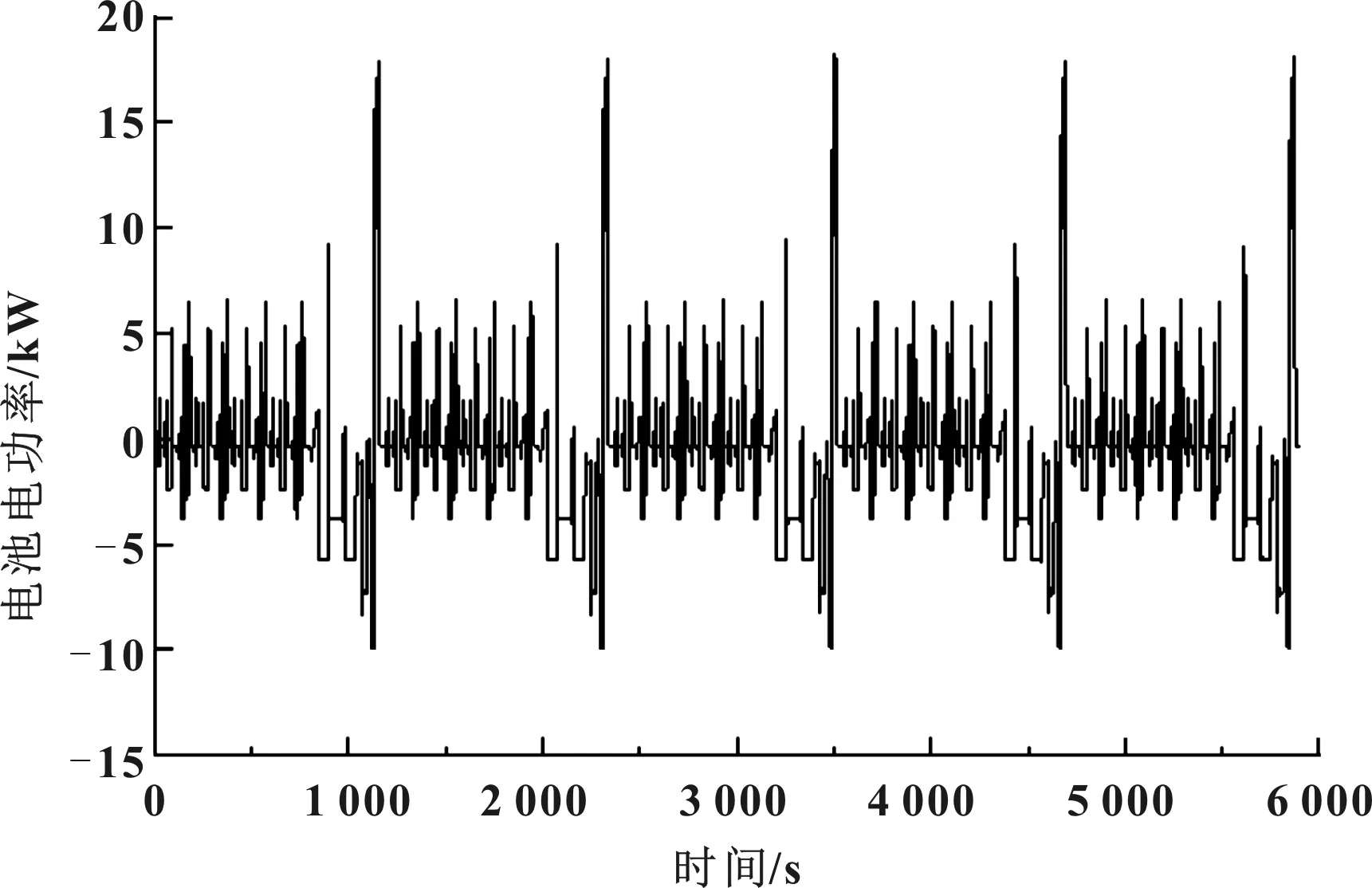
图6 功率跟随控制下的电池电功率随时间的变化曲线
图7和图8分别为采用恒功率和功率跟随控制策略时,5个NEDC工况下,车速以及电池起始为76%时随时间变化的仿真结果。由图可看出,两者的速度控制效果良好,车速都能达到120 km/h。通过两者的对比可看出恒功率具有明显的充、放电循环过程,在为75%~80%进行了两次充放电,每次均为5%;而功率跟随控制策略始终将控制在72%~76%范围内,仅4%。

图7 恒功率控制下的车速和SOC随时间变化的仿真结果
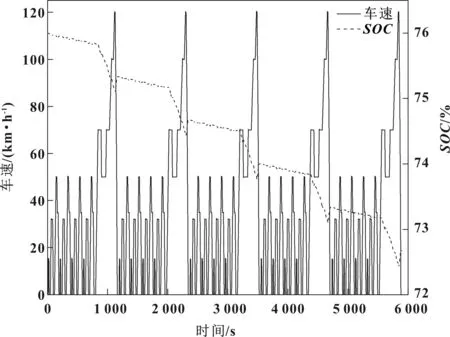
图8 功率跟随控制下的车速和SOC随时间变化的仿真结果
