一种智能型腿部按摩仪的设计*
2022-10-31李卓琪
李卓琪,李 娜
(长治医学院生物医学工程系,山西 长治 046000)
0 引言
随着我国人口老龄化加速,老年人易患的心脑血管、神经系统等各类疾病往往会引起偏瘫、下肢运动障碍等问题,从而导致其长期卧床。根据中国老龄办发布的“2010年度中国老龄事业发展统计公报”数据[1],到2020年中国将会有超过4200万卧床老人,总计占到老年人口总数的30%[1]。根据国家统计局的统计数据,我国老年人平均不能自理率达到8.81%,高龄患者卧床数量巨大且逐年递增[1]。长期卧床的老年患者因自身自理能力差、缺乏活动,从而易引发一系列并发症,如褥疮、肌肉萎缩、足下垂等[1]。与此同时,现代社会各种技术飞速发展,老年人在接受新产品、新技能时需要一段较长的适应时间。
鉴于以上情况,为预防老年人长期卧床引发的并发症,并考虑到老人年对新产品的认知特点,本研究旨在设计一种智能型腿部按摩仪。该按摩仪主要实现两大功能:一方面结合康复医学知识,采用物理疗法,通过老年人下肢与仪器内表面的圆弧突起物相接触,使用者能够感受到动态的按压效果;另一方面,根据使用者需求,加入腿部抬升支架和踝关节运动支架,通过支架自动化实现患肢抬高20°~30°,同时可调节脚踝角度,实现足与下肢成直角,辅助使用者下肢运动。以上功能均可通过语音操作完成。
1 整体设计方案
本设计控制部分以嵌入式单片机STM32为核心[2]。本装置可实现两大功能:主功能实现对腿部的按摩,按摩功能是通过气泵对气囊有规律地充放气,实现对小腿不同程度的挤压,从而完成按摩功能,促进腿部血液循环,防止出现静脉血栓对患者造成二次伤害。辅助功能实现腿部的抬升及脚踝的运动。通过该机械运动促进患者腿部血液流通,加速患者腿部的康复。脚踝的运动主要是以踝关节的背屈和跖屈为主,有助于减少足下垂的发生,还可改善中风、截瘫等疾病引起的踝关节变形。主功能与辅助功能均可通过语音控制实现。
2 硬件总体设计
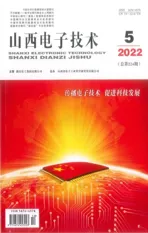
本控制系统由六个部分组成:电源模块、语音识别模块(LD3320)、主芯片STM32F429、电机、按摩模块及下肢活动模块等。首先用户发出指令,语音识别模块LD3320识别指令关键词,并进行处理分析,输出识别结果[3-4];然后将识别结果传送给主芯片STM32F429;由单片机STM32的控制选择实现按摩功能或下肢活动功能。如主控芯片识别指令为腿部按摩功能,则控制气泵对气囊有规律地充放气,从而实现对小腿不同程度的挤压,达到按摩效果;如主控芯片识别指令为下肢活动功能,则控制电机带动腿部支架进行不同角度的抬升;此外,控制脚踝支架实现脚踝的背屈和跖屈活动。硬件设计框图如图1所示。
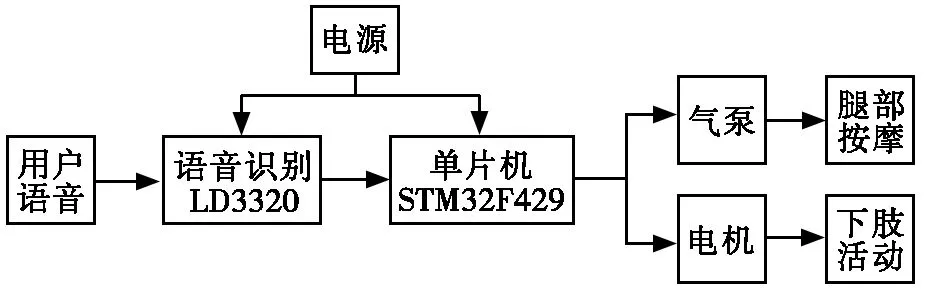
图1 系统框图
2.1 电源模块
本系统采用5 V电源供电。考虑到LD3320芯片的工作电压是3.3 V,因此,本设计采用LM337稳压芯片实现5 V电压至3.3 V电压的转换[5]。
2.2 语音识别模块
采用LD3320芯片实现语音识别功能[3]。主要由语音信号采集、识别及处理两部分组成。首先用户发出相应指令,由LD3320芯片构成的模块采集并识别“关键词”,并将结果传送给主芯片。主芯片控制外部电路完成按摩或者下肢活动等功能。LD3320芯片语音识别原理[3-6]如图2所示。

