基于图像识别技术的测压管群水深智能获取方法
2022-10-29樊顾飞王芳芳
樊顾飞,高 昂,王芳芳,罗 洁
(南京水利科学研究院,江苏 南京 210029)
水利水电工程的过水建筑物,壁面会承受不同程度的水压力,如果某处水压力超过设计要求,易造成建筑物运行异常,甚至产生安全风险,如二滩水电站水垫塘底板因承受较大的水压力而发生破坏,对工程安全产生威胁,也造成了一定的经济损失[1]。因此,在工程设计阶段,常采用水工模型试验的方法研究各过水建筑物边壁所承受的水压力。因此,水压力是水利水电工程模型试验研究中需要关注的重要指标[2]。
水流对过流建筑物壁面的水压力受水流条件、边壁形状等因素影响,因此在物理模型试验研究中,如何准确全面地获取过流建筑物各测点的水压力一直备受关注。在物模试验中,水压力的获取方式主要有两种。一种是基于压力变送器组合而成的自动化采集方法,通过渗压计将水压力转变为电信号。该方法存在以下弊端:(1)对于较大尺度的水工模型试验,试验用水会挟带颗粒杂质(如泥沙、焊渣、铁锈等),容易淤堵压力变送器的采集孔;(2)对于采集数据异常的测点,不能即时在试验中发现并完善,可能会遗漏关键测点数据;(3)对于大批量测点的采集,压力变送器使用维护成本较高。另一种是根据连通器原理将测压管与测点相连,测压管内部水深能较好地反映该测点的水压力值。因此,测压管水深是试验中需要获取的重要参数。目前常采用人工读取测压管水深的方法,该方法存在以下弊端:(1)对于大批量测压管,需要耗费大量的时间与人力、物力,效率较低;(2)对测压管内水深变幅不大的情形适用性好,当测压管内水深变幅较大、变速较快时,该方法适用性极大受限;(3)难以实时、同步获取各测压管内水深随时间的变化序列;(4)存在人工读数误差,数据准确度不高。人工读取方法的弊端阻碍了对过流建筑物水压力参数的深入挖掘与分析。
基于此,本文将图像识别技术应用于水力学模型试验研究,提出了基于图像识别技术的测压管群水深智能获取方法,并建立智能识别系统,实现自动、同步获取多个测压管水深随时间的变化过程,可显著提高模型试验的效率与数据的丰富度。
1 研究方法与思路
近年来,随着图像采集技术和计算机技术的不断发展,自动化、信息化和智能化的图像识别技术已被广泛应用于水利实践中。Gao等[3]将无人机技术和图像识别技术应用于天然河道水位测量,显著提高了野外水位短期测量的效率;聂鼎等[4]提出了基于图像处理技术的水库水位获取方法,可避免外界因素对水位计算的干扰,与人工检测精度近似,但不适用于夜晚及坝坡不平整的小型水库;李翊等[5]提出了基于图像处理技术和人工神经网络的水位测量方法,克服了水尺倾斜及水面干扰带来的不利影响,该方法可有效识别水位,但也存在一定的误识别;鲍江等[6]运用Haar对视频图像进行分段处理,计算出水位线位置,但受光强影响明显;徐兴等[7]设计了基于图像处理技术的水位识别系统,利用裁剪、Cr色度分量提取、二值化等图像处理方法识别水中球形浮标的位置,检测水位高度,测量精度约0.22 