基于模糊PID算法的电机调速系统设计
2022-10-28白盼盼聂文艳
白盼盼,聂文艳
(淮南师范学院 机械与电气工程学院,安徽 淮南 232000)
“中国制造2025”涉及十大领域,数控机床和高质量的机器人是主要的研究领域之一[1],直流电动机作为重要的机电能量转换装置,控制其达到最佳性能是推动制造业飞速发展的动力.从应用广度方面来看转速、电流双闭环控制系统在当前直流电动机调速系统中具备充分的优势,其技术较为成熟而且可靠性较高[2].之前,直流电动机常采用常规PID算法来实现转速的控制,如果直流电动机拖动的负载突变,常规PID算法难以满足高精度、高效率和高性能的调速要求.从智能应变角度来看模糊PID控制器长久有效的控制经验可以促进控制系统不断优化以及控制策略的有效调整,进而促进直流电机性能的充分发挥[3].
1 双闭环直流调速系统
双闭环直流调速系统由ASR(速度调节器)和ACR(电流调节器)构成.系统构建如图1所示.本系统内2个调节器的调节作用只有在未达限幅条件下凸显,如输出值已凸显为恒定则表明调节器已达限幅,系统只有在反向信号的出现时才会退出恒定饱和[4].
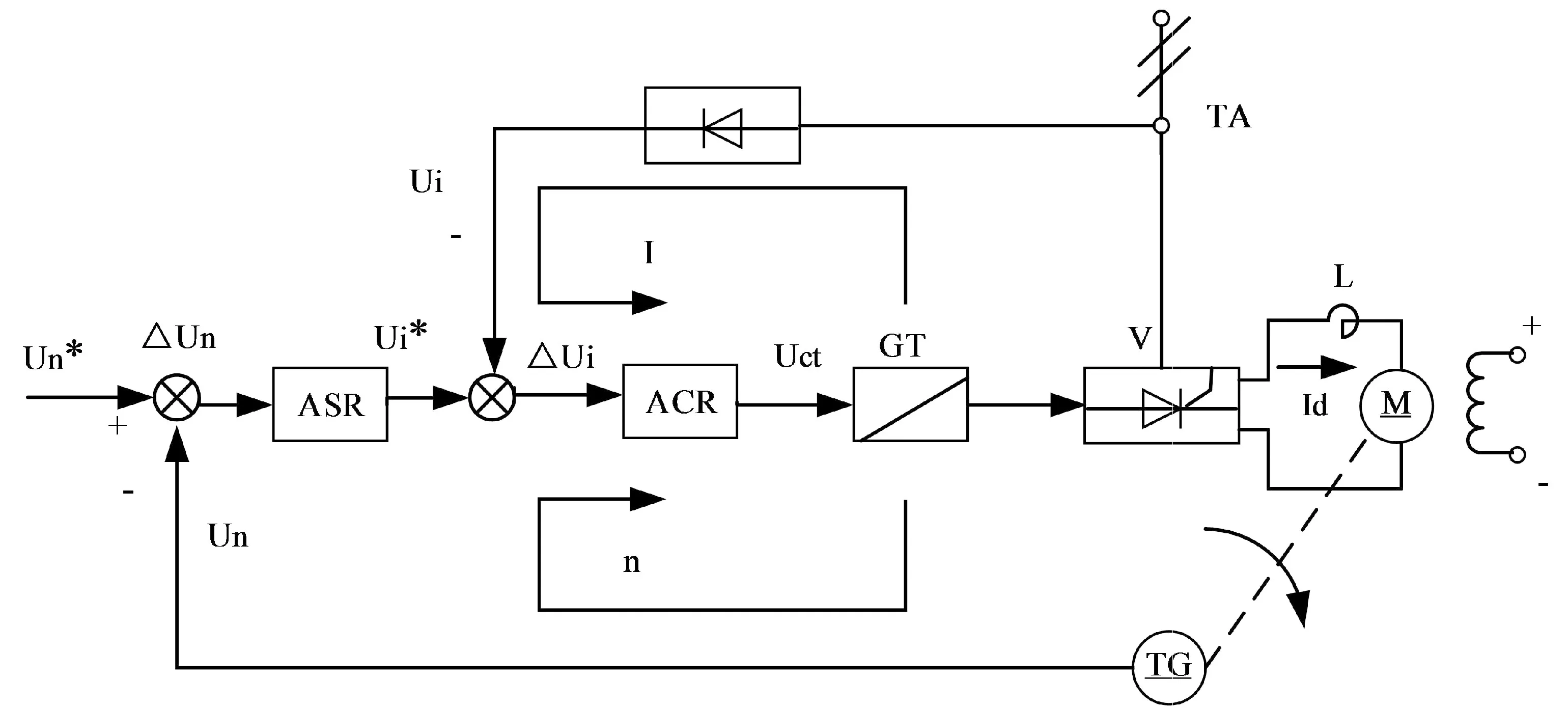
图1 双闭环直流调速控制系统
2 模糊控制策略
如图2所示,模糊控制原理方框图内部的主要部分是模糊控制器,主要控制内核包含模糊化集合、语言变量及逻辑推理[5].
