基于Prescan 自动紧急制动系统分级控制策略研究
2022-10-31尤本隆
尤本隆
(200093 上海市 上海理工大学)
0 引言
自动紧急制动系统(Autonomous Emergency Braking,AEB)是一种高级辅助驾驶系统。在碰撞危险发生之前,发出预警信息,若驾驶员未采取任何措施,则系统主动介入并进行制动,避免或减轻碰撞对驾驶员和其他交通参与者造成的伤害。欧盟新车安全评鉴协会(Euro-NCVP)研究结果表明,AEB 系统的普及可有效避免27%的车辆碰撞事故[1],2021 年最新中国新车评价规程(C-NCAP)发布了主动安全ADAS 系统试验方法,车辆追尾自动紧急制动(AEB CCR)作为其第一个试验场景显得尤为重要。
目前国内外研究人员已提出众多的AEB 系统算法模型,其中几种比较典型的控制策略有安全距离模型、碰撞时间模型、最小减速度模型、驾驶员主观感受模型等[2]。Kodaka[3]等基于日本交通事故数据统计开发了一种带三级制动的避撞策略;Wada[4]等基于专业驾驶员的紧急制动特征对AEB 的介入策略进行了研究。但由于国外的交通环境和驾驶员的驾驶行为习惯较国内差异较大,因此不能直接套用国外已有的研究成果。
据此,本文提出了一种基于有限状态机的分级预警和制动控制策略,详细介绍了TTC 模型,建立了自己的安全距离模型,并将TTC 模型和安全距离模型综合应用在AEB 系统控制策略中,针对C-NCAP(2021 版)新发布的AEB CCR 避撞评价指标,在Prescan 中搭建主动安全测试场景,建立了包括制动压力控制模型和节气门开度控制模型的车辆逆动力学模型;最后通过软件联合仿真对提出的自动紧急制动控制策略进行了验证分析。
1 碰撞时间模型(TTC)和安全距离模型
碰撞时间(Time To Collision,TTC)指的是相同路径上两车维持自身车速同向行驶,直至发生碰撞所需要的时间,其计算公式如下:

