基于无人机的森林火灾监测系统设计
2022-10-31刘永昌尹百通邹庆勇徐远征
刘永昌,尹百通,邹庆勇,徐远征
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
我国疆域辽阔,森林资源总量大,森林防火工作复杂,形势严峻。我国森林火灾预防大多以人员巡山为主,这样的方式耗时费力,在密林地区还比较危险。未来我国无人机系统会对林业经济发展做出巨大贡献[1]。近年来国内外学者针对火灾的物理现象展开了多种技术研究,例如,火焰图像识别技术;红外感温识别;气体火灾探测等,主要探测器分为:气体型、感温型、感烟型、感光型[2]。续航里程低是限制无人机发展的一大因素;图像识别和红外识别设备使得监测无人机成本高;高耗电降低了无人机巡航范围,也加大了设备成本[3]。另外,森林火灾和城市建筑火灾有很大区别,甚至北方森林和南方森林植被覆盖不同,阴燃或明燃释放的气体成分也有很大差别[4-5],以上这些对烟雾传感器选型至关重要。鉴于上述原因,本文结合相关算法,着重研究烟雾传感器对火灾的监测效果,结合全球卫星定位系统、超宽带定位技术和通信技术,设计了一套基于自巡航无人机的森林火灾监测系统。
1 系统整体设计
该监测系统由两大板块组成:负责现场的无人机采集平台和远程监测平台。现场的无人机采集平台主要负责收集烟雾传感器采集的烟雾信号和处理信号、无人机位置的实时定位数据的采集和无人机各项数据的实时上传;远程监测平台对无人机传来的数据进行解析显示以及判断警情级别和警报处理。系统整体设计如图1 所示。
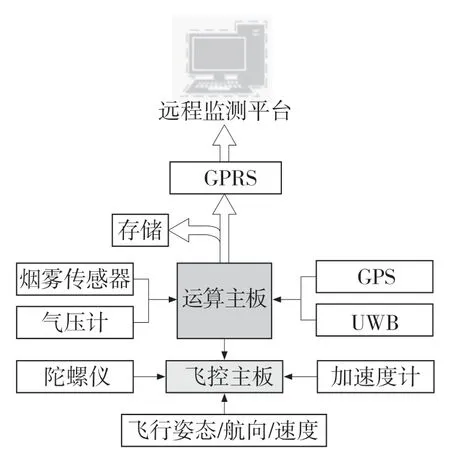
图1 系统整体设计框图Fig.1 Overall design block diagram of the system
负责现场的无人机采集平台由2 部分组成:控制飞行姿态的飞控主板和采集数据的运算主板。飞控主板的主要功能是采集陀螺仪实时数据和罗盘实时数据,集成相关算法从而控制无人机飞行姿态,保持无人机飞行平稳。本系统采用的飞控主板是市面上开源的飞控模块。由于飞控模块的开发涉及更多知识和方面,采用开源模块可以节省飞控部分的开发时间[6];控制主板的主要功能是采集多路烟雾传感器数据,对数据进行逻辑运算和数据融合,采集无人机实时定位数据以及对数据进行打包和通过GPRS 与上位机远程通信。
飞控主板和控制主板均采用嵌入式中低端32位ARM 微处理器STM32F103C8T6。无人机平台采用双主板的设计方案,在控制成本的前提下让2 个单片机各司其职,降低了单片机的运算压力且提高了系统的稳定性[7]。无人机实物图如图2 所示。