图9和图10分别为电池起始为46%时随时间变化的仿真结果。由图9可看出当采用恒功率控制策略运行时,增程器开启,0~3 990 s发动机功率维持在18.33 kW,2 900~4 770 s维持在14.66 kW,并且从46%升至80%,总充电34%。4 770~6 000 s,增程器关闭,进入纯电动模式,发动机功率为0 kW,从80%降至76.5%,总放电3.5%。由图10可看出当采用功率跟随控制策略时,发动机功率上下波动幅度较大,最大超过了30 kW,发动机大部分工作点分布在燃油效率较低的区域,但仅下降3.5%。
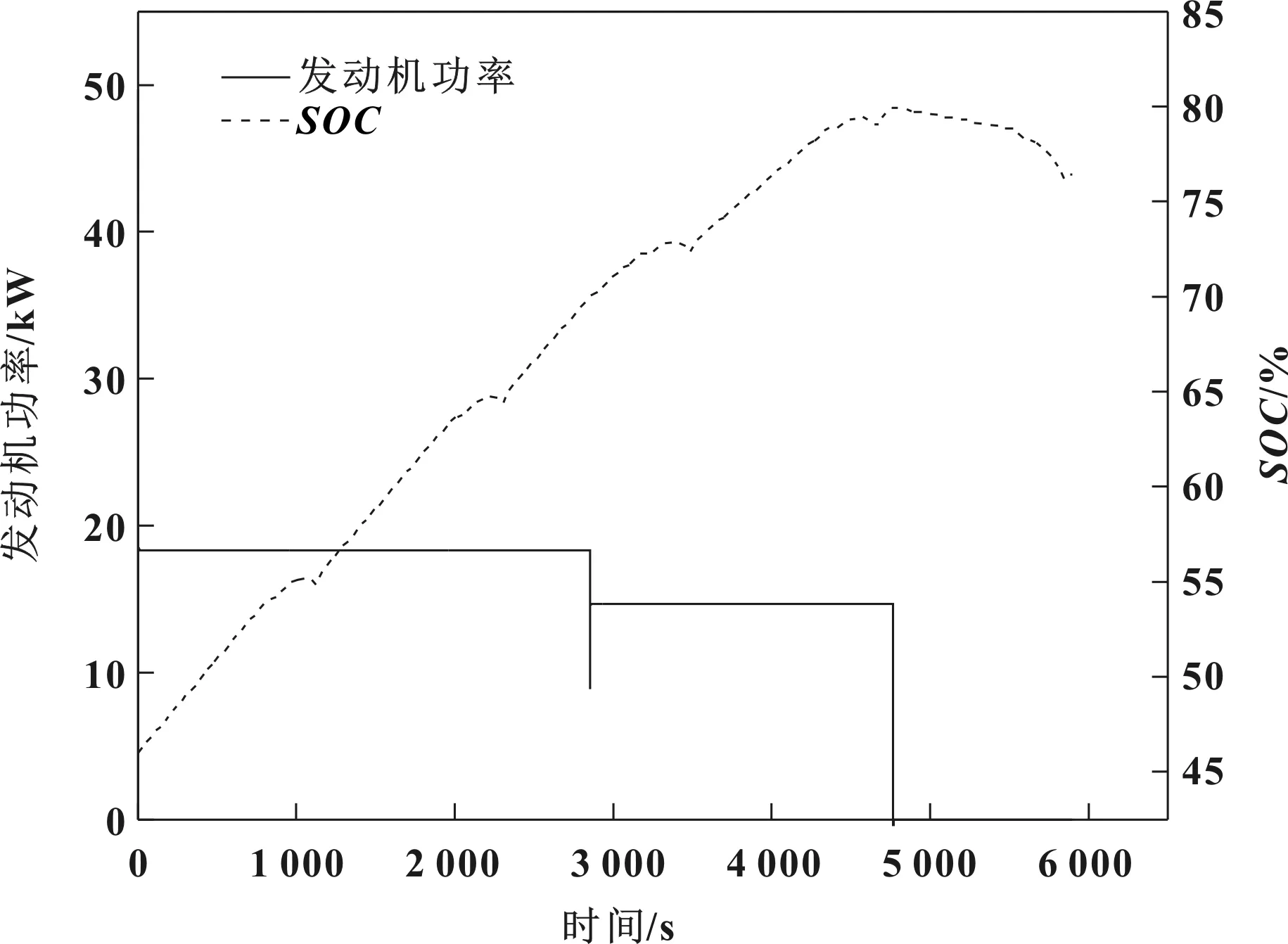
图9 恒功率控制下的发动机功率和SOC随时间变化的仿真结果
