基于LoRa和SVM-Markov的蓝莓园精准灌溉系统研究*
2022-10-27吴丹刘永华吴玉娟
吴丹,刘永华,吴玉娟
(江苏农林职业技术学院,江苏句容,212400)
0 引言
蓝莓营养价值高,深受大众喜爱,2020年我国蓝莓栽培面积达到了66.4 khm2[1-2],面积和产量均居世界第一位。蓝莓种植对水分要求较高,既怕涝又怕旱,目前多采用传统的漫灌、沟灌等灌溉方式,每次灌溉水量的多少主要通过人工判断土壤含水量和种植经验来确定,即使采用滴灌方式也是如此,不仅不能适时适量灌水,还造成蓝莓枝条发育不良、叶片失绿、产量和品质不高[3-5]。因此精准控制灌溉量是蓝莓增产增收的重要手段。
物联网技术的应用给农业生产带来了巨大的变革,目前农业物联网中大部分采用ZigBee技术来实现数据的采集,但ZigBee技术无法兼备低功耗和远距离传输及可靠性的需求[6],考虑到蓝莓园的面积较大,需要布置的传感器节点较多,如果使用传统的485有线通讯或ZigBee无线通讯,受施工难度和通讯距离较短等影响,对环境参数采集带来不便。而LoRa技术在同样的功耗条件下比其他无线方式传播的距离更远,解决了功耗与传输覆盖距离的矛盾问题。故设计基于LoRa的无线环境监测系统[7]。
国内相关科技工作者针对灌溉系统开展了相关研究。沈建炜[8]设计了一种基于物联网技术、彭曼原理、BP神经网络和土壤水分平衡原理的蓝莓园智能灌溉系统,能实现灌溉预报,但采集数据过多,造成系统处理数据工作量加大。任朝阳[9]设计实现了基于模糊算法的桃园物联网灌溉系统,通过LoRa技术实现精准灌溉,但只采集桃园土壤湿度参数,传感器类型较少,没有考虑其他影响灌溉的因素。