图2 搭载多路烟雾传感器的无人机实物图Fig.2 Real image of UAV equipped with multiple smoke sensors
2 硬件设计
无人机搭载的控制主板的电路设计,主要包括稳压电路、单片机最小系统、GPRS 通信模块电路和烟雾传感器逻辑电路。
2.1 烟雾传感器逻辑电路
本系统设计的无人机主要通过多路烟雾传感器检测现场是否有火灾发生,从而降低无人机平台成本。为了进一步提高系统检测的灵敏性,在控制主板上增加了硬件逻辑或运算电路,每2 个传感器一组,只要有任何一个传感器触发信号就会传送到单片机。传感器硬件逻辑电路如图3 所示。
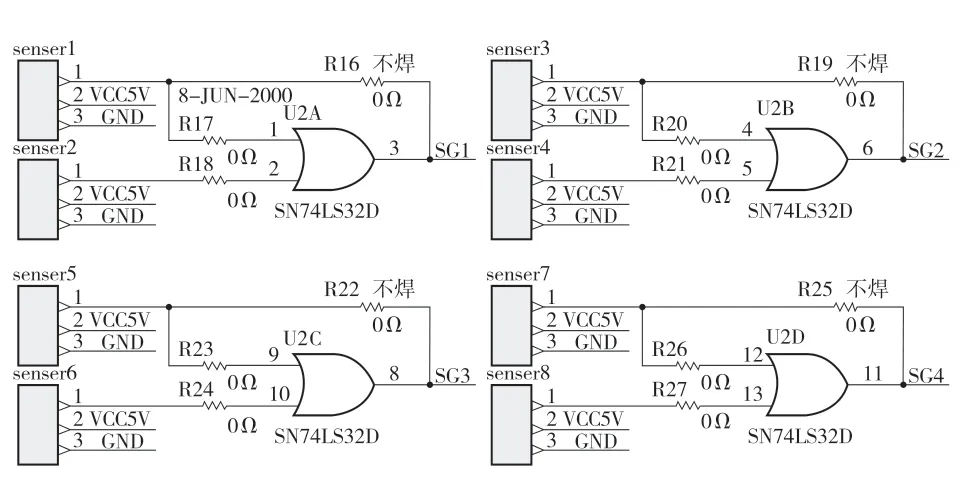
图3 传感器逻辑电路Fig.3 Sensor logic circuit
2.2 通信模块电路
该系统采用了安信可开发的A9G 模块。该模块是一个集成GPRS 和GPS 于一体的四频通信模组,目前广泛应用于各种物联网场合。该模组采用SMD 封装,开发简单并且适用于工作环境比较恶劣的场所。A9G 模组支持AT 指令操作,与单片机通过UART 通信。GPS 定位精度达到2.5 m。该模块还支持一键复位操作,当通讯失败可以通过复位操作恢复状态。通信模块的电路设计如图4 所示。
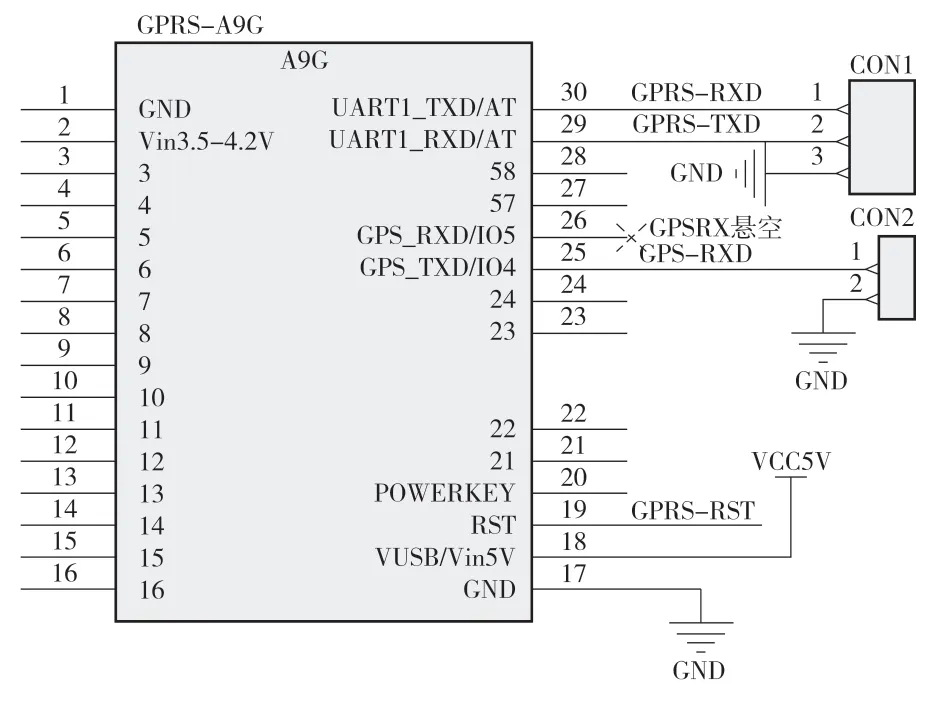
图4 通信模块电路Fig.4 Communication module circuit
2.3 电池监测电路
电池续航问题是无人机的重点,如果在电池电压过低的情况下没有返航,将会给无人机带来灾难性的后果。在硬件设计中,加上电池电压监测电路将为无人机的安全提供充分保障。如图5 是电池电压实时监测电路。STM32F103C8T6 内部具有12位ADC 采集单元,采集精度为0.8 mV。硬件电路使用BAT54S 将采集电压钳制在0~5 V,保障单片机的IO 安全。单片机定时1 s 检测电池电压,并将电压数据实时上传到远程监测平台,一旦电池电压达到阈值就会触发警报;若电池电压达到极限值将采取紧急措施强行降落,避免坠机引发灾难后果。