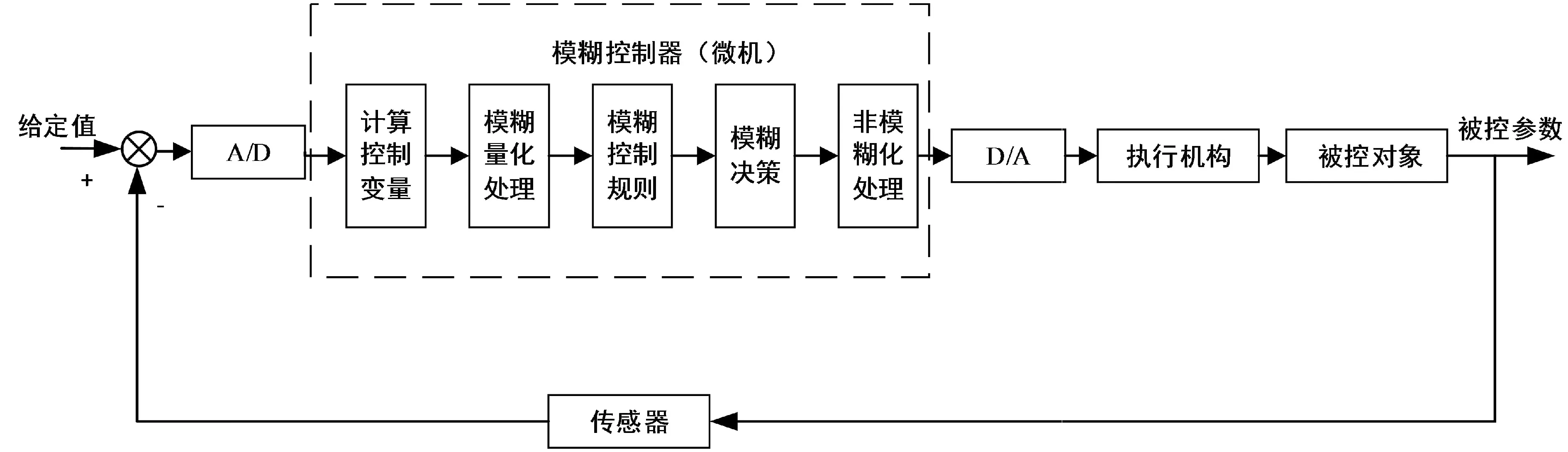
图2 模糊控制原理方框图
2.1 模糊控制器
如图3所示模糊PID控制器基于模糊推理机及参数整定的PID调节器实现控制作用,系统内输入量为e(误差)及ec(误差变化率),输出量为以常规PID控制器的参数kp、ki和kd.
采用模糊PID控制器,输入量为转速的e(误差)以及转速ec(误差变化率),输出量为常规PID控制器的参数kp、ki和kd.找出常规PID控制器参数kp、ki和kd与速度误差e、误差变化率ec彼此之间的模糊相互有效关系,再使用模糊推理机对参数kp、ki和kd进行整定.将直流电动机调速系统期望值与实测值进行比较,计算出转速e以及转速ec,并以{-3-2-10123}作为其论域范围,把e和ec的模糊子集合分别定义为{NBNMNSZOPSPMPB}[6].