常用的预测方法有回归分析预测法、时间序列预测法、马尔科夫预测法、灰色预测法、人工神经网络预测法、小波分析预测法、支持向量机预测法、模糊预测法等[10]。通过对各预测方法特点的对比分析,最终选用了支持向量机和马尔科夫相结合的预测模型。支持向量机算法在样本很小的情况下也有很好的推广能力[10];马尔科夫模型适用于波动较大的数据的预测[11],可以对支持向量机预测的数据进行修正,以获得更高的预测精度。
综上,本文针对蓝莓需水特性搭建了一个基于LoRa的无线传输技术与SVM-Markov模型相结合的灌溉系统,利用SVM-Markov模型对蓝莓园灌溉量进行精准预测,预测结果反馈到控制系统,控制系统根据预测结果控制电磁阀的开启与关闭,以此对蓝莓园进行精准灌溉。
1 蓝莓园精准灌溉系统框架设计
系统由环境监测、控制执行、远程监控三个部分组成。其中环境监测包括环境温湿度、光照强度、风速、土壤湿度等要素;控制执行主要是对蓝莓园内的电磁阀、水泵等执行机构进行操控;远程监控由网关、云服务器等组成。图1所示为系统框架图。

图1 系统框架图
LoRa-485数据采集器与LoRa网关进行无线通信,采集器与传感器之间通过RS-485通道,MODBUS-RTU协议进行通讯,物联网关网关解析接收LoRa网关采集到环境参数,并通过4G发送到指定云服务器。在需要被监测的区域,安装传感器和LoRa-485采集器并提供电源即可实现对该区域的环境温湿度、光照强度、风速、土壤湿度等参数的采集,极大地方便了对果园的分布式环境监测。
为了实现远程对蓝莓园的电磁阀和水泵进行操控,设计和开发了远程监控系统,操作人员可在远程监控系统上下达指令,通过LoRa网关命令LoRa继电器控制器控制电磁阀和灌溉水泵的启动与停止。