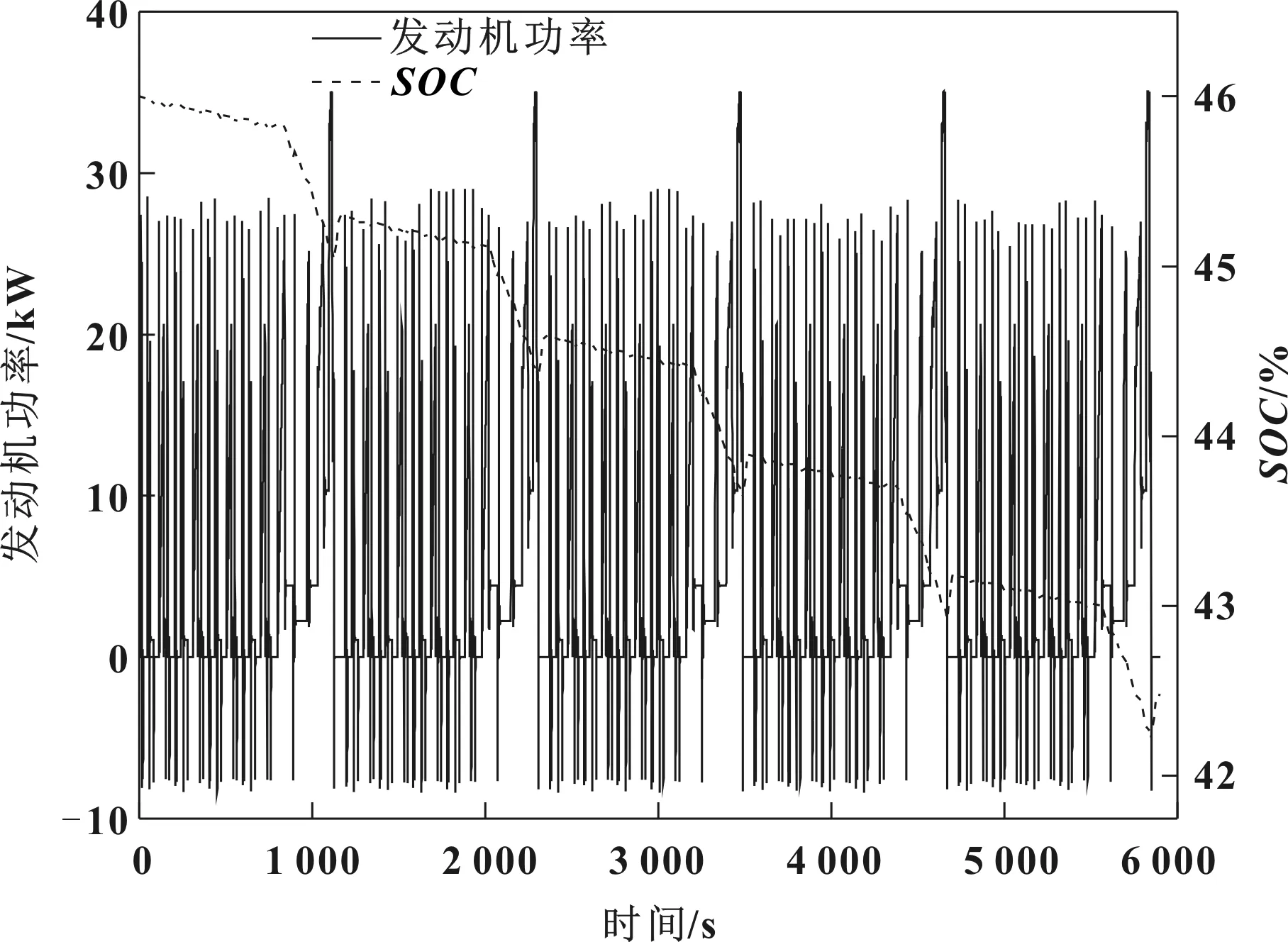
图10 功率跟随控制下的发动机功率和SOC随时间变化的仿真结果
图11为功率损失仿真对比。由图可看出,功率跟随控制策略下的电池功率损失更少,通过计算得出功率损失分别为13.41、1.86 kW,说明恒功率控制下的大量电能以其他形式消耗掉,降低了电路效率。
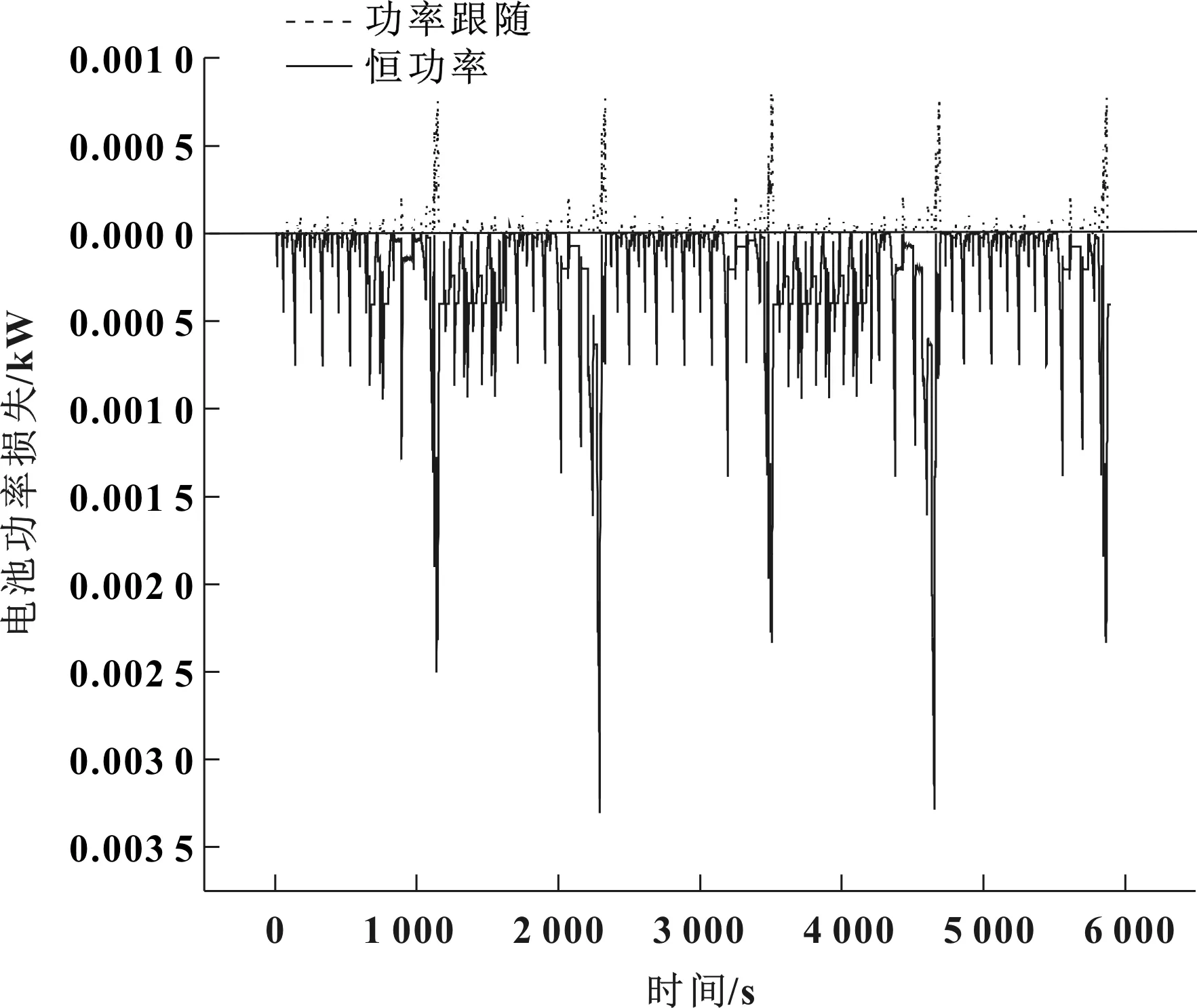
图11 功率损失仿真对比
3.3 不同起始SOC下电池循环次数对比
经过一系列的数据对比,功率跟随控制策略优势显著,在车辆运行时,增程器提供的输出功率能实时跟随车辆的需求功率,对电池的循环次数有明显的减少。表3列出了两种控制策略以及5个NEDC的工况下,通过电池循环寿命模型,对电池充、放电量及循环次数进行定量分析的仿真对比结果。