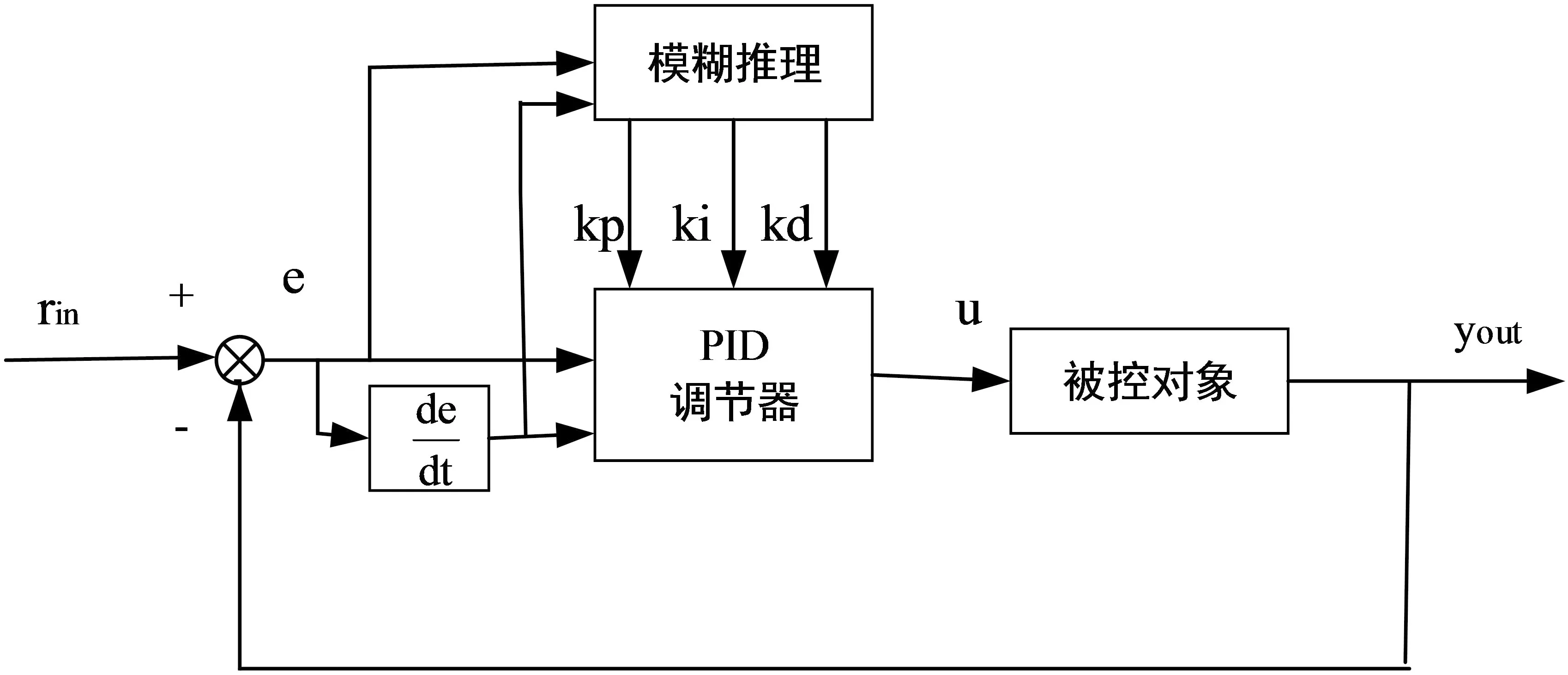
图3 模糊PID控制器的结构方框图
2.2 模糊控制策略
模糊PID控制器的核心控制策略是由“IF A and B Then C”条件语言构成[7].通过不断地工程实践经验,模糊规则表如表1至表3所示.