式中:dr——两车相对距离,m;vr——两车相对速度,m/s。
本文中dr和dv由Prescan 中的TIS(Technology Independent Sensor)传感器测得,计算出实时TTC 值。碰撞时间模型公式简单,应用广泛,但是在某些特殊工况下不适用。因此提出了相对加速2 阶TTC 公式[5],其计算公式如式(2):

式中:ar——两车相对加速度,m/s2。
本文选取第1 种TTC 模型(式(1))作为AEB 主动介入的判断条件,但是在某些特殊工况下只依靠此碰撞时间模型也会造成问题。例如当自车以20 km/h 行驶,前车静止时,AEB 会过早地介入,导致自车被刹停后距离目标车辆过远。虽然AEB 系统成功避撞,但是也对驾驶员正常行驶造成干扰。众多的AEB 控制策略中,另一种常用的是安全距离模型,因此本文将碰撞时间模型和安全距离模型结合,在预警策略中采用TTC 模型,制动策略中采用安全距离模型。安全距离模型是以汽车制动过程中的运动学为基础,制动临界距离(db)计算公式如式(3):

式中:v0——自车速度,m/s;a——制动策略所决定的减速度,m/s2;ε——系统参数。
2 AEB 系统分级预警/制动策略设计
2.1 AEB 介入方式制定
为保证驾驶员的主动控制权,本文前方碰撞预警功能(Forward Collision Warning,FCW)采用二级预警方式。在紧急工况下,若直接采用高强度制动,会影响驾驶员的乘坐舒适性,因此在AEB 介入后,采取两级制动策略,以此改善紧急状况下的乘坐体验和保证行车安全。
AEB 系统的分级预警/制动总体方案如图1所示。其中,一级预警为指示灯预警;二级预警为指示灯、蜂鸣器联合预警,并在二级预警触发时刻增加点刹报警。
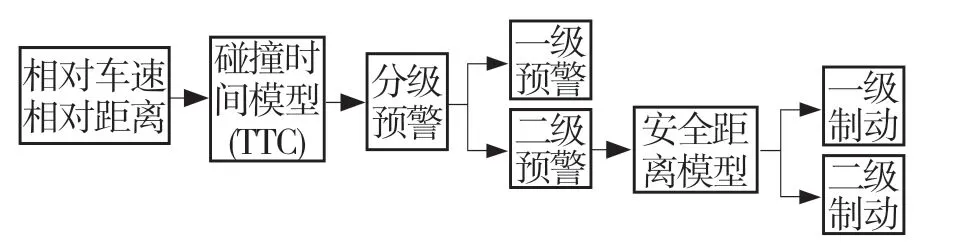