通过计算机WEB端远程对蓝莓园的环境参数进行采集,LoRa-485数据采集器自动采集数据并发送至服务器,当WEB端需要数据时即从服务器端调用。
服务器端利用SVM-Markov模型自动处理采集到的环境数据,将结果实时反馈给控制系统,从而达到自动精准灌溉的目的。
2 灌溉预测模型建立
2.1 预测模型选择
灌溉预测模型建立的基本思路为:根据当天的土壤湿度、空气温湿度、光照度、风速等参数和当天的实际灌溉量,预测第二天的灌溉量,为第二天的灌溉决策提供依据。其中实际灌溉量是由有经验的种植户采用手动灌溉方式获得的数据。但是蓝莓生长过程分为萌芽期、开花期、坐果期和成熟期[12],每个时期的温湿度和灌溉量差别较大,即数据波动性较大,而灌溉模型的预测精度会直接影响到灌溉量的精准与否,因此选择合适的预测模型显得尤为重要。
2.2 支持向量机模型
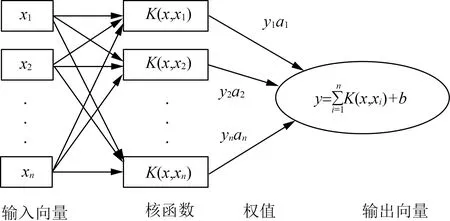
图2 SVM结构示意图
2.3 马尔科夫模型
马尔科夫(Markov)过程最大的特点是无后效性,即事物的发展过程中,每次状态的转移仅与当前状态有关,与过去的状态无关[15-17]。模型构建步骤如下。
把数据划分成n个状态,任一状态记为En。则状态转移概率
(1)
式中:pij——从目前状态Ei到各种状态Ej(j=1,2,…,m)的概率;
Mij——从状态Ei到Ej的转移个数;
Mi——处于状态Ei的原始数据的个数。
最后,构成相应的状态转移概率矩阵,如式(2)所示。
(2)