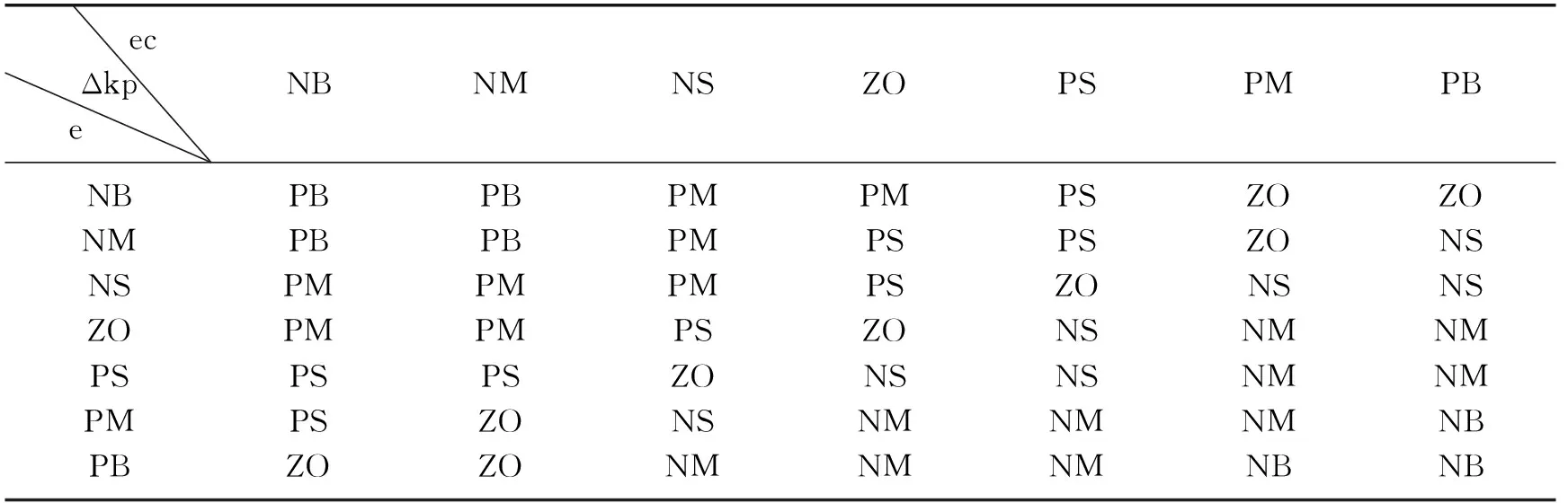
表1 模糊控制规则表(kp)
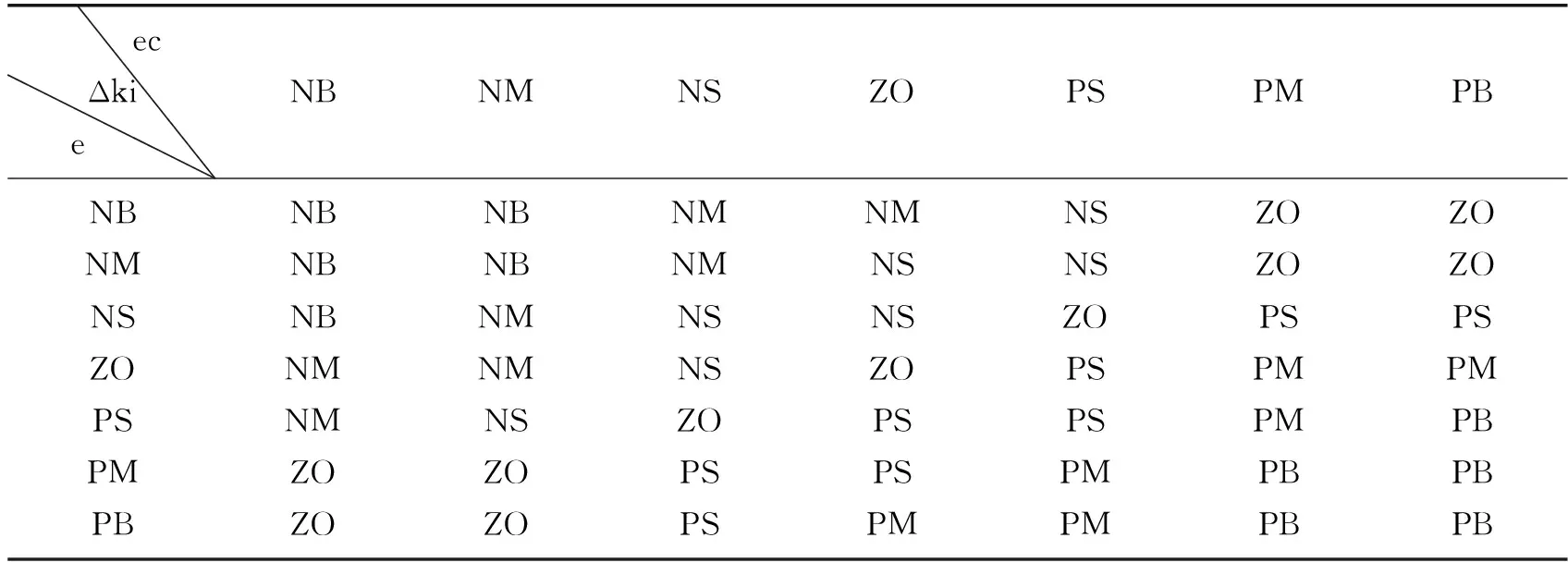
表2 模糊控制规则表(ki)
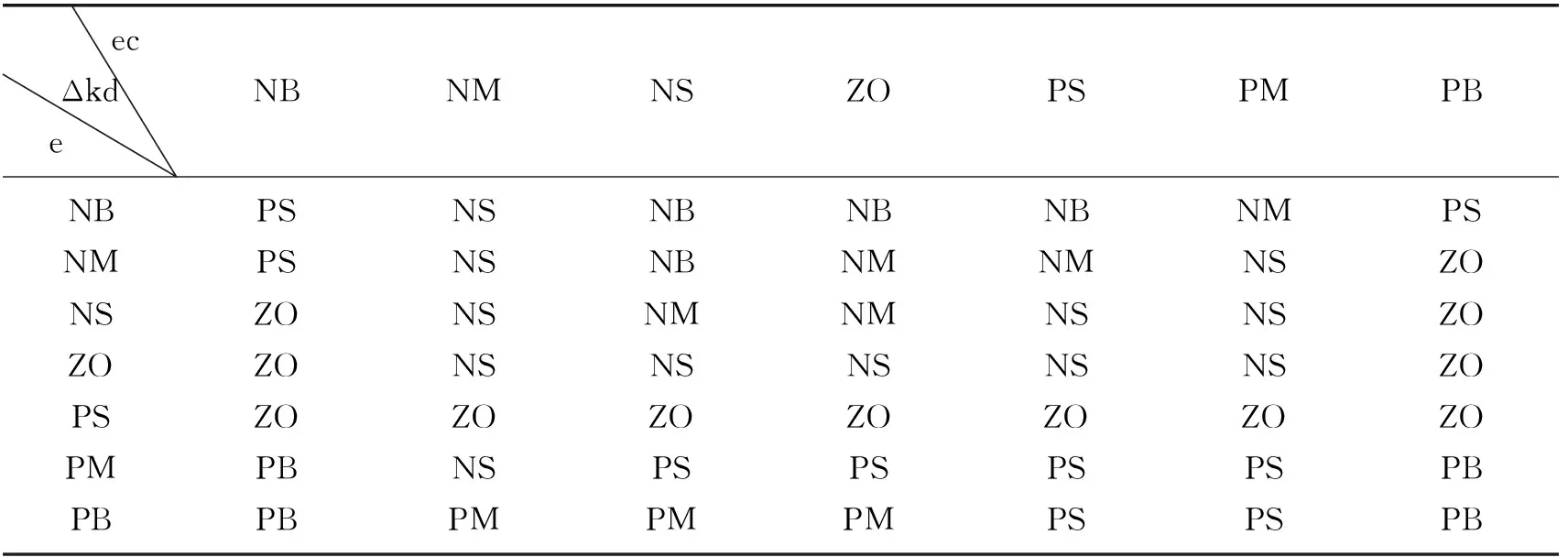
表3 模糊控制规则表(kd)
3 系统仿真
3.1 直流电动机双闭环调速系统应用常规PID算法控制仿真
打开MATLAB,点击Simulink工具箱,建立Blank Model,点击Simulink Library Browser.把采用工程设计的双闭环速度控制系统的参数输入各个模块,点击Run运行调试,待运行调试无误,可点击示波器观察仿真结果,如图4所示.
