夹取振动复合式取苗机构的结构设计
2022-10-31姚思博刘剑雄曾家兴石乔赵仓圆何湘
姚思博,刘剑雄,曾家兴,石乔,赵仓圆,何湘
(1.650550 云南省 昆明市 昆明理工大学 机电工程学院;2.650224 云南省 昆明市 云南省农业机械鉴定站)
0 引言
目前,我国移栽机多以半自动为主,取苗、投苗仍需人工操作,劳动强度高并且工作效率低,为了降低劳动强度、减少人力、降低成本、提高移栽效率和质量、实现全自动化移栽,发展取苗机构和投苗机构很有必要[1]。
国外旱田移栽机械的研究已有很长的发展历史,早已开始研究高效率、全自动的移栽机械[2]。现在市场上已经出现很多种成熟的机型并开始应用,如意大利Ferrari 公司生产的Futura 系列,英国Pearson、日本久保田以及日本洋马等公司的全自动移栽机。这些公司的全自动移栽机大多是在原半自动移栽机的基础上添加了自动取苗、自动投苗装置加以完善,但这些移栽机的研发大都是结合了本国农作物的农艺和种植习惯,并不能完全符合我国的农业生产。
国内旱田移栽机械的研究起步较晚,最初在20 世纪60 年代进行对棉花和红薯的移栽试验,但到了20 世纪70 年代,轻工部研究所才研制出甜菜钵苗移栽机,由于成本问题并未推广。直到20 世纪80 年代初,国内部分单位研发出各种蔬菜半自动移栽机,虽已改善大部分性能,但用户认可度较低,并未在市场上推广使用。从21 世纪开始,我国的蔬菜移栽机的研发才算是有一定的规模[3]。例如:华龙2ZBZ-2A 型半自动乘坐式移栽机、鼎铎2ZB-2 半自动移栽机、富来威2ZQ半自动移栽机、新疆农科院等研制的2ZT-2 型纸筒甜菜移栽机等。但是国内取苗机构的研究才刚刚发展,由于取苗精度、自动化程度、取苗成功率等方面的问题,国内现有的取苗机构并不能投入到实际应用中。会出现实际取苗成功率低于试验取苗成功率,并且实际伤苗率高于试验伤苗率等问题。
本文设计了一种夹取振动结合的取苗机构,通过预振动来减少含根基质与穴盘间的粘附力,再通过夹紧装置将苗从穴盘中取出,通过理论分析完成机构的设计与优化。
1 整机结构与工作原理
1.1 整机结构