本文仅考虑一步状态转移概率矩阵,通过该矩阵,就可以求得未来的转移状态区间,进而可求出待预测点的预测值。
2.4 SVM-Markov组合模型
单一的预测方法因其理论的特点,预测精度不高,因此本文提出组合模型的预测方法。由于蓝莓园温湿度、光照度、风速、土壤湿度具有波动性,因此本文提出支持向量机和马尔科夫组合模型预测方法,以提高预测精度。预测建模流程图如图3所示。
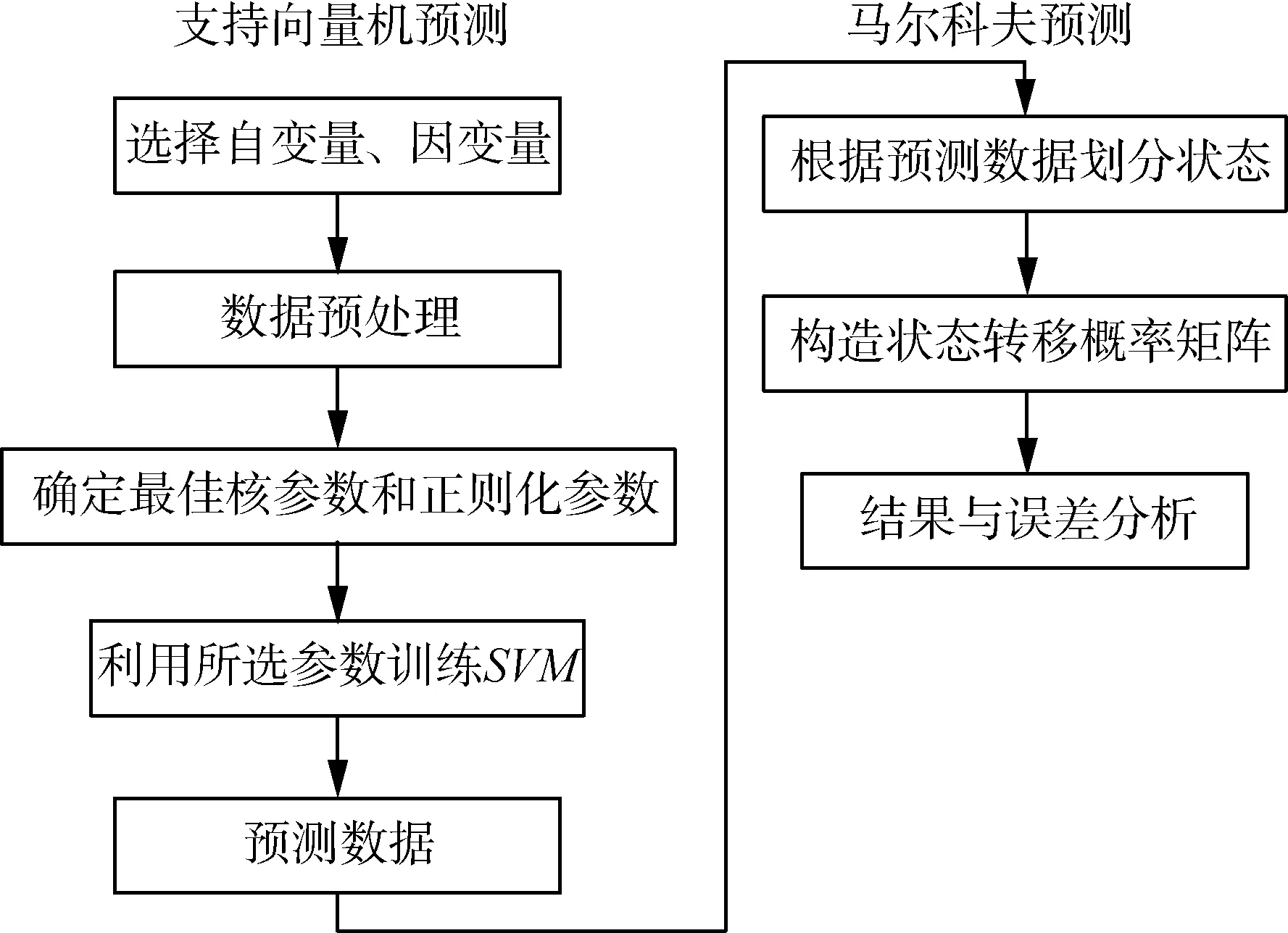
图3 支持向量机和马尔科夫的组合预测建模流程图
1) 自变量、因变量的选择。将前一天的空气温湿度、光照度、风速、土壤湿度和实际灌溉量作为自变量,当天的灌溉总量作为因变量。
2) 数据预处理。首先将数据进行归一化处理,即将样本映射到[0, 1]区间。归一化公式如式(3)所示。
(3)
式中:xi——原始数据;
xi′——归一化数据;
ximax——原始数据中的最大值;
ximin——原始数据中的最小值。
将归一化的数据用于SVM预测模型,得到归一化预测值。再将归一化预测值进行反归一化。
x*=x′*(xmax-xmin)xmin
(4)
式中:x*——反归一化后数据;
x′*——归一化后数据。
3) 最佳核参数和正则化参数的确定。本文选择径向基(RBF)核函数,如式(5)所示。
(5)
用式(5)确定正则化参数C和核参数σ。采用交叉验证的方法对参数进行选择,根据误差最小来选择参数,并且利用所选参数进行SVM训练。
4) SVM数据预测。根据所选参数进行预测,在实际应用时还应继续减小相对误差范围,因此需要用马尔科夫链进行修正。
5) Markov状态划分。将SVM预测误差加以划分,本文将误差划分为4个等距离状态E1~E4。