图1 分级预警/制动方案Fig.1 Hierarchical warning/braking scheme
2.2 分级预警/制动关键参数确定
碰撞时间模型根据不同行驶工况来设置不同的碰撞时间阈值,当求得的二车预碰撞时间小于安全阈值时AEB 系统介入。相关研究对不同安全时间阈值和不同制度强度下对应的事故避免率进行了总结:若驾驶员在碰撞前1.8 s 以0.5 g 的减速度制动,能够避免95%的碰撞事故;文献[6]对意外中驾驶员反应时间进行了分析:在采用图像、声音联合预警时,驾驶员反应时间的平均值约为0.9 s,制动器延迟时间一般取0.2 s。
综合考虑,本文预警策略一级预警的TTC安全阈值为3.0 s;二级预警根据自车车速设置安全阈值:车速小于30 km/h,TTC 阈值为2.5 s;车速在30~50 km/h 之间,TTC 阈值为2.6 s;车速在50~70 km/h 之间,TTC 阈值为2.7 s;车速大于70 km/h,TTC 阈值为2.8 s。
NHTSA 随机提取80 多名驾驶员在紧急制动过程中车辆的减速度值[7],通过对紧急制动过程中最大减速度和平均减速度值分析,驾驶员整体减速度平均值为0.38 g,最大减速度为0.72 g。本文制动策略一级制动时的制动强度取0.4 g,二级制动时的制动强度取0.8 g。其中在二级预警中触发的点刹强度为0.6 g。
2.3 分级预警/制动策略设计
确定了分级预警TTC 安全阈值和分级制动制动强度后,设计AEB 系统分级预警/制动算法流程图,如图2 所示。由流程图可知:

图2 AEB 分级预警/制动策略流程图Fig.2 Flow chart of AEB hierarchical warning/braking strategy
