电厂汽轮机高中压转子振动突变故障识别研究
2022-10-31曾娜
曾 娜
(安徽电气工程职业技术学院 动力工程系,安徽 合肥 230051)
随着人们生产及生活用电需求的不断增加,各大电厂实现了飞速发展.汽轮机作为一种耦合机、电、液的复杂系统,能够将锅炉输送过来的蒸汽热能转化成机械能,是电厂最为重要的大型旋转机械设备之一[1].由于汽轮机常处于高温、高转速的工作环境,部件所受外力作用极大,加之汽轮机结构日趋复杂,导致其故障率持续上升[2].汽轮机高中压转子振动是影响汽轮机安全稳定运行的主要因素,若振动值发生突变,并超出正常范围,极可能造成汽轮机出现不同程度的故障,甚至引发其他相关设备的连锁故障,在严重损害电厂经济效益的同时,还会因大范围突发性停电而直接影响人们的正常生活和工业生产[3-4],因此研究电厂汽轮机高中压转子振动突变故障识别方法越发受到人们的重视.
当前很多专家和学者均对该课题展开一系列研究,例如石志标和杨新等人,分别利用排列熵与IFOA-RVM相结合的方法,以及多特征提取与核极限学习机相结合的方法识别电厂汽轮机高中压转子振动突变故障[5-6].这两种方法的计算复杂度较低,且故障识别稳定性优良,但难以快速识别程度较小的故障.
针对该问题,本文将电厂汽轮机高中压转子振动突变故障特征作为基础,利用小波包分析结合改进的径向基函数(Radical Basis Function
,RBF)神经网络实现故障识别,以期为及时发现并解决电厂汽轮机高中压转子振动突变故障提供有效的技术支持.
1 电厂汽轮机高中压转子振动突变故障识别
1.1 电厂汽轮机高中压转子振动突变故障信号采集
电厂汽轮机型号通常为D5TC2F42,其轴系包含高中压、低压以及发电机3种转子,每个转子的支撑和连接形式分别为双支撑、刚性连接,轴承数量共6个,其中3个轴瓦属于可倾瓦,分别用#1、#2、#3表示,其余3个轴瓦为短椭圆瓦,分别用#4、#5、#6表示.该电厂汽轮机的轴系结构具体如图1所示.
假设电厂汽轮机轴承中分面左45°方向为X向,右45°方向为Y向,当电厂汽轮机高中压转子发生振动突变故障时,其轴系会呈现出以下振动特点:
(1)3Y、4X向轴振出现波动的同时,还会伴随着突发性振动增大情况,此时振动激发快,且振幅起伏变大;
(2)在电厂汽轮机处于低负荷、高真空工况下,#3和#4轴瓦出现振动突增现象,同时振幅波动频率显著升高[7-8];
(3)当电厂汽轮机高中压转子的突发性振动发生时,频谱内将产生3~23 Hz的连续谱,振动主频率处于19~20Hz的低频状态;
(4)电厂汽轮机的转速较低时,#3轴瓦的轴振仍处于较高数值.
将一体化电涡流位移传感器布设于电厂汽轮机汽机前轴瓦、汽机后轴瓦、发电机前轴瓦,根据上述电厂汽轮机高中压转子振动突变故障时的轴系振动特点,利用该传感器从不同测点采集电厂汽轮机高中压转子振动突变故障信号,将其经过电源及信号偏置后传输到PCB信号调理板实现放大与滤波处理,运用A/D板将处理后故障信号转换为数字信号,并输入到计算机以供相关技术人员进行故障信号分析,具体过程用图2描述.
1.2 基于小波包分析的特征提取方法
依据采集的电厂汽轮机高中压转子振动突变故障信号,通过小波包分析从中提取故障特征.小波包函数分解法可以同时分解每个分解层的高频与低频区域.利用小波包基展开电厂汽轮机高中压转子振动突变故障信号时,其由低通和高通滤波两部分构成[9-10],在每次分解过程中,需要将上层次序为n的频带深入细化为下层次序分别为2n和2n+1的两个子频带.
采用公式(1)描述电厂汽轮机高中压转子振动突变故障信号的小波包分解过程:
(1)
式中,平移参数用l、k描述;小波包系数用dl(j,2n)、dl(j+1,n)描述;尺度和频率参数分别用j、n描述;低通滤波器组用ak描述;高通滤波器组用bk描述;当k的取值为0或1时,dk(j+1,n)分别代表尺度函数和小波函数.
小波包的重构过程用公式(2)表示:
(2)
式中,完成重构的小波包系数用dl(j+1,n)描述;重构后低通滤波器组用pl-2k描述;重构后高通滤波器组用ql-2k描述.