夹取振动式取苗机构主要由夹取苗机构、振动装置等部分组成,取苗机构整机结构如图1 所示。与机器配套使用的苗盘由穴苗盘、无纺布育苗袋、钵苗组成,穴苗盘为标准的72 孔穴苗盘。振动电机安装在机架中央,振动架4 个边角下方分别由2 个弹簧固定在机架上并由滑轨来限定机架与振动板的位置,振动过程中使钵苗产生一定的惯性力,并克服钵苗与苗盘之间的摩擦力,以便钵苗能轻松从育苗盘中取出。夹苗机构通过手柄控制钢丝软绳夹住钵苗茎杆,将钵苗从育苗盘中取出放入投苗匣中以便后续的投苗过程。振动装置与夹取装置相结合,共同完成取苗工作。其中夹取保护海绵的作用是防止夹取板力量过大将钵苗茎杆夹断,微调螺栓能调节钢丝软绳的松紧,取苗弹簧使机构处于常闭状态。
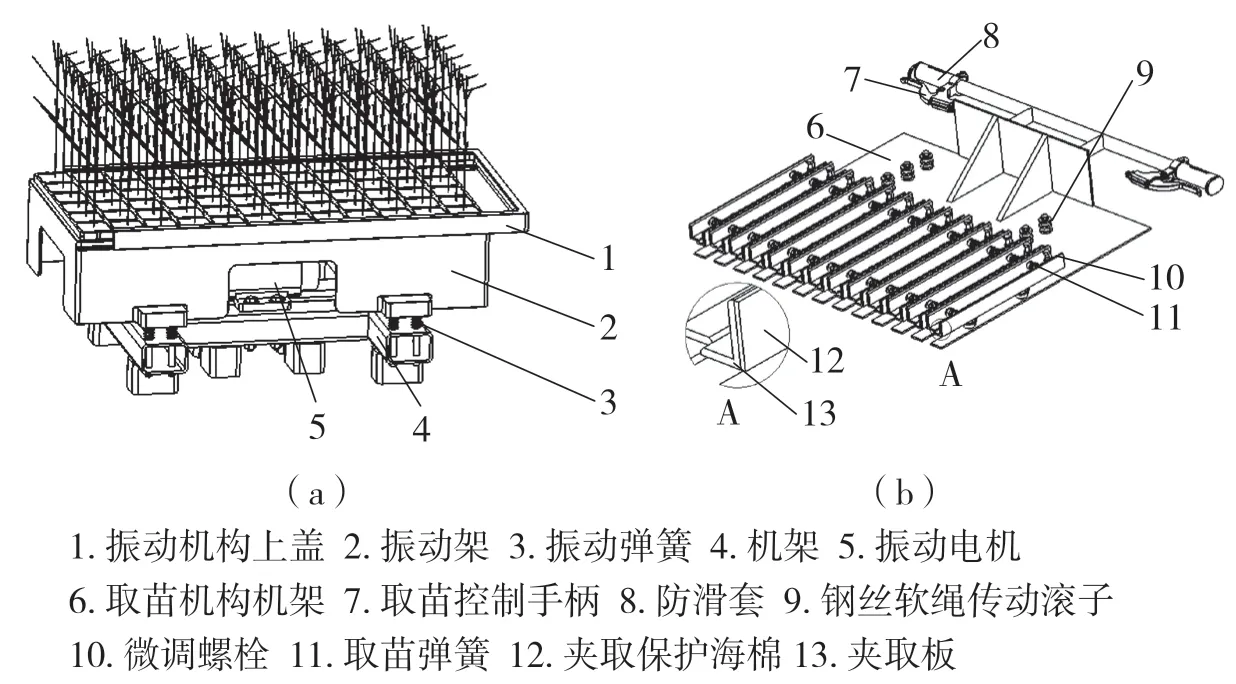
图1 整机结构示意图Fig.1 Structure diagram of seedlings unloading mechanism
1.2 工作原理
图2 为夹取振动复合式取苗机构的取苗原理图。将苗盘放到振动架上,振动机构上盖通过滑轨把苗盘固定在振动板上。振动板在振动电机的作用下,依靠8 个支撑振动弹簧,不断做简谐振动,带动苗盘上下振动,钵苗在振动过程中产生惯性力,来减少钵苗与苗穴内壁间的摩擦力,以便于钵苗的取出。当振动一段时间后,利用夹取机构将钵苗取出。当振动机构重力与振动产生的惯性力之和大于钵苗与苗穴内壁间的摩擦力时,即可取出钵苗,具体过程为:在初始阶段,由于取苗弹簧为常闭弹簧,此时两个夹取板处于闭合状态,通过手柄拉紧钢丝软绳带动两个夹取板打开,将钵苗茎秆放置于两个夹取板中间,松开手柄,此时夹取板夹住钵苗,垂直向上直接将钵苗取出,再将钵苗放入苗匣中,准备进行投苗阶段。
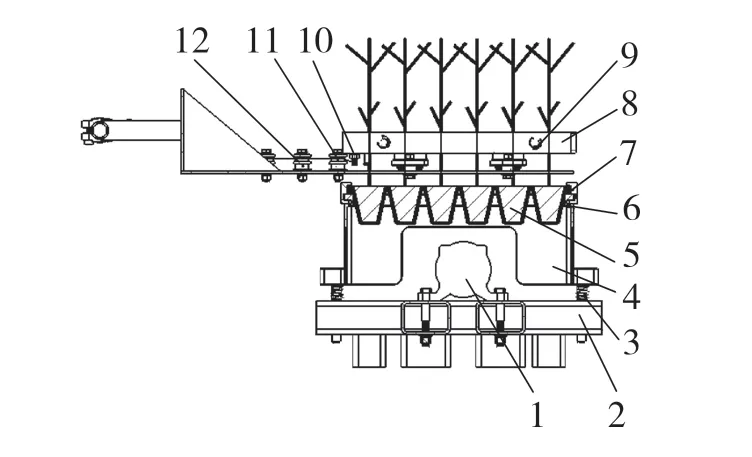
图2 取苗原理图Fig.2 Principle of seedlings unloading
2 振动过程中苗盘与钵苗力学模型
2.1 钵苗振出最小条件
建立坐标轴,其中坐标原点O位于振动架左下角,水平方向为x轴,竖直方向为y轴,并对苗盘单振动周期建立动力学分析模型,如图3 所示。苗盘整体在振动板的作用下不断做简谐运动。
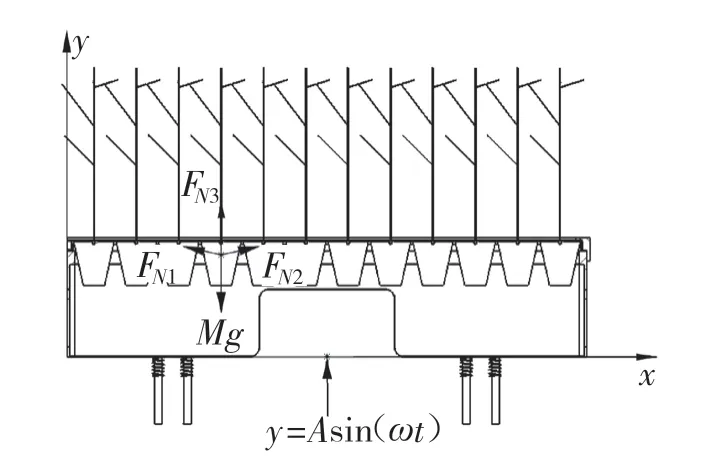
图3 苗盘动力学模型Fig.3 Dynamic model of seedling tray
振动机带动整个振动架做简谐运动,由于苗盘固定在振动架上,会使钵苗不停地上下振动,其位移方程为