图2 LD3320语音识别原理图
2.3 下肢活动控制模块
1) 电动舵机
电动舵机系统为位置伺服系统,通过接收主芯片发送的控制指令,经过与实际位置反馈做差,其误差信号经过PID控制器计算,并将结果输出给功率放大电路的电机驱动模块,驱动电机旋转。为了防止电枢电流过大,在实际应用中对PWM信号的占空比输出进行限制,其系统控制原理框图如图3所示[7-9]。
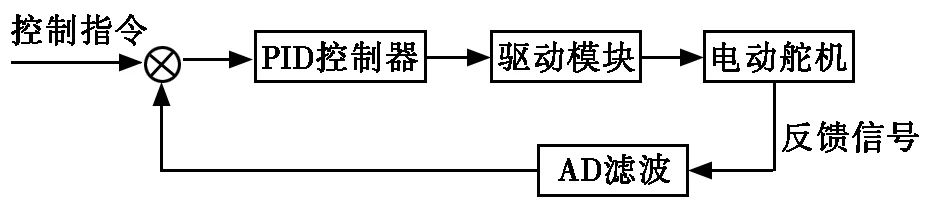
图3 舵机控制原理框图
由于本设计需要实现抬升患者小腿的功能,所以选取的舵机力矩不能太小。本文采用DSS-M15S舵机,该舵机更加稳定可靠,能够百分百达到所标定的参数性能,具备力矩大、抖动小、散热好,能够在高负载下长期工作的能力,基本符合本研究需求。
2) 机械抬升装置
该装置用于抬升腿部,包括用于支撑腿部的半圆柱型护板、电机以及其它的辅助支架。通过主芯片STM32F429产生的PWM信号驱动电机,带动支架运动,进而促使腿部抬升[10-11],其工作原理如图4所示。

图4 机械控制原理框图
2.4 按摩模块
腿部按摩模块利用STM32嵌入式单片机控制气泵充气与泄气,从而实现按摩及定时的功能。具体实现过程如图5所示。利用单片机一方面控制气泵对气囊进行充气和泄气;另一方面控制充气与泄气的速度或者时间,以实现不同程度的按摩强度及按摩时间[12]。

图5 按摩模块原理图
3 系统软件设计
系统软件设计的主流程图如图6所示。首先初始化主控芯片,其次通过接收语音信号,识别指令,对其余模块进行设置。通过语音识别模块(LD3320芯片)识别用户输入的指令性语言,进而选择是否实现按摩功能或者下肢活动功能。其中,语音识别的部分代码如下:
void LD3320(void){
u8nAsrRes=0;
While(1){
switch(nAsStatus){
caseLD_ASR_RUNING;
caseLD_ASR_ERROR;
caseLD_ASR_NONE;
nASRStatus=LD_ASR_RUNING;
If(RunASR()==0){nAsrStatus=LD_ASR_ERROR;
Break;
}
caseLD_ASR_FOUNDOK:nAsrStatus=LD_getResult();
printf(“ 识别码:d%”,nAsrRes);
}
图6 系统软件设计的主流程图
4 测试与结论
本设计采用STM32单片机,实现腿部的按摩主功能以及腿部抬升及脚踝运动的辅助功能。使用者可根据自身需求自行选择功能模块。采用该按摩仪进行测试,接通电源后,测试者选择按摩功能模块,通过语音输入按摩强度为中,按摩时长为20 min,测试者腿部能感受到明显的挤压按摩;选择下肢运动功能模块,语音输入或手动控制腿部抬升20 cm,抬腿时长10 min;同时可自行设定抬腿次数。通过按摩仪的测试,帮助老年患者自行锻炼腿部,且本设计稳定性好,下肢腿部抬升的高度及踝关节的运动角度均可根据老年人的实际需求自行调节,以实现使用的智能化及舒适度。