cm;王伟等[8]利用ARM与图像处理技术对水位线与河岸线进行提取并计算水位线高度,实现二值化与直线提取自动化,满足了水位测站无人值守、自动测量的要求;Takagi等[9]运用多种算法检测标尺上的折点来检测水位线,但算法受标尺上污点影响较大。上述研究对基于图像识别技术的水位测量方法应用进行了有益探索,论证了图像识别技术在水位识别中的可行性,但目前还未见对多个测压管水位同步测量的方法和系统。
基于此,本文将图像识别技术应用于水工模型试验中测压管群水位的同步测量,提出了基于图像识别技术的测压管群水深智能获取方法,具体研究思路为:(1)测压管内放置可随水面运动的浮球;(2)摄像机侧视拍摄多个测压管内浮球随水面的升降过程;(3)将拍摄的影像资料导入计算机,由软件识别系统自动同步获取多个测压管内水深变化过程。系统软件以 Win10 为操作平台,以VC++2017结合OpenCV[10]为开发工具,通过图像识别技术获取多个浮球运动过程,得到测压管群水深实时变化过程。
2 图像识别检测技术流程
2.1 图像采集
清晰的水位变化图像是后续图像处理和水深统计的基础,因此图像的采集必须能获得清晰可靠的水深变化影像。为使多个测压管中浮球运动过程采集更加精准,需确保各测压管平行布置于测压排之上,各测压管垂直布置并位于同一立面;为有效识别浮球图像,浮球与测压排的颜色对比度需要大于预定值,多次对比分析后,将测压排设置为白色,浮球采用与测压排对比度高的红色。
2.2 图像预处理
为提高计算机对图像数据的计算效率,将彩色图像转化为灰度图像,灰度图像仍然可以反映图像的色度和亮度等级的分布及特征。将每帧图像转化为灰度图,可采用分量法进行图像灰度处理。
采用分量法获取灰度图的转换公式如下:

式中:fg(x,y)表 示原始RGB通道上色彩图转换后的灰度图;fR(x,y)、fG(x,y)、fB(x,y)分别表示红、绿、蓝3个通道的分量图。
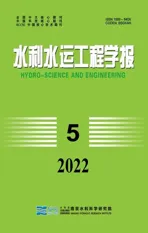
专用程序采用分量法将RGB三色的数值矩阵转化为灰度图的数值矩阵,通过对比观察,选取差异最明显的绿色通道灰度图的数值矩阵。某一帧原始RGB图见图1(a),灰度化处理后如图1(b)所示。