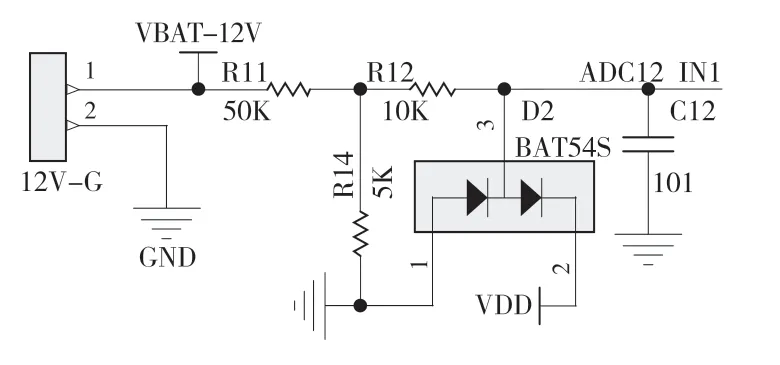
图5 电池电压监测电路Fig.5 Battery voltage monitoring circuit
3 程序设计
3.1 控制主板程序设计
服务于现场的无人机端是一个综合性平台,既要控制飞行器平稳飞行,又要负责现场数据采集以及远程通信等任务。飞行器姿态控制主要由飞控主板负责,根据收到的数据指令控制无人机飞行高度,为精确搜寻火灾信号提供服务;控制主板主要负责飞行线路规划、飞行器状态监测、现场传感器数据融合以及现场数据的远程传送。飞行器状态确认主要是飞行器起飞前的电池电量检测、GPRS远程连接状态的确认,只有经过控制主板检查符合安全起飞条件,方可允许飞行器起飞巡航。主控板定时器1定时500 ms执行一次中断服务函数,主要内容为:电池电量检测、定位数据获取、数据上传。如图6 是现场无人机端的控制程序拓扑图。
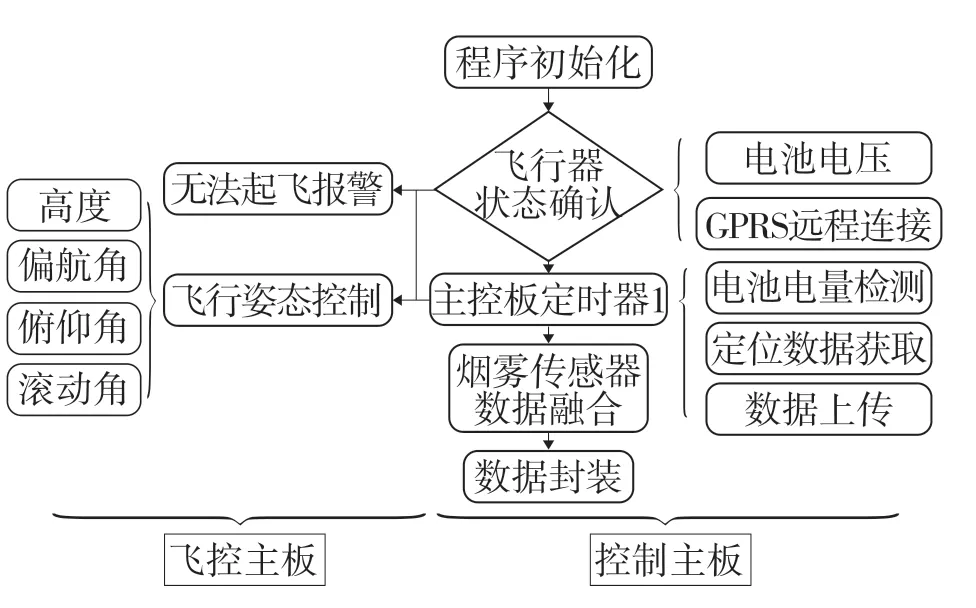
图6 控制程序整体设计拓扑图Fig.6 Control program overall design topology
3.1.1 火灾监测算法
现场无人机一共搭载了8 路烟雾传感器。为了提高传感器的检测可靠性和灵敏度,其中每2 路用硬件逻辑电路或运算,只要有任何一路传感器触发都会进入报警程序,然后控制主板会发送指令主动控制飞行器下降高度,进一步检测现场是否有警情发生。当再次融合烟雾传感器数据确认有警情发生时,控制主板将进行报警数据封装和上传。图7 是火灾监测算法流程图。
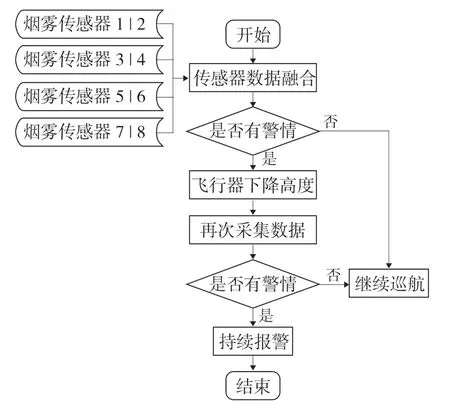
图7 火灾监测算法流程图Fig.7 Flow chart of fire monitoring algorithm
3.1.2 自巡航程序控制
无人机载有GPS 定位模块,可以实时获取自身位置数据,控制主板根据GPS 位置实时修正无人机巡航路径。由于市场上购买的GPS 定位模块具有一定的误差,采集的定位数据误差范围较大,现采用卡尔曼滤波法进行定位数据滤波处理。卡尔曼滤波器模型[8]如下:
(1)先验估计