6) 构造一步转移概率矩阵。根据Markov的4个等距状态得到一步状态转移概率为
(6)

SVM-Markov预测值=SVM×[1-z(i)]
(7)
3 系统设计与实现
3.1 硬件设计
蓝莓园精准灌溉系统的硬件包括LoRa模块、单片机MCU、各传感器及水泵等执行设备,如图4所示。LoRa主模块和2个子模块进行通讯,LoRa主模块通过MCU和4G模块进行数据的交换,4G模块的作用是实现和云服务器的通讯;LoRa子模块1通过MCU控制灌溉水泵的启停和电磁阀的启停;LoRa子模块2通过MCU用来收集各传感器的数据。
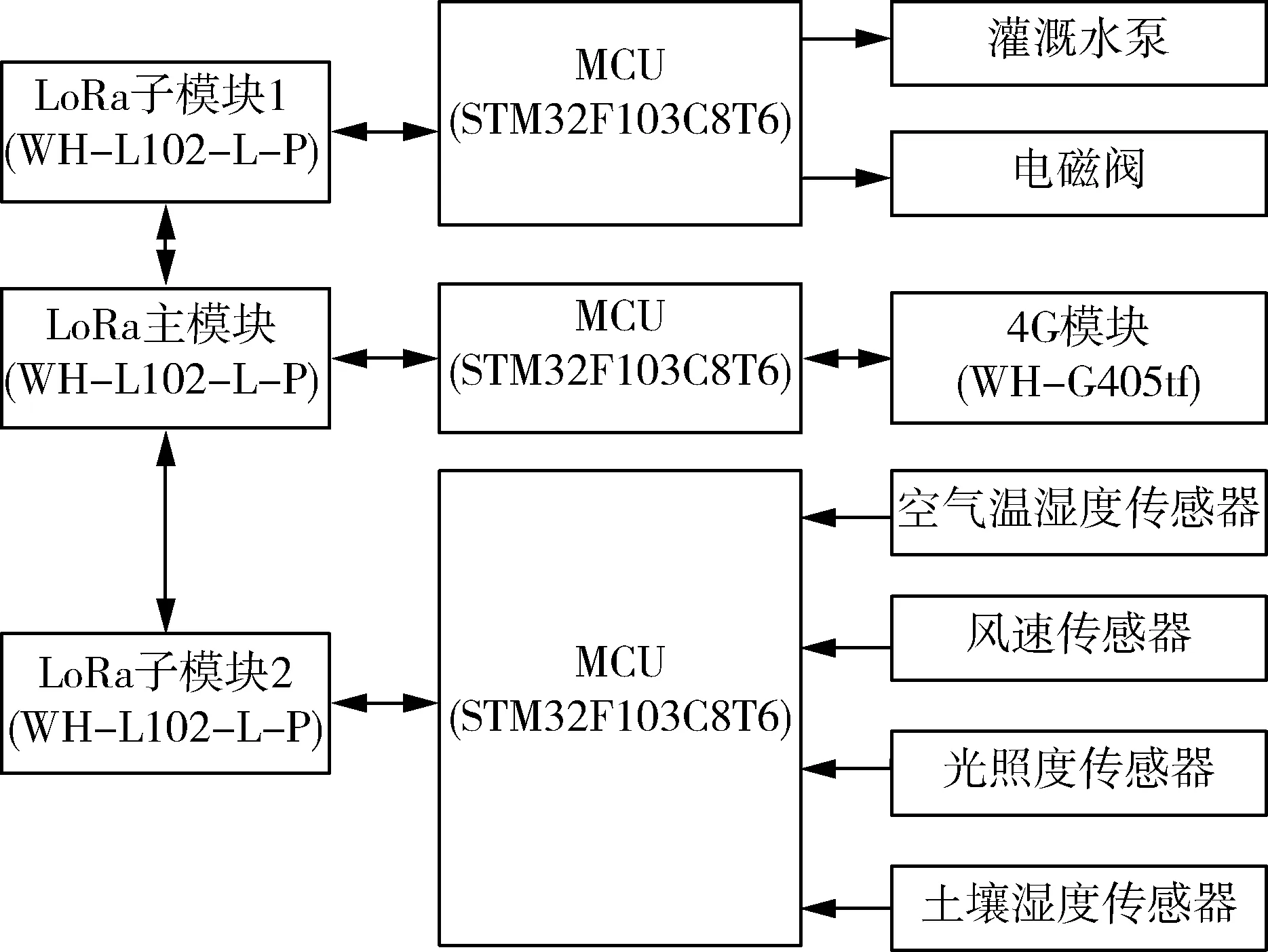
图4 系统硬件原理框图
蓝莓园的环境数据包括空气温湿度、光照度、土壤湿度等。空气温湿度传感器选用RS-WS-120-2-6温湿度变送器;光照度传感器选用SM3560电流型光照度传感器;风速传感器选用PR-3000-FS型风速变送器;土壤湿度传感器选用RS-WS-NO1-TRt土壤温湿度变送器。
3.2 灌溉工作过程设计
蓝莓园精准灌溉系统的工作流程如图5所示。首先利用LoRa-485数据采集器进行当天的传感器数据采集(系统设置为每隔1 h采集1次);再利用云服务器进行数据处理,包括选取当天的最高气温和最低气温、计算当天空气湿度平均值、光照总辐射强度、距离地面10 m风速平均值、土壤湿度平均值、利用流量计获得当天实际灌溉量;其次利用SVM-Markov模型进行数据分析计算,预测第二天的灌溉量;最后进行灌溉决策,如果预测第二天的灌溉量为0,则回到数据采集与处理状态,如果灌溉量不为0,则在第二天早上6:00开启电磁阀和水泵进行灌溉,达到灌溉量后关闭电磁阀和水泵。