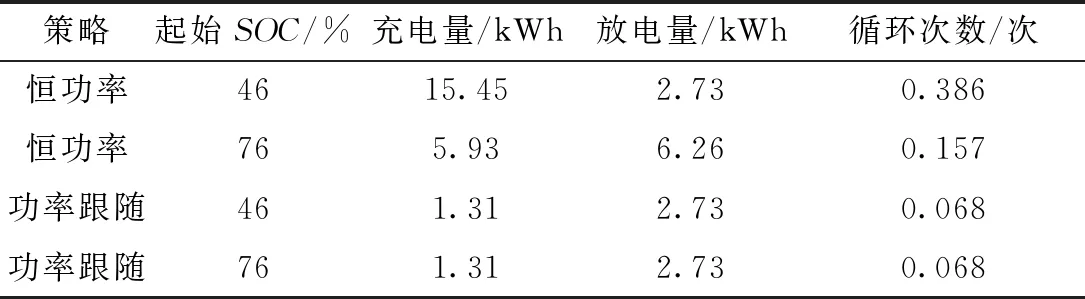
表3 仿真对比结果
表4为总循环寿命与行驶里程对比。由表可以看出:车辆行驶个NEDC工况,增程式电动汽车在恒功率控制策略下,电池在起始为46%时增程器给电池大量地充电导致电池总循环寿命仅为104次,行驶里程6 100 km,说明车辆在低电量行驶时使用这种控制策略会明显削减电池寿命。当电池起始为76%时,总循环次数和行驶里程分别为256次,15 100 km,优于起始为46%。但在功率跟随控制策略下,跟随效果较好,充、放电量较小使得电池的总循环寿命维持在586次,以及行驶里程保持在较长的34 600 km,不同的起始SOC基本不会影响电池的总循环寿命以及车辆行驶里程。