为了将反映测压管水深数据的红色浮球与背景分割开来,对灰度图的数值矩阵进行二值化操作。由于受光照不均等因素的影响,图片不同区域亮度不同,且不同时刻拍摄的图像整体灰度值也会有差异。因此很难通过某一个或某几个固定的阈值来实现图像分割。本系统采用自适应阈值方法,通过计算像素点周围一定区域的加权平均值,然后减去一个常数来得到自适应阈值。通过调试可得到分割后的二值化图,见图1(c),图中清晰可见8个浮球的黑色区域(灰度值为0),背景为白色(灰度值为255)。此外,图1(c)中左侧边缘处还可以看到两处干扰(红色箭头处,实际为安装螺丝),可能会被误判为浮球,需进一步处理。特别地,为确保二值化过程的顺利,需要注意提高目标点与背景色的对比强度,如本试验目标点采用红色小球,背景采用白色。
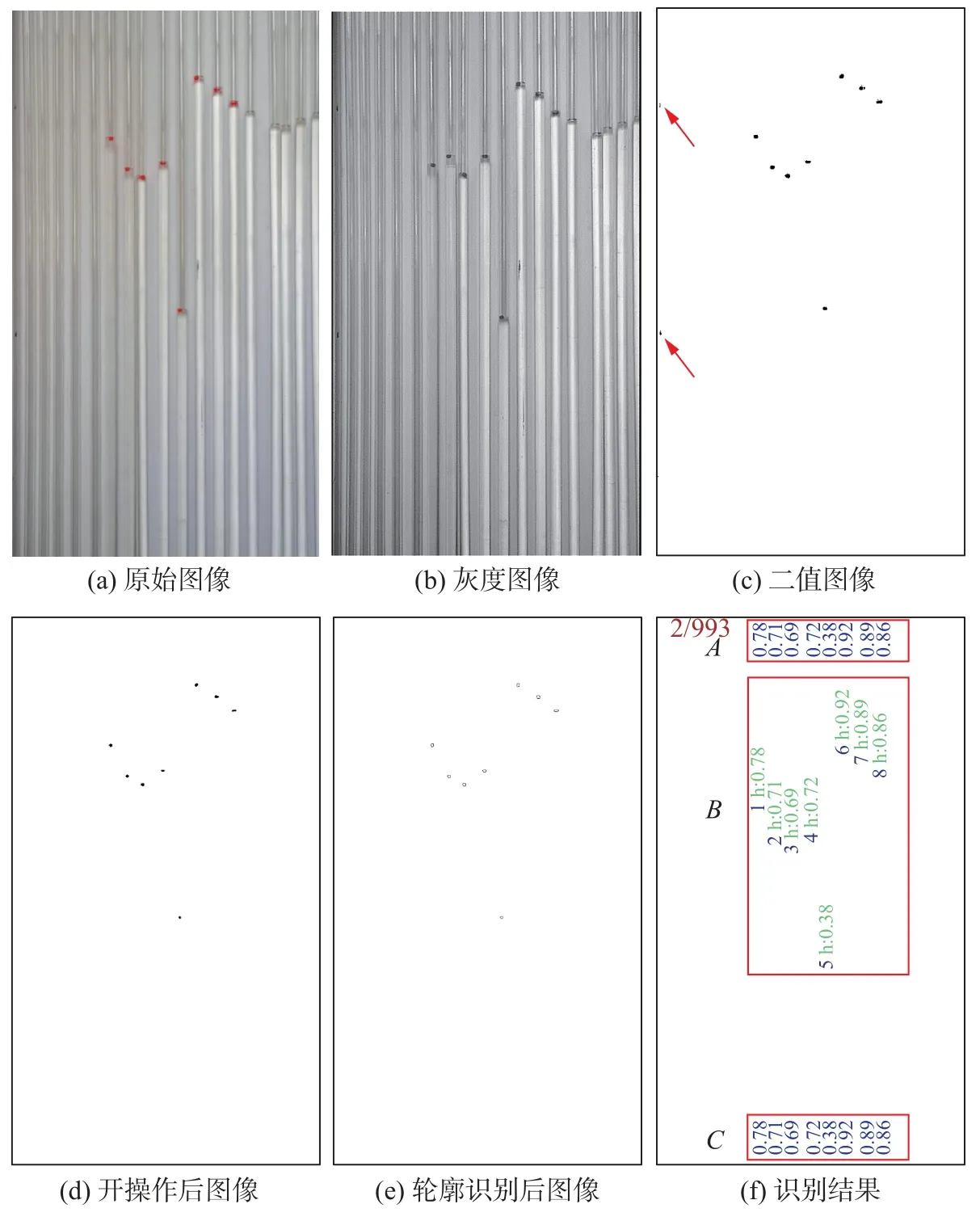
图1 图像识别过程Fig. 1 Image recognition process
为消除图像左侧边缘处的两处干扰,对浮球轮廓的裂隙进行融合,从而更准确地获得浮球轮廓。对二值化图的数值矩阵进行开操作,开操作[11]主要通过二值形态学中的腐蚀和膨胀操作相结合完成。腐蚀操作通过把定义的结构元原点依次在图像上按像素移动实现,任一位置的腐蚀结果基本与结构元中心重合。通过腐蚀操作可以进行降噪处理,表达式如下:

式中:f为待处理的图像;b为结构元;x、y为任意坐标位置像素。
膨胀操作则与腐蚀操作相反,通过把定义的结构元原点依次在图像上按像素移动,使目标图像相应扩张,膨胀操作可以填补目标区域中某些空洞及消除包含在目标区域中的小颗粒噪声,表达式如下:

开操作的表达式如下:

式中:f°b代表使用结构元b对图像f进行开操作处理。
通过多参数比选测试,选择了合适的结构元大小和开操作的次数,得到消除干扰后的二值化图和开操作图,见图1(c)、(d)。
2.3 计算球心坐标、统计水深
根据二值化图,采用findContours函数识别各浮球轮廓(见图1(e)),进一步获取各浮球轮廓的质心坐标,计算浮球质心竖向坐标与测压排基准竖向坐标的差,得到水深的像素值hp,将水深像素值乘以标定系数r,得到实际水深值ht。程序实时水深与统计的历史最大、最小水深见图1(f),图中“2”为当前帧数、“993”为总帧数、A为各测压管最大水深、B为各测压管实时水深、C为各测压管最小水深。各测压管水深H随时间T变化过程见图2。
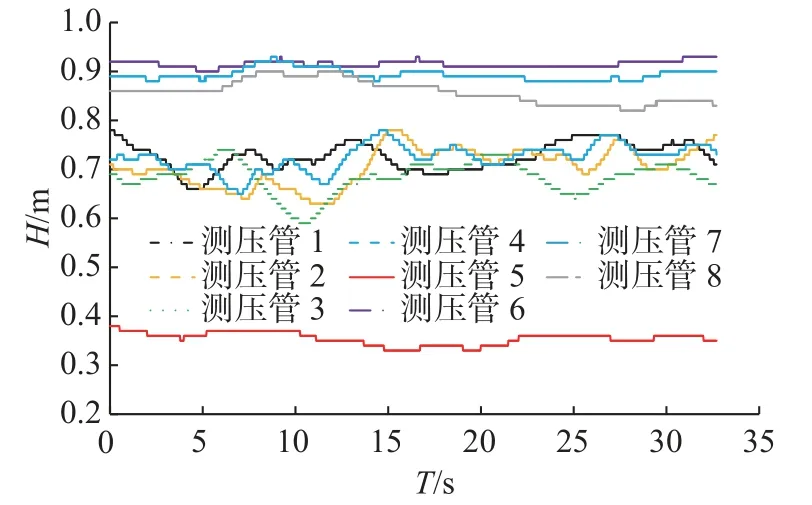
图2 各测压管水深随时间变化Fig. 2 Water depth variation of pressure measuring tubes along time
3 试验验证
3.1 试验条件