对式(1)求导得其速度方程为
式中:A——振动电机振幅;ω——振动电机角速度。
为了使钵苗与苗盘分离,则钵苗与苗盘的粘附力FN此时为0,并要满足以下力学模型,即

设当时间t=B时钵苗与苗盘分离,则此时钵苗竖直方向的速度为
式中:F——振动所产生的惯性力;Fo——其他外力;FN1,FN2——钵苗对苗盘穴孔侧壁的粘附力;FN3——钵苗对苗盘穴孔底部的粘附力;θ——钵苗基质的倾斜角度。
可通过试验得出脱盘力FL。在不考虑其他因素的情况下,脱盘力能反映出粘附力的大小,即

钵苗在抛起后,短时间内做竖直方向速度为vy的上抛运动,考虑到有空气阻力的影响,设空气对物体的阻力与速度的平方成正比,即

式中:f——空气阻力;k1——空气阻力系数;v——钵苗速度。
综合式(3)、式(8),建立钵苗的运动微分方程:

式中:mi——单株钵苗质量;vy——钵苗竖直方向速度。对式(9)进行定积分

求得钵苗想要脱离苗盘时所需的速度为

将式(4)、式(7)代入式(11)可得

文献[4-5]研究得出,72 孔辣椒穴盘苗拉拔的脱盘力均值为(1.63±0.29)N,标准差为0.27,钵苗质量约为12 g。将数值代入式(12)中并通过分析可知,在振动过程中,振动电机的频率和振幅为影响苗盘取苗成功率的主要因素,钵苗与苗盘间的脱盘力也是取苗成功率的另一因素。Yang[6]等发现钵苗的粘附力与钵苗基质含水率有一定关系,并且通过穴盘苗脱盘试验得出脱盘力与钵苗基质含水率有一定关系;并且Ryu[7]等通过移栽试验,发现在含水率为44%~59%的钵苗有很好的移栽效果,其试验成功率为99%,故基质含水率是取苗成功率的另一因素。
2.2 钵苗振出不受破坏的最小条件
为防止振动取苗过程中由于振动导致钵苗破坏,必须经过计算和试验证明在取苗过程中所选用的频率不会导致钵苗的破坏。其中育苗基质主要由草炭和蛭石组成,可以近似看成为煤岩体。
在阻尼(欠阻尼)单自由度振动系统中,其固有频率为