电厂汽轮机高中压转子振动突变故障信号用f(x)描述,根据Parseval能量积分等式[11],可以获得公式(3)所示时域内f(x)的能量表达式:
(3)
电厂汽轮机高中压转子振动突变故障信号的小波变换过程如公式(4)所示:
dx,
(4)
式中,基小波用φ(x)描述.通过Parseval恒等式将以上两个公式联系起来,可得到公式(5)所示结果:
(5)
式中,小波变换系数用d(j,k)描述,将其当作元素构造电厂汽轮机高中压转子振动突变故障特征向量,具体用公式(6)描述:
T=[E1,E2,…,EM],
(6)
在能量较大的情况下,E(j,k)的数值一般比较高,因此需对其进行归一化处理,以方便数据分析,进而获得公式(7)所示小波包提取的电厂汽轮机高中压转子振动突变故障特征向量[12-13]:
e=E1,E2,…,EM/E(0,0).
(7)
1.3 基于人工鱼优化RBF神经网络的故障识别方法
将1.2小节提取的电厂汽轮机高中压转子振动突变故障特征向量e作为输入量,将9种常见故障类型作为输出量,使用RBF神经网络识别电厂汽轮机高中压转子振动突变故障,并利用人工鱼群算法对RBF神经网络进行优化,以提升该网络的收敛速度与寻优精度.
1.3.1 RBF神经网络
RBF神经网络由输入层、隐含层和输出层构成,每层的节点数量分别用n、q、m描述.隐含层节点的变换函数一般采用高斯函数[14-15]表示,具体为φ(δ)=exp(-δ2/B2),其中神经元宽度用B描述,函数中心向量用δ描述.隐含层各节点均存在一个RBF中心向量,用Ck=[Ck1,Ck2,…,Cki,…,Ckn]T描述,其中k的取值范围介于[1,q]之间.
RBF神经网络中Ck的个数与隐含层节点个数相同,该网络可以将电厂汽轮机高中压转子振动突变故障特征向量地输入到各隐含层节点,假设隐含层节点用δk描述,定义的输入模式用X=[X1,X2,…,Xi,…,Xn]T描述,其距离δk地RBF中心向量的欧几里得范数计算过程用公式(8)描述:
(8)
式中,隐含层节点的RBF中心向量中次序为i的分量用Cki表示,可使用公式(9)描述变换后各隐含层节点的输出结果:
(9)
式中,k的取值介于[1,q]范围内;非线性高斯函数用φ(·)描述;B表示实常数.
RBF神经网络的输出为上式结果的加权和,具体如公式(10)所示:
(10)
式中,j的取值介于[1,m]范围内;对于隐含层节点j,其输出权向量用WJ=[Wj1,Wj2,…,Wjk,…,Wjq]描述;隐含层的输出列向量用Z=[Z1,Z2,…,Zk,…,Zq]T描述.定义误差函数E,其计算过程如下所示:
(11)
式中,网络的期望和实际输出分别用yq、ys描述.
1.3.2 基于人工鱼群算法的RBF神经网络优化
(1)设置人工鱼群的群体大小为s,迭代次数最大值为n,人工鱼的移动步长和可视域分别用st、vt表示;拥挤度因子用δ表示,初始权值用wij(0)表示.
(2)利用E实现每个人工鱼目前位置食物浓度的定义,表示为FC=1/E,将最大FC的人工鱼放入公告板.
(3)人工鱼可视域的伙伴中心位置用ci描述,在对其进行初始化的基础上采用最近邻规则划分输入的电厂汽轮机高中压转子振动突变故障特征向量样本,并依据样本的均值调节中心,循环上述过程,停止条件为中心分布不再发生改变.
(4)每个人工鱼需要分别对追尾与聚群行为进行模拟,并执行模拟后较大FC值的行为,缺省行为选择觅食行为.
(a)使用式(12)描述觅食行为的权值学习形式:
(12)
式中,人工鱼状态的参数矩阵用{wij}描述,其中不同状态的i行j列的元素用wij(j)、wij(i)、wij(i+1)描述,[0,Step]随机数用random(Step)描述.
(b)聚群行为的权值学习形式.人工鱼目前状态用Xi描述,获取可视域中伙伴数量nf构成集合KJi,若该集合非空,则从中寻找中心位置,同时搜寻可视域中的人工鱼,搜寻完毕后求解该中心的食物浓度FCc,当FCc/nf>δFCi时,需要执行公式(13),若以上集合为空集,需要执行觅食行为.
wij(i+1)=wij(i)+random(Step)(wij
(center)-wij(i))/di,center,
(13)
(c)追尾行为.查找可视域中的最大伙伴Xmax,当FCmax>δFCi时,需要执行公式(14),如果可视域中不存在伙伴,需要执行觅食行为.
wij(i+1)=wij(i)+random(Step)(wij(max)-wij(i))/di,max.
(14)
(5)比较各人工鱼每次行动后的当前状态与公告板中状态,若当前状态更佳,则进行替换.
(6)如果迭代次数达到最大值,将公告板的FC值输出,否则迭代次数加1并跳转到过程(4).
(7)将提取到的故障特征作为输入量输入优化后的RBF神经网络中,输出电厂汽轮机高中压转子振动突变故障类型识别结果.