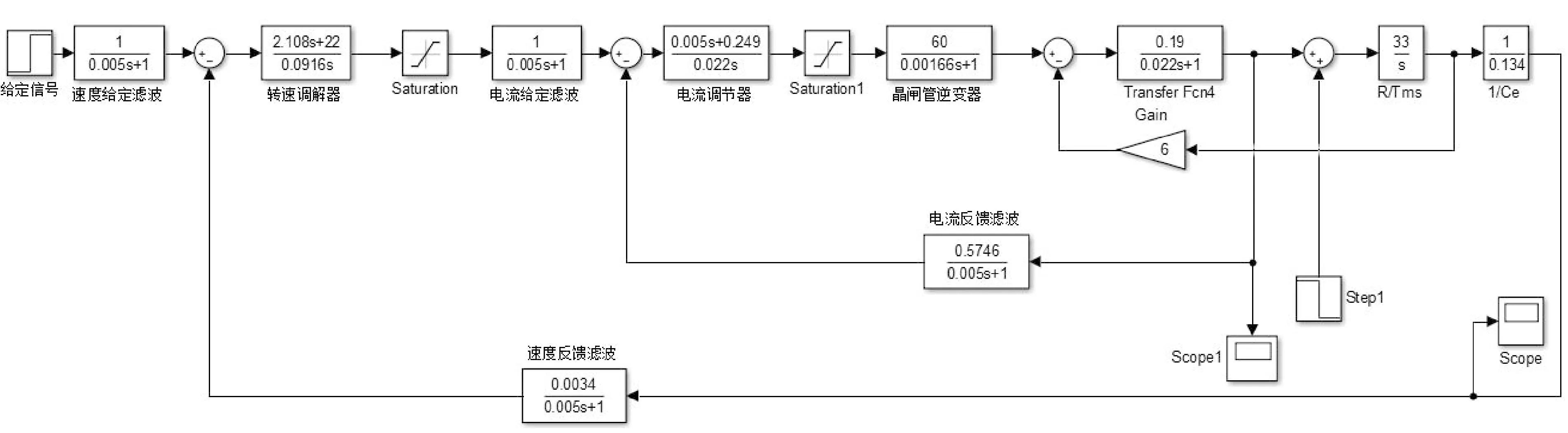
图4 常规PID算法控制直流双闭环调速系统仿真模型
3.2 直流电动机双闭环调速系统应用模糊PID算法控制仿真
Edit→Membership Functions Edits,对输入以及输出的隶属函数进行设置.选择Edit→Add MFs→MFs Tyre菜单项,选择三角形隶属度函数.输入变化量e的论域取为[-3 3],词集合为{NB NM NS ZO PS PM PB},ec的理论域值取为[-3 3],词集合采用{NB NM NS ZO PS PM PB},kp,ki和kd的论域分别取为[-1.5 1.5],词集合采用{NB NM NS ZO PS PM PB},再采用Add rule把49条规则逐一设置到该界面中,点击View→Surface选项,显示出模糊控制器的输入/输出的关系曲线图.建立好模糊控制器以后,就会生成一个fuzzy2. fis文件,在Simulink中,创建了模糊PID算法控制的直流双闭环调速系统的仿真模型,如图5所示.
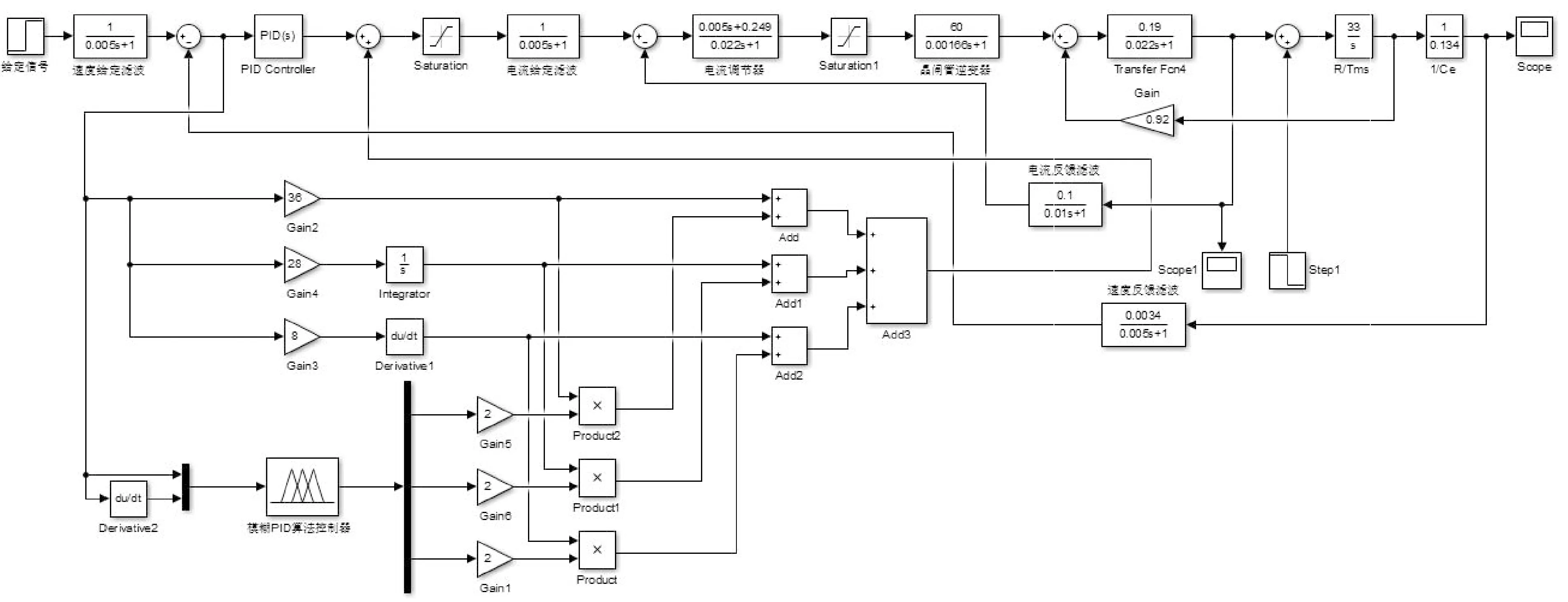
图5 直流电动机双闭环调速系统应用模糊PID算法控制仿真模型
4 结果与分析
通过实验统计可以得出两种控制方式所输出的波形结果,其中图6所示为应用常规PID算法控制输出波形结果,而图7所示为应用模糊PID算法控制输出波形结果.