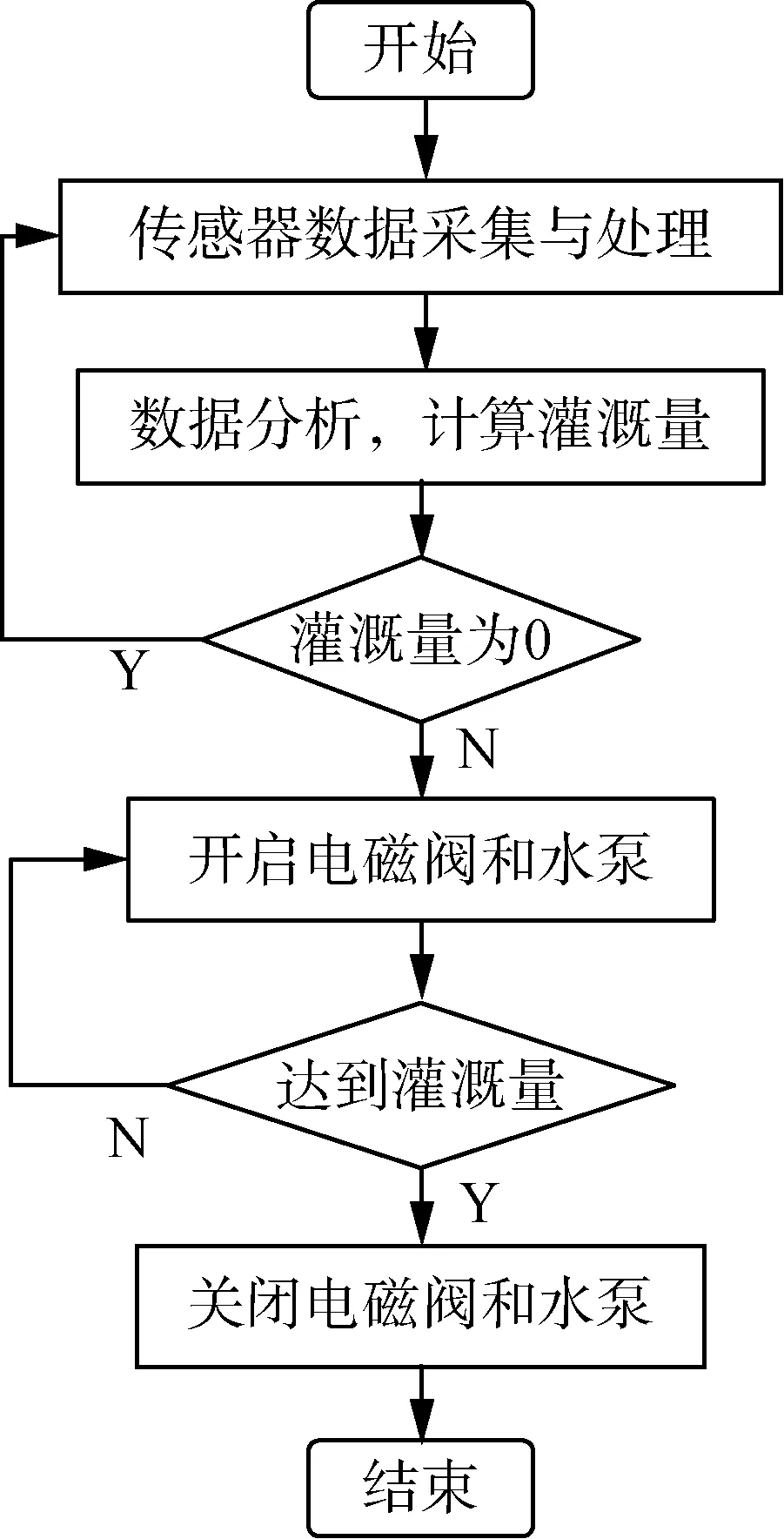
图5 灌溉系统工作流程
3.3 监控系统设计
云服务器监控系统分为手动控制和自动控制两种方式。手动控制较简单,农户可以根据实际需要在监控系统界面手动下发控制指令,控制电磁阀和水泵是否开启进行滴灌作业。自动控制可以方便农户随时获得蓝莓园的环境数据和监测当天滴灌量,并根据如图5所示的灌溉系统工作流程,完成蓝莓园的自动灌溉。
4 测试结果与分析
以江苏句容天王镇某蓝莓园作为试验对象,蓝莓品种为奥尼尔,采用滴灌方式,如图6所示。

(a) 蓝莓园 (b) 滴灌模块
试验环境:精准灌溉系统中有灌溉水泵1台,其上安装有2个电磁阀,每个电磁阀控制72个滴灌模块,每棵蓝莓树上安装有1个滴灌模块,即1个电磁阀可以完成72棵蓝莓树的滴灌工作。
试验方法:在试验基地中选取一小块试验田标为1#田,1#试验田规模约为160 m2,共种有蓝莓树72棵。1#田中安装有空气温湿度传感器1个、光照度传感器1个、离地10 m的风速传感器1个、土层下10 cm的土壤湿度传感器1个,再取一小块试验田标为2#田,2#试验田规模约为160 m2。2#田主要用来获取实际灌溉量的数据,实际灌溉量由种植户根据当天环境数据和土壤湿度数据,再加上种植户自身的丰富灌溉经验手动控制电磁阀进行灌溉获得。
数据来源:本次使用的数据为蓝莓的成熟期中7月24日至8月31日采集到的空气温湿度、光照度、风速、土壤湿度、实际滴灌量共计39天数据。图7为蓝莓园采集数据曲线图。

(a) 最高温度和最低温度曲线图 (b) 空气相对湿度曲线图