(1)当TTC ≤3.0 s 时,指示灯亮起预警,提醒驾驶员做出反应;若驾驶员未介入且当TTC ≤t0时,指示灯和蜂鸣器联合预警,并进行点刹预警,此处t0即前文提到的系统二级预警TTC 安全阈值。其中,点刹预警在激活时根据自车车速判断,车速越高制动时间越长;
(2)若驾驶员仍未介入,且当两车相对距离小于系统设定的安全距离d0,此时自动紧急制动系统介入,进行一级制动;当两车相对距离达到制动临界距离d1,即式(3)中的db,进行二级制动;
(3)若驾驶员介入,则AEB 系统退出;当EBA(Electronic Brake Assist)检测到驾驶员所提供的制动压力无法避撞时,进行制动辅助。
3 AEB 系统控制器设计
3.1 有限状态机建模
有限状态机是描述有限的状态、触发事件及转换行为的数学模型[8],能对AEB 系统的不同状态和状态之间的切换关系进行建模,清晰地表达复杂的逻辑关系。根据本文提出的AEB 分级预警/制动流程图,在MATLAB/Simulink 中采用Stateflow 模块进行建模,如图3 所示。
图3 的AEB 控制器中,基于碰撞时间(TTC)模型、安全距离模型及两车相对距离dr、相对车速vr,实时决策AEB 系统采取不同的预警等级和制动等级。

图3 AEB 控制器Fig.3 AEB controller
3.2 车辆逆动力学模型
以Prescan8.5.0 软件自带车型Audi_A8 为研究对象,使用其默认参数设置。主要参数如表1所示。
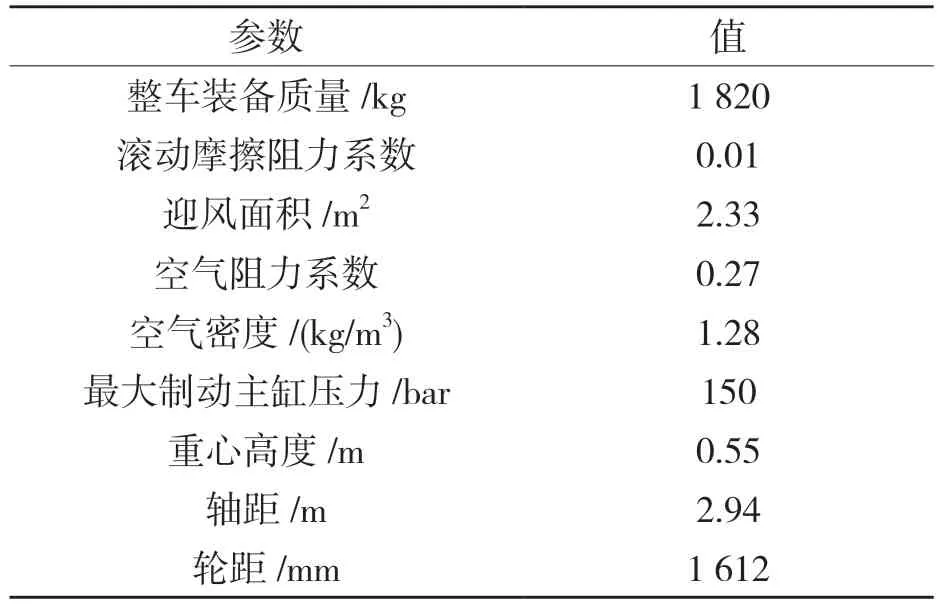
表1 整车和环境主要参数Tab.1 Main parameters of vehicle and environment
3.2.1 制动压力控制模型
根据车辆动力学方程,车辆在平直公路上制动时没有坡度阻力和加速阻力,得到式(4):

