基于小型相控阵天线二次雷达的自适应航迹滤波方法
2022-10-31程旗吴兵林洪彬
程旗,吴兵,林洪彬
(四川九洲空管科技有限责任公司,四川绵阳,621000)
0 引用
二次雷达系统是地面询问机和机载应答机组成的系统,由地面询问机发射询问电磁波,机载应答机接收到地面询问机发射的询问电磁波后,并产生相对应询问模式的应答电磁波,地面询问机再接收应答的电磁波进行探测定位以及解码。二次雷达系统采用一问一答的工作方式,通过较小的发射功率可以获取目标的距离、方位、身份代码(或属性)、高度以及其他扩展信息,可以为航管指挥或航空战略决策提供重要数据支撑。通常称地基部分为二次雷达或二次监视雷达[1]。一套地面二次雷达设备由二次天线、电源、发射机、接收机、信号处理、数据处理、显控终端构成。在二次雷达数据处理中,由点迹处理和航迹处理两部分组成。航迹处理的航迹滤波是采用滤波算法对目标探测位置进行最佳估计方法的处理,且用估计值来刷新目标位置,并预测目标下一周期最大概率出现的位置。通过滤波算法可降低探测噪声的影响,从而得到更加精准的目标位置。随着社会发展需求,二次雷达设备要求具备工作灵活化、体积小型化、功能齐全、性能优越、抗干扰强、可靠性高等特点,从而新增加了配套小型相控阵天线的二次雷达设备在高机动车载平台的应用场景。
1 现状简介
不同应用场景的二次雷达,其航迹处理部分采用不同的航迹滤波算法。若配套天线为机械天线或大型相控阵天线时,航迹处理中的航迹滤波常采用扩展卡尔曼滤波算法;若配套天线为小型相控阵天线时,航迹处理中的航迹滤波常采用曲线拟合最小二乘法算法。
小型相控阵天线的尺寸小,重量轻,安装灵活性好,满足车载平台的高机动性,却因尺寸小,可排列的辐射阵子数量就少,由移相特性决定了差通道形成效果并不理想,故有询问波束宽度过宽、接收信号幅度抖动明显、和差相位差计算误差较大等特征[2]。单脉冲二次雷达的测角是通过对接收到的应答电磁波信号经过高频和/差混合器实现两个波束的加/减,即等效为和波束和差波束,从而可以得到和通道的应答幅度和差通道的应答幅度,根据和通道幅度与差通道的幅度差值,查找对应二次天线的特性偏移量表,即可得到当前方位与主轴法向的偏移量(OBA)。再由和通道与差通道的相位差可表示出当前探测目标是在扫描基准轴的左边还是右边,也即称为符号位(0值表示在左侧,1值表示在右侧)。扫描基准轴信息(0θ)由方位码盘器或者波位调度器给出,综合以上信息即可算出本次应答脉冲对应的方位值(ω)。
若符号位为0,则ω=θ0+OBA
若符号位为1,则ω=θ0-OBA
当二次雷达的询问波束扫过目标时,目标会产生多次的应答信号,从而会得到一组目标的方位探测值1ω、2ω、3ω…nω。在点迹处理过程中,计算出最终目标的方位(finalω)为:
主波束宽度过宽会导致波束指向精度不高,也即是0θ的精度相对较差;接收信号幅度抖动明显会导致查找特性偏移量表得到的偏移量(OBA)数值不精确;和差相位差计算误差较大会导致局部符号位不准确。根据单脉冲二次雷达测角原理,可知配套小型相控阵天线的二次雷达的测角精准度并不理想,探测点迹效果常出现方位歪曲的现象,故在此条件下,航迹滤波使用曲线拟合最小二乘法算法,可最大限度地利用目标的历史运动轨迹数据,使滤波后的数据与实际数据之间误差的平方和是最小的。该算法实现过程简单而且运算简洁高效。
曲线拟合的最小二乘法就是针对公式(1)要找到函数S*(θ)使得残差平方和最小。

用多元线性回归来描述,假设函数Sφ(x111,x2,…xm)=φ0+φx+…φm xm的矩阵表达式为:

其中假设函数Sφ(X)=Xφ为n×1的向量,φ为m×1的向量,X为n×m维矩阵;m代表样本的特征数,n代表样本的个数。

上述公式整理计算得到φ=X TY(X TX)-1。
在二次雷达航迹处理过程中,根据飞行目标的运动特征,忽略高阶运动曲线带来的失真以及大运算量,可将目标运动轨迹近似的看作是由二次曲线和一次曲线的共同组合体,若目标偏移当前计算的共同组合体轨迹时,需根据历史趋势对探测值进行修正以及对共同组合体的运动模型进行改进处理。故在实际工程中,样本特征m的取值分别为1和2。根据上述原理,在曲线拟合最小二乘法滤波算法实现过程中需涉及4个参数,分别是拟合点数(N)、一阶占比率(P1)、拟合占比率(Pf)和修正系数(F)。
因二次雷达探测是在极坐标系下完成的,在航迹处理时,根据曲线拟合最小二乘法算法的特性,常采用直角坐标系进行计算,故需对点迹数据的位置信息进行直接坐标系的变换:设目标在极坐标系下的坐标值为(R,θ),在直角坐标系下的坐标值为(x,y),则转换公式如公式(4)和公式(5)。