式中:ω0——振动系统的固有角速度;k2——振动系统的刚度系数;M——振动系统的质量。
刘建锋[8]等通过试验得出阻尼比ζ为2.64%~5.34%,将阻尼比代入式(13)中发现,阻尼比对固有频率的影响较小,可以将式(13)近似认为单自由度无阻尼振动系统中的固有频率,即

钵苗和苗盘一起振动为多自由振动。根据机械振动理论,苗盘为72 孔,含有72 个自由度的无阻尼自由振动系统的运动微分方程为:
由于初始阶段所有钵苗位于苗盘中,故假设所有钵苗做同步简谐振动,故式(16)的特解为

式中:p——钵苗的固有频率;φ——相位;t——时间。

将式(19)代入式(16)求得

从式(21)可以看出,若要使A 有非零解,则必须满足其系数行列式为0,即

式(22)为关于p2的72 次多项式,从该式中可以求出苗盘中72 个钵苗的固有频率。
李成武[9]等通过试验得出,煤岩体自振频率约为50 Hz。故可以将振动电机的振动频率调节到在可以取苗的振动范围中并且不破坏钵苗基质的频率。
2.3 夹取苗机构的结构参数设计
为了保证夹取苗机构在非工作状态时处于常闭状态,需保证取苗弹簧为常开弹簧,并且其长度l与闭合时两个夹取板距离D相同,即

具体细节,如图4 所示。
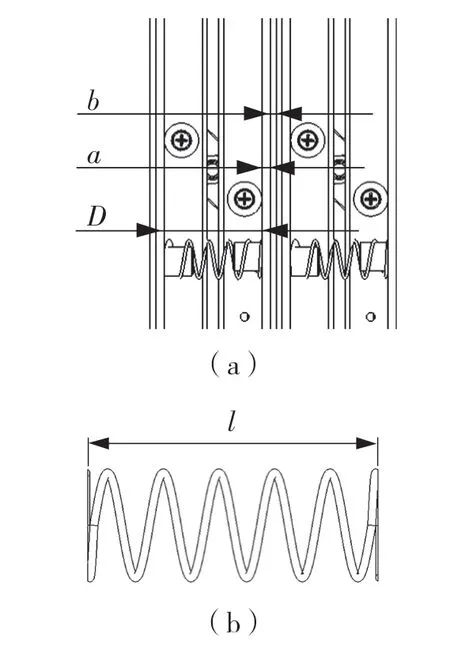
图4 结构尺寸示意图1Fig.4 Structure size diagram 1
图4 中:a——夹取板厚度;b——夹取保护海绵厚度。
为保证夹取板打开距离基本相同,由于钵苗间距固定,相邻夹取板距离相同,故要保证相邻两个钢丝软绳传动滚子的距离相同,如图5 所示。
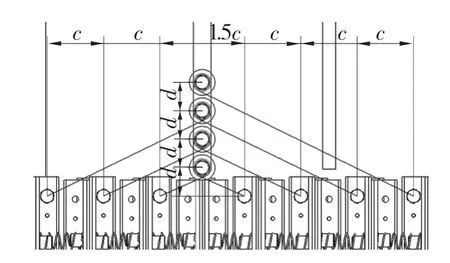
图5 结构尺寸示意图2Fig.5 Structure size diagram 2
图5 中:c——钵苗盘孔距;d——相邻两个钢丝软绳传动滚子的距离。
通过计算得出夹苗板打开时,两个保护海绵的间距数值差可以忽略不计,理论计算上可以达到取苗要求。
3 结论
设计的夹取振动复合式取苗机构主要由夹取机构和振动装置等部分组成,各部分配合完成取苗工作。通过动力学模型和振动模型分析得出振动电机的振动频率、振幅和钵苗基质含水率与取苗成功率有一定关系。本文为后续取投苗机构的设计与研发提供一种新思路。