式中:m——车辆质量,kg;FXb——地面制动力,N;G——车辆重量,N;f——滚动阻力系数;CD——空气阻力系数;A——车辆迎风面积,m2;ρ——空气密度,kg/m3。
车辆进行制动时,引入比例系数Kb表示制动力FXb和制动压力P的比值[9],其关系如式(5):

在Prescan 中设置车辆以某初速度行驶,然后施加恒定的减速度,运行模型可得到车辆制动压力大小,将其代入式(5)计算出Kb的值,在本文中,该值为119。
Simulink中搭建制动压力控制模型如图4 所示。
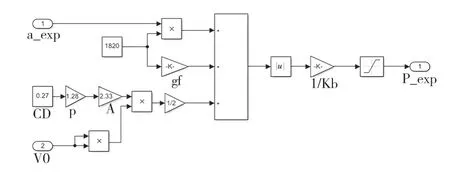
图4 制动压力控制模型Fig.4 Brake pressure control model
3.2.2 节气门开度控制模型
本文研究对象是车辆自动紧急制动系统,自车没有加速需求,因此在仿真过程中只需要在AEB 系统输出加速度为0 时,节气门开度保持在能够使自车维持当前速度行驶状态即可。因此在Prescan 中设置车速从0 到120 km/h 的测试工况,步长为10 km/h,运行测试模型得到维持不同车速时所对应的节气门开度值,如图5 所示。将Prescan 测试工况中的车速和其对应的节气门开度值导入Simulink 中的1-D Lookup Table 模块中,实现节气门开度控制功能建模。
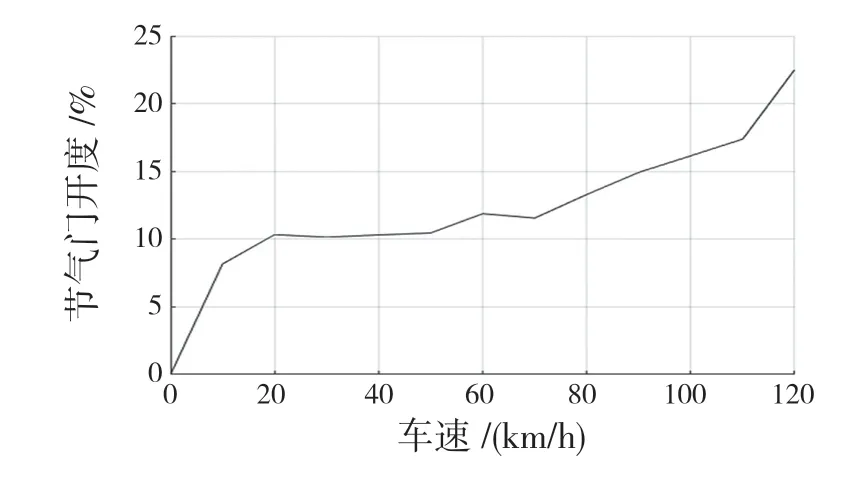
图5 不同车速节气门开度Fig.5 Throttle opening at different speeds
4 AEB 系统仿真分析
4.1 联合仿真平台
本文使用Prescan8.5.0 和MATLAB/Simulink R2018b 进行联合仿真。如图6 所示,将搭建的AEB 算法模型、逆动力学模型和Prescan 自带的TIS 传感器模型、车辆动力学模型连接起来构成本次研究的仿真平台。