对x轴历史样本值分别进行二次曲线拟合和一次曲线拟合。二次曲线拟合计算出其二次曲线函数的系数数组a2[2],一次曲线拟合计算出其一次曲线函数的系数数组a1[1]。再由设定的一阶占比率计算出本次预测值(V1)和均值差(V2)。二次曲线预测值(V3)=a2[2]·N2+a2[1]·N+a2[0];一 次 曲 线 预 测 值(V4) = a1[1]·N+a1[0];V1=V3·(1-P1)+V4·P1。,其中Prei是历史预测值,Vali是历史样本值。
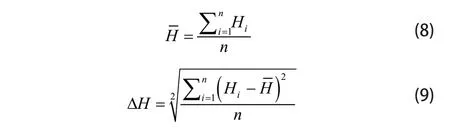
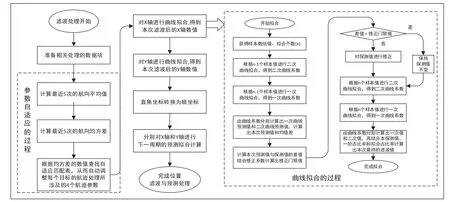
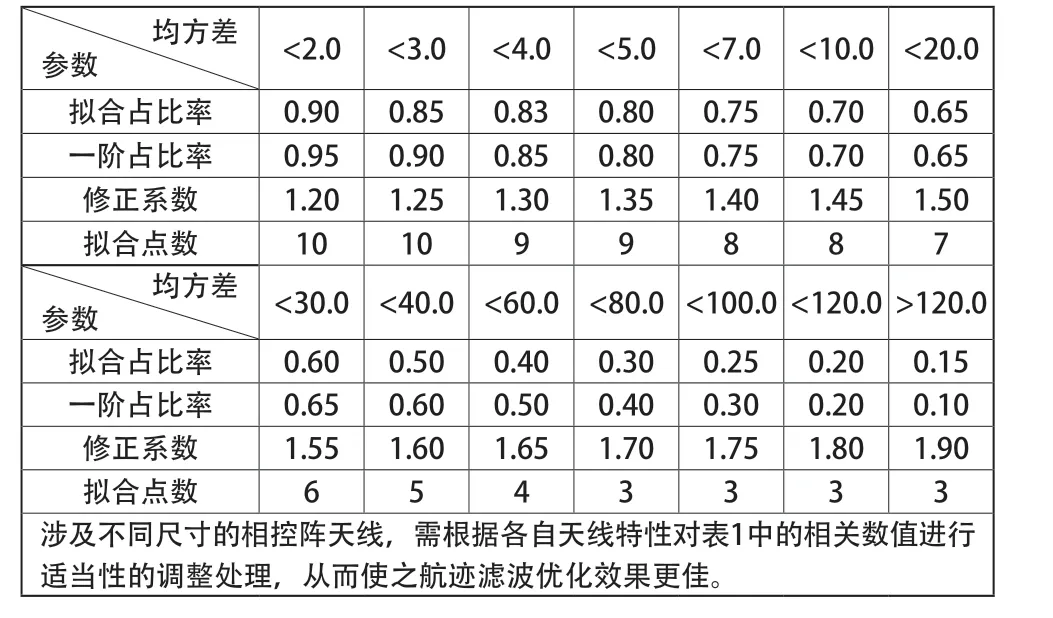
在计算出V1和本次探测值(DV1)的差值(DV2),当DV2 然后将FV带入拟合样本数中,分别进行二次曲线拟合和一次曲线拟合。二次曲线拟合计算出二次曲线函数的系数数组a2[2],一次曲线拟合计算出一次曲线函数的系数数组a1[1]。再由设定的一阶占比率计算出本次拟合后数值(SV)。二次曲线拟合值(S2)=a2[2]·N2+a2[1]·N+a2[0];一次曲线拟合值(S1)=a1[1]·N+a1[0];拟合后数值(SV)=S2·(1-P1)+S1·P1。最终滤波值= DV1·(1-Pf)+SV·Pf。y轴的滤波处理和x轴是相同的处理过程。 完成对x轴和y轴的曲线拟合最小二乘法滤波处理后,得到x'和y'。再将其转换至极坐标下的距离和方位,其转换公式如公式(6)和公式(7)。 即可得到滤波后的目标距离(′R)和方位(′θ)。 根据滤波算法的工作原理,若拟合点数的数值过大,则会出现运动状态滞后,不利用机动或转弯目标的滤波,若拟合点数的数值过小,则因拟合样本值太少,达不到拟合效果;若一阶占比率的数值太高,则对直线飞行目标滤波效果好,但转弯或机动目标滤波效果差,若一阶占比率的数值过低,则直线飞行目标的滤波效果差;若拟合占比率的数值太大,则会趋向拟合运动模型,偏离真实运动轨迹;若拟合占比率的数值太小,则航迹滤波效果不佳;若修正系数的数值偏高,则会趋向拟合运动模型,偏离真实运动轨迹;若修正系数的数值偏低,则滤波效果会不理想。故这4个航迹滤波参数直接影响航迹滤波的最终效果。 原工程应用中,二次航迹滤波处理中拟合点数固定设置为5次,一阶占比率固定设置为0.7,拟合占比率固定设置为0.6,修正系数固定设置为1.3。虽对运动轨迹模型失真的情况进行了修正处理,但是固定的航迹处理参数针对所有目标的运动轨迹进行滤波处理,导致目标的运动轨迹效果并不理想。 针对上述问题本文提出,通过计算每个目标的历史运动航向变化特性,得到目标运动航向的变化趋势,由航向变化趋势来判断目标的运动趋势,再由已知的运动趋势参数来自适应的调整4个航迹滤波参数,从而使航迹滤波效果达到更佳的状态。 