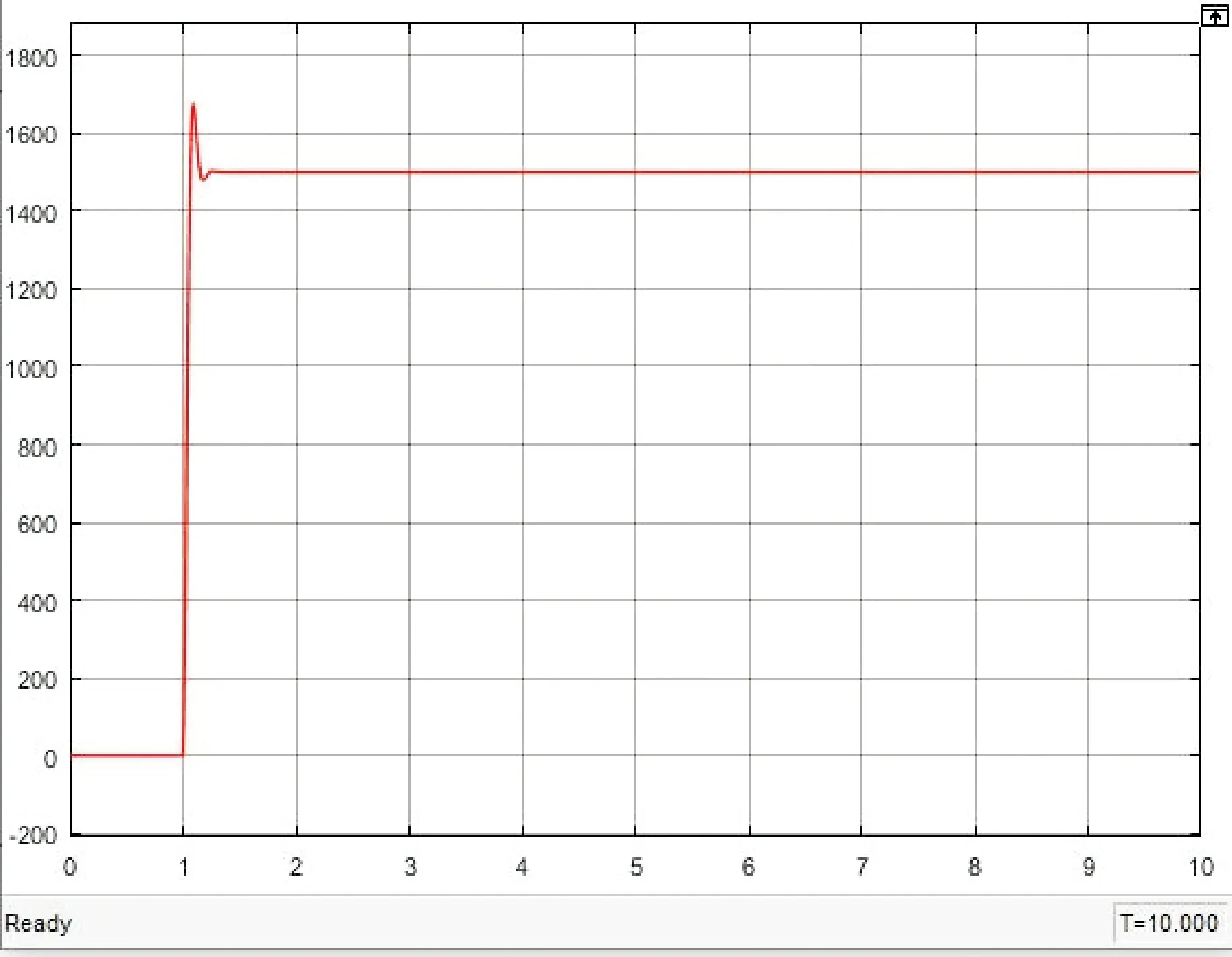
图6 常规PID算法控制输出波形