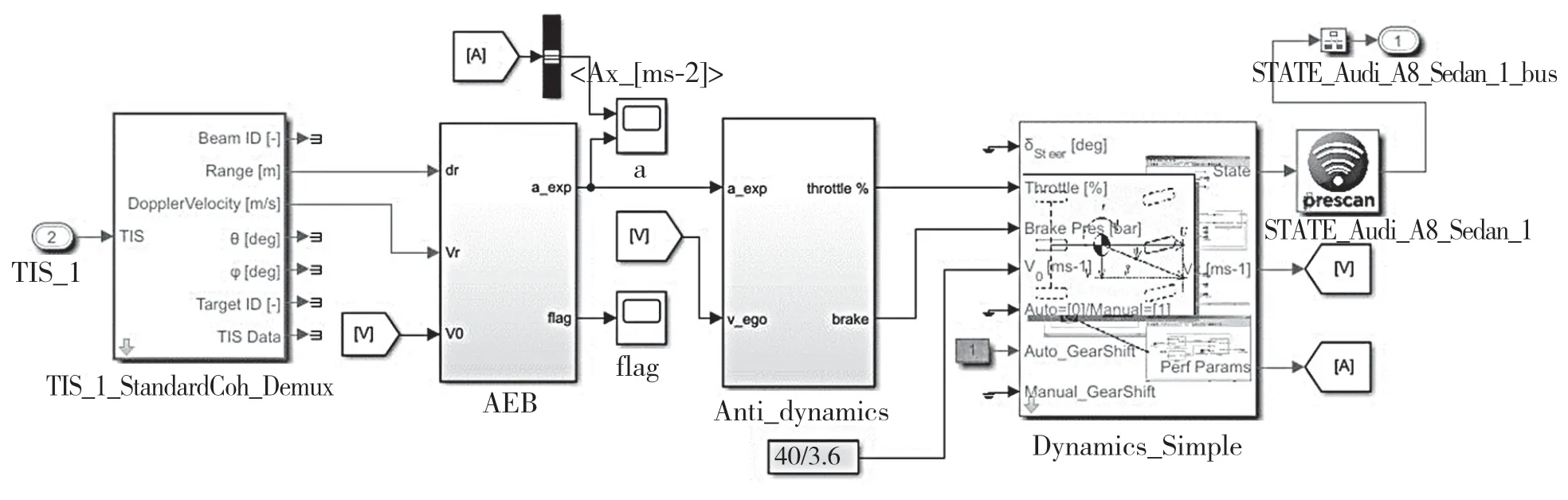
图6 联合仿真平台Fig.6 Co-simulation platform
4.2 AEB CCR 测试场景
C-NCAP(2021 年版)《主动安全ADAS 系统试验方法》规定了车辆追尾自动紧急制动系统(AEB CCR)实验场景。测试工况分为2 类,即目标车辆静止,后车与前车追尾的场景(Car to Car Stationary,CCRs)和目标车辆匀速慢行,后车与前车追尾的场景(Car to Car Moving,CCRm)。测试场景如图7 所示。
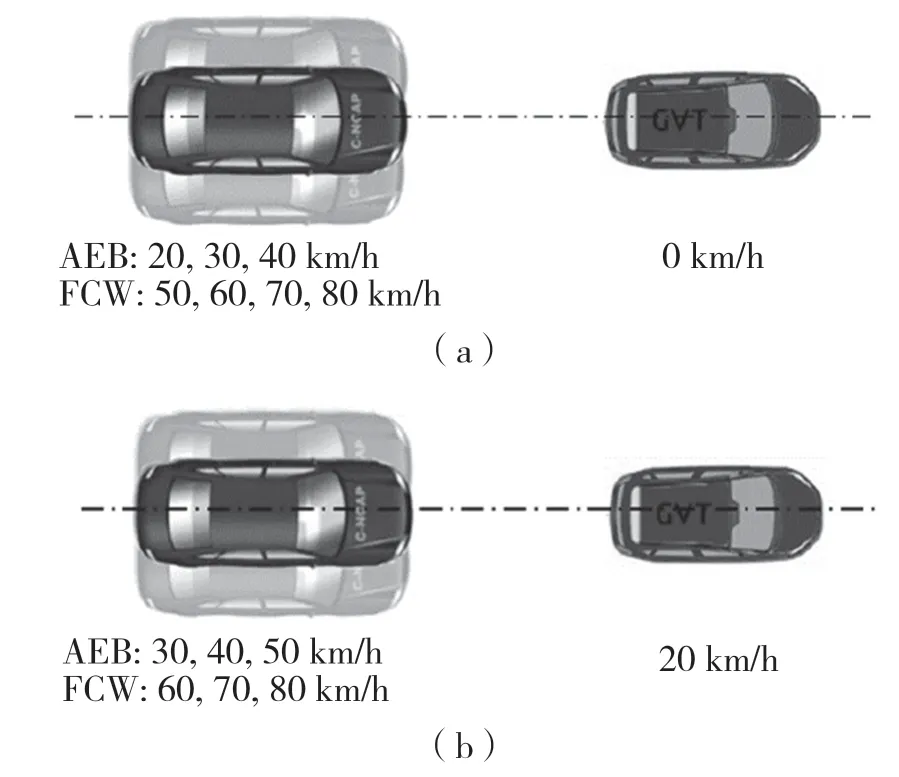
图7 测试场景Fig.7 Test scenario
4.3 AEB CCR 仿真验证及结果分析
由于篇幅有限,本文选取自车速度40 km/h的CCRs 测试工况和自车速度50 km/h 的CCRm测试工况,进行仿真结果分析,联合仿真结果如图8 和图9 所示。
如图8 和图9 所示两种典型工况仿真结果中,车辆自主制动后与目标车相对距离曲线显示成功避撞,制动停止相对距离分别为1.97 m 和2.26 m,均在合理避撞车距范围内。相对车速曲线变化平稳,不同制动强度下速度变化响应及时。前碰撞预警(FCW)系统功能正常,准确地发出一级预警信号1 和二级预警信号2。两种测试工况下的实际减速度和期望减速度跟随性较好,正常行驶和制动过程中自车减速度满足AEB 系统减速度请求,误差较小。
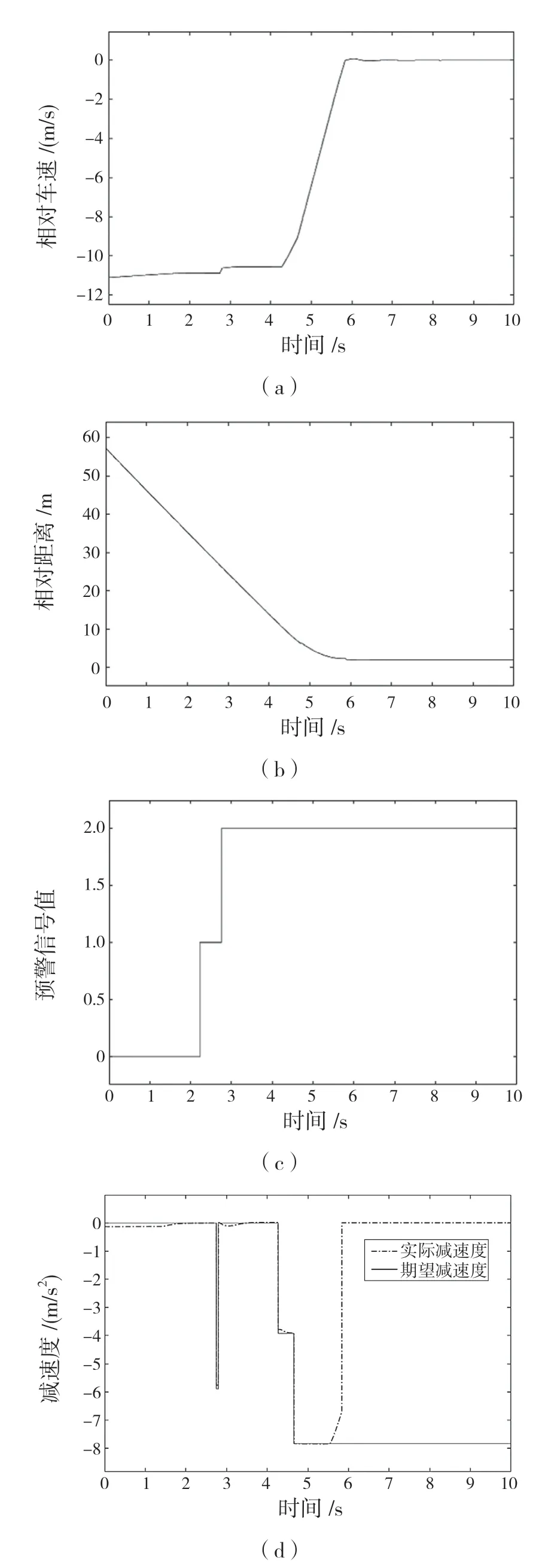
图8 CCRs 测试工况Fig.8 CCRs test
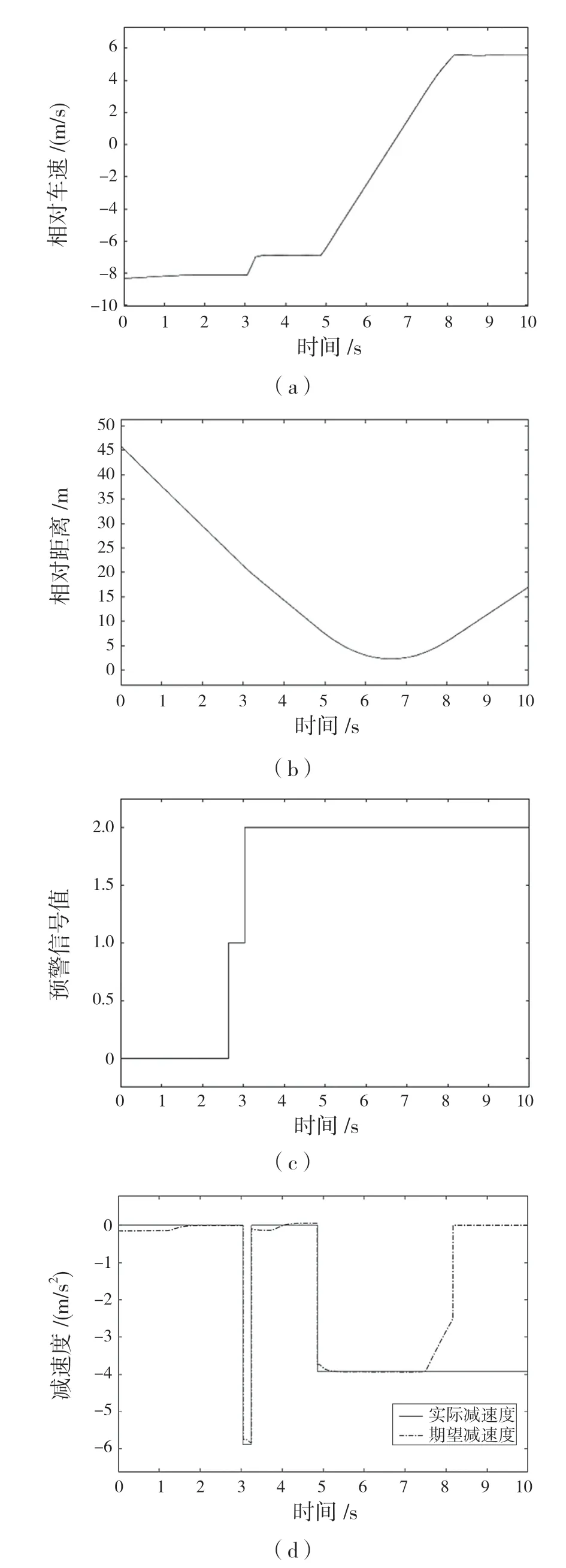
图9 CCRm 测试工况Fig.9 CCRm test