(2)先验误差协方差矩阵

(3)卡尔曼增益

(4)后验估计

(5)更新误差协方差矩阵

主控板通过GPS 位置数据更新航线。通过PID控制算法将偏航误差融合成与无人机通信的SBUS协议中的通道数据,形成航向通道数据控制无人机姿态。无人机巡航过程中的高度控制也通过PID 实现。位置式PID 控制模型[9-10]如式(6):

式中:u(k)——PID 控制器输出信号;e(k)——控制器输入与设定值之间的误差;Kp——比例系数;Ki——积分系数,Kd——微分系数。
3.1.3 无人机数据协议
负责现场的无人机依靠单独的打包协议与远程监控端进行通讯。表1 展示了无人机与远程监控端通讯数据封装协议,这样的通讯协议具有稳定性高、数据丢失率小、数据传输简单且稳定的优点。
在表1 中,数据帧Ⅰ表示无人机发送给远程监控端的数据,数据帧Ⅱ表示远程监控端发送到无人机平台的数据。每一帧数据由帧头和数据段组成,其中电池电压占1 个字节,经度占10 个字节,纬度占8 个字节,警情等级占1 个字节。数据尾部的故障码用于紧急情况下的数据传输。在数据类型Ⅰ中,当无人机高度急剧下降时,故障码1 用于发送无人机故障信号。在数据类型Ⅱ中,控制命令用于发送控制命令,从而紧急时刻一键回收无人机,故障码2 用于控制无人机紧急降落并发送最后位置。

表1 远程协议数据封装协议Tab.1 Remote protocol data encapsulation protocol
3.2 远程监测平台程度设计
本文设计开发的无人机平台的最大特点就是由工作人员负责远程电脑的信息收集即可,不需要到现场巡视。上位机具有远程连接功能,工作人员可同时观测多台无人机的飞行状况和巡视数据,大大提高工作效率。现场的相关数据和报警信息由上位机提交。如图8 所示是监控端的功能拓扑图。
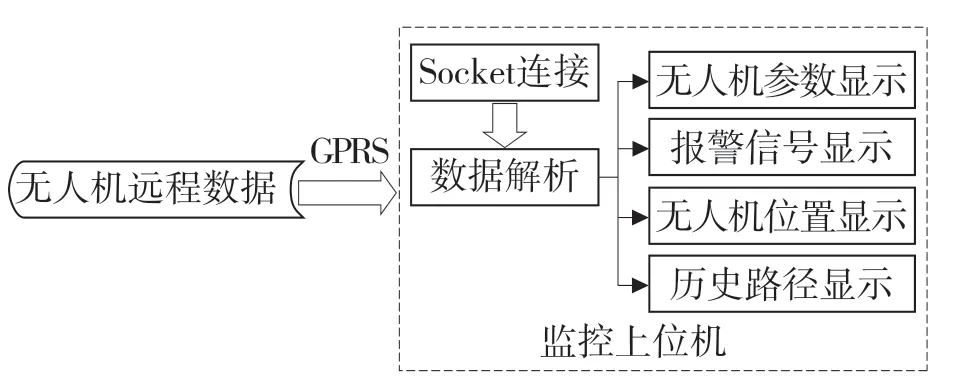
图8 监控端功能拓扑图Fig.8 Function topology of monitoring terminal
4 结语
基于无人机的森林火灾监测系统成本低,节省人力物力,可实现常态巡航监视森林安全。多路烟雾传感器降低了传感器的使用成本,同时提高了检测的灵敏度。基于现场无人机和远程监测平台可以实现长距离警情上传远程监控,及时反馈现场火灾情报。这方面的探索为无人机长航时巡航森林提供了参考。但是,只依靠一种传感器不足以百分百确认和识别现场的火灾情况,无法估计现场的着火范围以及火焰情况,在现场的无人机上添加摄像头远程传送图像和视频是至关重要的,将会提高火灾情报的可信度[11]。下一步应将工作重心放在多传感器的融合上,同时无人机受航程限制严重,也应该加大低功耗、轻量化方面的研究。