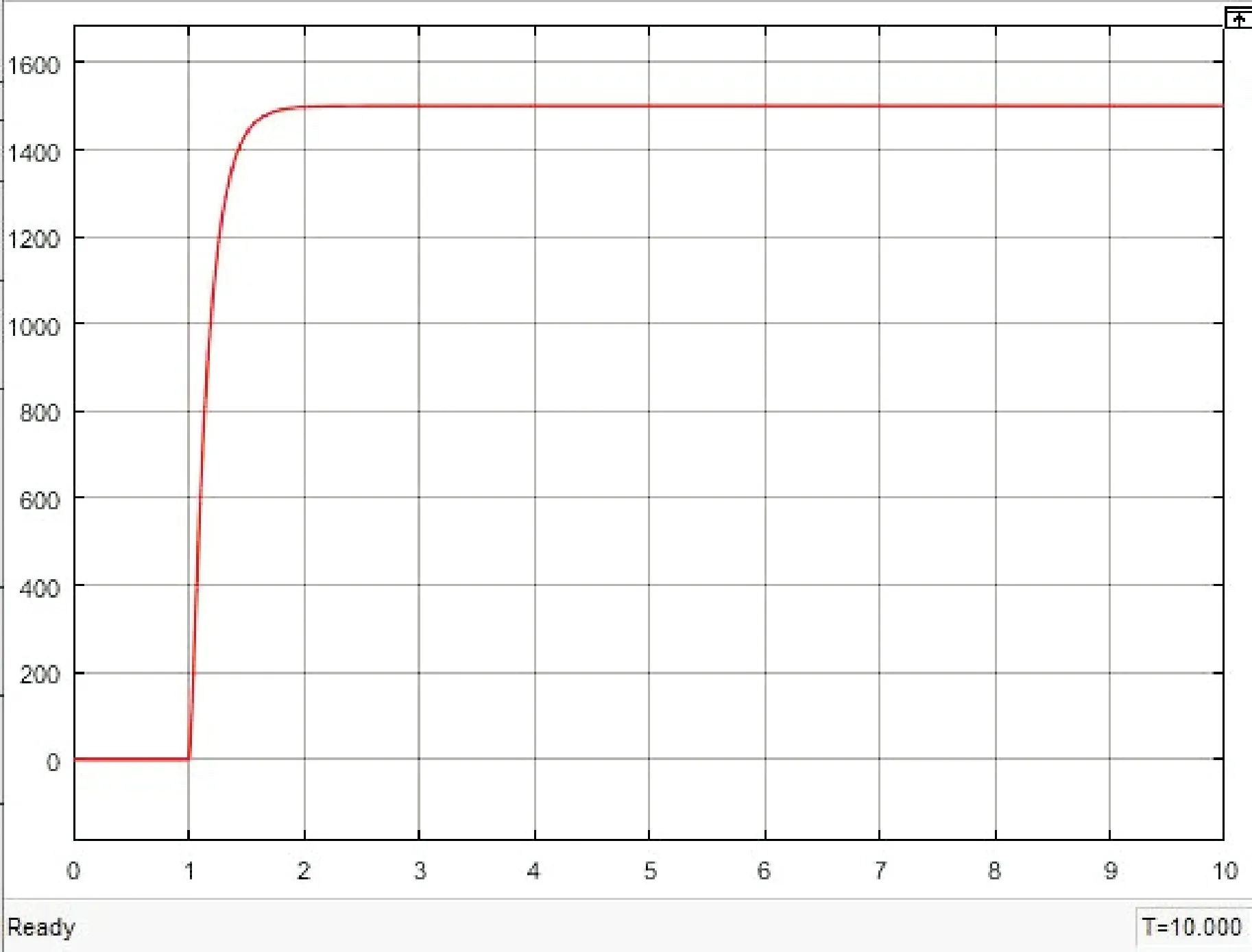
图7 模糊PID算法控制输出波形