首先是根据记录的历史航向样本值,由公式(8)计算出最近n(n通常取5)次的航向平均值,再由公式(9)计算出航向变化的均方差。 其中Hi表示历史航向样本值,表示航向平均值,ΔH表示航向变化的均方差。 然后根据航向均方差来查找自适应匹配表,从而达到自适应调整拟合点数、一阶占比率、拟合占比率、修正系数的数值,使之航迹滤波参数与飞行目标的真实运动轨迹尽可能地相符合。最后使用曲线拟合最小二乘法滤波算法进行航迹滤波处理。自适应航迹滤波处理的整个过程图如图1所示。 图1 二次雷达自适应航迹滤波处理流程图 本工程项目示例的相控阵天线主要指标:2500mm (长)×540mm(高)×400mm(宽),法向波束宽度≤10度,±45°波束宽度范围≤15度,调度波位宽度为2度。其对应的自适应系数匹配关系详见表1。 表1 自适应系数匹配表 在工程实践中,通过C语言实现上述方法,大幅度提升了基于小型相控阵天线二次雷达的航迹滤波效果,目前已在实际工程项目中成功应用。工程中采集了2个特征明显目标的数据,第一个直线飞行目标的航迹滤波处理效果对比图如图2, 观察图2可知,点迹探测效果轨迹扭曲得非常明显。在原曲线拟合最小二乘法算法滤波下,目标轨迹虽有一定的平滑度,但仍然有明显的扭曲度。在使用自适应曲线拟合最小二乘法算法后,目标的运动轨迹明显得更加趋于直线。 图2 直线目标的航迹滤波处理效果图 第二个转弯飞行目标的航迹滤波处理效果对比图如图3所示。观察图3可知,点迹探测的位置稀疏不一。在原曲线拟合最小二乘法算法滤波下,目标轨迹稍有平滑,但转弯时有位置外突的现象,偏离目标的真实轨迹。在应用自适应曲线拟合最小二乘法算法后,目标的轨迹位置稀疏度更加均匀,转弯时位置更新与点迹之间的时延性低,更加符合目标飞机的真实轨迹。 针对目标直线飞行或转弯飞机的情况,采用本文提出的自适应航迹滤波算法后,输出的飞行目标轨迹效果明显更加平滑、位置更新的延时性低、更加贴近目标飞行的真实轨迹,从而提高二次雷达设备的在配套小尺寸相控阵天线时对应的探测位置精度指标要求。 本文通过计算最近n(n通常取5)次目标飞行航向变化的均方差值,使航迹滤波参数可根据均方差的数值进行自适应的调整,确认每个目标的航迹滤波处理过程中都有一个合宜的航迹轨迹模型所对应的航迹滤波参数,进而有效地优化了航迹滤波处理的效果,提高了二次雷达设备的探测位置精度。 通过数据分析与比较,本文中的自适应航迹滤波方法能在一定程度上提升基于小型相控阵天线二次雷达设备的探测位置精度,改善二次雷达设备性能。此方法是以探测点迹的位置为基准,故还需设备前端尽可能地提高性能,从而提高数据的准确性。
2 基于小型相控阵二次雷达自适应航迹滤波的方法
3 工程实现

4 结束语