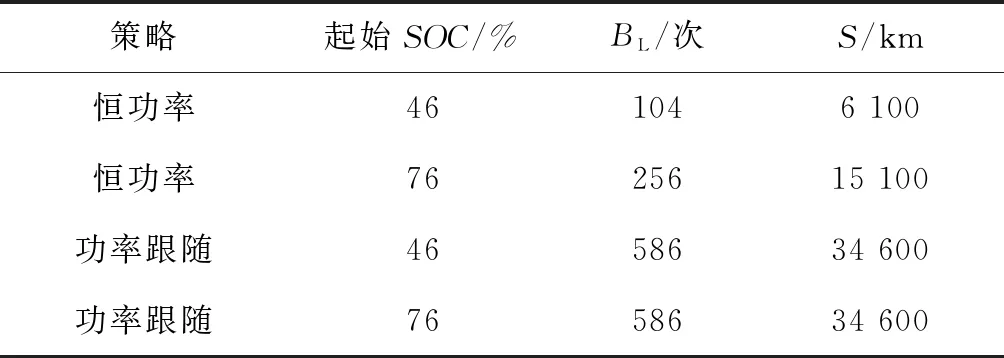
表4 总循环寿命与行驶里程对比
4 结论
(1)采用恒功率控制策略,车辆以不同的电池起始运行等公里数,低电量时增程器会更多给电池进行充放电,使电池循环次数增加;中高电量时,会相对延长电池的循环寿命。
(2)采用功率跟随控制策略,跟随效果良好,电池电功率和的波动范围较小,增程器的输出功率减少了二次转换,防止了大量的功率损失,提升了电路的效率,不同起始下充放电量保持稳定,对电池电极内部的脱落起到了良好的保护,延长了电池的循环寿命。
(3)在NEDC工况下,由于车辆频繁启停,功率跟随控制策略更适用于车辆,在电池起始为76时,总循环寿命相比恒功率增加约23倍,且适当提高电池起始,车辆的续航能力也会相对加强。