2 结果分析
将1.1小节中的D5TC2F42型电厂汽轮机作为实验对象,测试质量不平衡、转子热弯曲、转轴不对中、转动部件飞脱、动静碰磨、汽流激振、结构共振、结构刚度不足、转子裂纹等9种常见电厂汽轮机高中压转子振动突变故障,将故障信号采样频率设置为1 800 Hz,使用本文方法采集以上9种故障信号与正常状态信号各50组数据,并完成故障特征提取和故障识别.
使用本文方法的小波包分析分解并重构汽流激振故障信号,获得的4个频带波形用图3描述.
从图3可以看出,本文方法能很好地分解并重构电厂汽轮机高中压转子振动突变故障信号,所得波形完整连续,且不存在噪声,能有效反映各频带的信号特点,信号质量较高,有助于提升后续故障特征提取效果.
依据上述形式获取其余8种故障信号的频带波形,并计算相应的能量分布,归一化处理后便能获得表1描述的各故障信号特征.
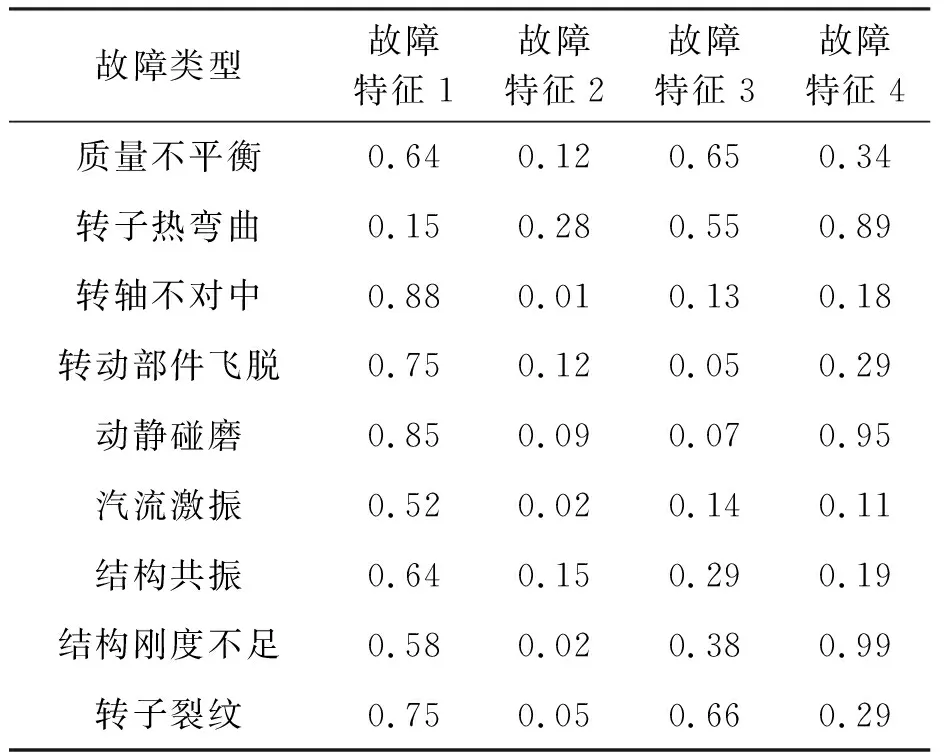
表1 电厂汽轮机高中压转子振动突变故障特征
将表1内故障特征作为本文方法的输入量,用于识别采集的各类电厂汽轮机高中压转子振动突变故障样本,使用A~J字母分别标记9种故障类型和正常状态.不同故障程度下,本文方法的故障识别结果与实际结果用图4描述.
从图4可以发现,本文方法的故障识别结果与实际结果完全相同,表明本文方法具有较好的电厂汽轮机高中压转子振动突变故障特征提取效果和故障识别能力,即使在故障程度很低的情况下仍能表现出理想的故障识别性能.
比较本文方法使用前后的各类型电厂汽轮机高中压转子振动突变故障概率,以进一步验证该方法的故障识别效果,结果见图5.
从图5可以看出,本文方法使用前的各类型电厂汽轮机高中压转子振动突变故障概率均处于较高数值,最高与最低故障概率分别约为88%和40%;本文方法使用后的各类型故障概率明显降低,且始终低于10%.以上结果表明,本文方法具有较优的电厂汽轮机高中压转子振动突变故障识别效果,能有效减少电厂汽轮机运行过程中的高中压转子振动突变故障,使其安全性能显著提升.
3 结 论
为解决电厂汽轮机结构复杂和特殊工作环境造成的故障频发问题,提出电厂汽轮机高中压转子振动突变故障识别方法.该方法利用小波包分析提取的故障特征能很好地用于故障识别,因此所得结果与实际故障相同,并且该方法能准确识别故障程度较低的故障,有效弥补了已有方法存在的不足,原因在于该方法使用人工鱼群算法优化RBF神经网络,可极大地提升网络的收敛速度和寻优精度.日后可进一步研究最优小波包基的自适应选择问题,以不断提升电厂汽轮机高中压转子振动突变故障识别性能.