从两种测试工况的减速度跟随响应曲线,图8(d)和图9(d)中看出,点刹预警功能均正常激活,自车进行强度为0.6 g 的短暂制动,在AEB 自主制动之前能更有效地提醒驾驶员当前危险路况。图8(d)中,目标车静止,驾驶员未介入,自车在分级制动控制策略下先进行强度为0.4g 的一级制动,后进行强度为0.8 g 的二级制动。图9(d)中,目标车以20 km/h 的速度行驶,驾驶员未介入,两车相对距离未达到制动临界距离d1,自车一直进行制动强度为0.4 g 的一级制动,直至停下。
完整的AEB CCR 测试工况仿真结果如表2所示,仅统计制动停止相对距离。结合表2 统计数据,分析个测试工况仿真结果可得:车辆紧急制动完成后,与目标车纵向相对距离保持在1.93~3.29 m,各个工况均成功避撞,未出现过大或过小的制动停止相对距离;由于目标车匀速慢行,CCRm 测试工况的制动停止距离仿真结果普遍比CCRs 的大;CCRm 测试工况下,当自车车速大于60 km/h 时,制动停止相对距离相较于低速工况较明显增大,这是由于高速工况下,自车在AEB 系统控制下进入高强度的二级制动。
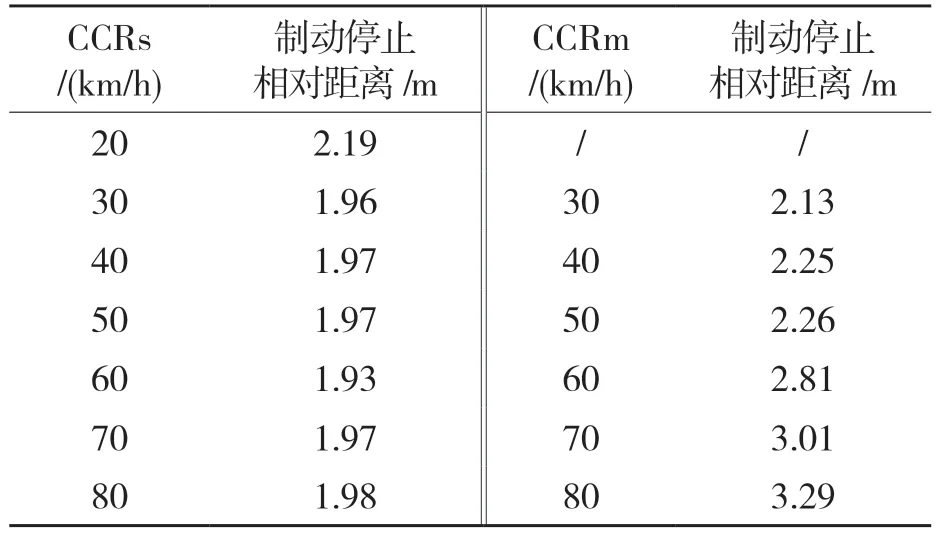
表2 测试工况仿真结果Tab.2 Simulation results of test conditions
5 结论
本文基于碰撞时间模型、安全距离模型的分级预警和制动控制策略能够正确发出前方目标车碰撞预警、点刹预警和分级制动信号,在驾驶员未介入的情况下成功避撞,自车和目标车之间制动停止相对距离在合理避撞距离范围内。
自车实际减速度与AEB 系统期望减速度跟随性较好,响应及时。CCRm 测试场景中,自车在高速工况下制动停止时距目标车相对较远,且可预测车速越高,制动停止相对距离越大。在后续算法开发中,可通过标定系统参数ε,或者采用动态参数ε,优化自动紧急制动控制算法,达到更加理想的避撞效果。