为验证该方法的有效性,将其应用于某水利枢纽水工模型试验研究。该水利枢纽工程为拱坝,泄洪消能形式为3表孔4深孔的挑流消能,工程对水垫塘的底板压力有较高要求,对模型试验过程中水垫塘底板多个测压管水深进行了智能获取。模型的水垫塘底部布置多个测压点,测压点通过输水管与测压管相连,测压管垂直布置于测压排,浮球漂浮于各测压管内水面处。测压管的材质为透明玻璃圆管,高度为2 m,内径为1.2 cm;测压排为纯白色背景,面积为2 m(高)×3 m(宽);浮球为红色高密度泡沫,直径为0.6 cm;摄像机采用索尼FDR-AX45彩色摄像机。
3.2 实现过程
步骤1:摄像机标定,获取标定系数r(采集区实际长度除以像素长度),此处为0.001 85(实际高度为2 m,对应像素长度为1 080);得到测压排基准线竖向像素坐标为122。
步骤2:摄像机拍摄浮球运动视频;视频像素为1 080×960(宽×高),帧率为30 Hz,拍摄时间为33.1 s,共获得993帧图像。
步骤3:拍摄结束后,将摄像机拍摄的视频载入计算机。
步骤4:图像识别模块采用图像识别算法,依次对视频内每帧图片中多个浮球的轮廓进行识别,获取浮球中心点像素竖向坐标,减去测压排像素纵坐标得到水深的像素值,并根据标定系数r计算实际水深。
步骤5:计算机保存识别和计算结果。
3.3 结果验证
为了验证该方法的有效性,同步采用人工测量的方法观察各测压管水深变化。人工测量方法通过在2 min的试验时间中不断追踪测压管群的水位特征高度,获取各测压管的最大水深和最小水深。图像识别方法和人工测量方法得到的水深特征值见表1。分析发现:(1)图像识别的结果与人工测量结果相近,误差在±1.5%以内;(2)人工测量结果的平均值是直接由最大值与最小值取平均得出,而图像识别结果的平均值是根据测压管水深随时间变化过程计算得出的平均值,更能代表水深的实际平均值。这说明提出的基于图像识别技术的测压管群水深智能获取方法有效可行。

表1 水深特征值对照Tab. 1 Comparison of water depth characteristic values
4 结 语
(1)本文提出了基于图像识别技术的测压管群水深智能获取方法及其水深获取系统。系统由图像采集系统和软件识别系统组成,可同时获取多个测压管内水深随时间的变化过程,迅速得出同一时刻内预定水域的水面变化状态。
(2)软件识别系统针对多测压管群水面变化特点,采用灰度化、二值化及开操作等对图像进行预处理,显著提高了浮标的准确识别效率。
(3)与传统人工测量方法相比,该方法自动化程度高,人工成本低,可有效避免人为误差,数据更加可信;能统计出水深的最大值、最小值等特征参数、水深变化过程,数据更加全面,且特征值的统计结果与人工统计结果误差在±1.5%以内。因而,研究提出的测压管群水深智能获取方法可应用于实际工程。