首先,利用MATLAB中的LIBSVM工具箱,通过对图7数据的分析和计算,得到SVM预测值,如图8所示,再和实际需水量进行对比得到两者的误差。
SVM误差=SVM预测值-实际需水量
(8)
如图9所示,得到SVM的预测误差上限和下限分别为1.75、-1.7 mm/d。
其次,根据误差的上下限划分处4个等距状态,分别为E1=[-1.76,-0.88),E2=[-0.88,0),E3=[0,0.88),E4=[0.88,1.76)。
再次,根据式(6),得到一步转移概率矩阵,如式(9)所示。
(9)
最后,采用式(7)进行马尔科夫修正,得到SVM-Markov预测值,再和实际需水量进行对比得到SVM-Markov预测误差,如图9所示。SVM-Markov的预测误差上限和下限分别为0.43、-0.41 mm/d,通过和SVM预测误差的上限和下限对比后发现误差大幅度降低。
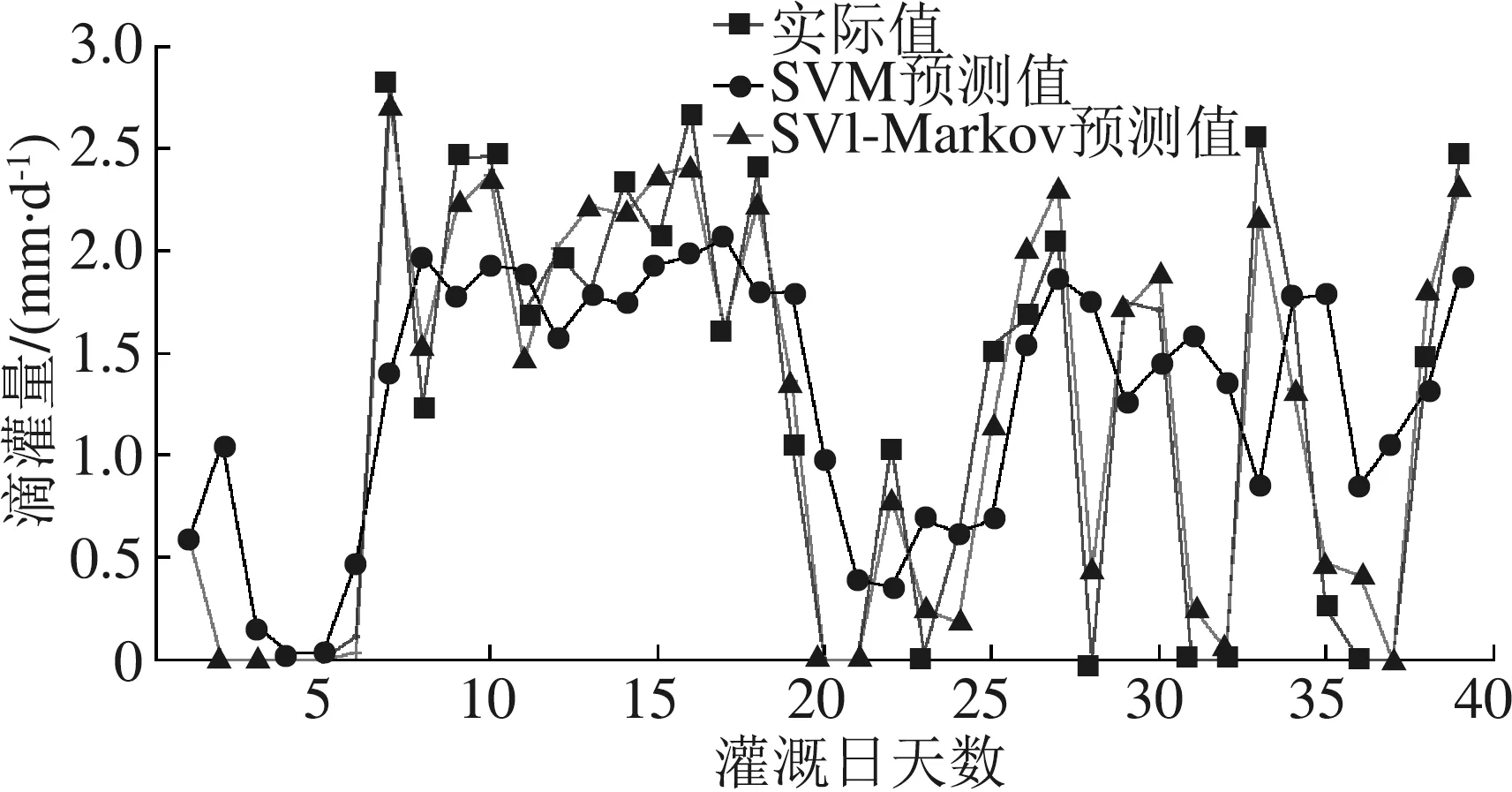
图8 两种预测模型的预测值与实际值比较

图9 两种预测模型的误差比较
此外,采用平均绝对误差MAE和均方根误差RMSE也可用来反应数据拟合的好坏。SVM-Markov模型的平均绝对误差为0.188 7 mm/d,均方根误差为0.239 4 mm/d;SVM模型的平均绝对误差为0.618 7 mm/d,均方根误差为0.797 mm/d。由此可见,组合模型的拟合度远高于单一模型的拟合度,对滴灌量的预测更为精确,可以很好的指导蓝莓园精准灌溉。
(10)
(11)
5 结论
本文设计了基于LoRa无线远距离通信和SVM-Markov 组合模型的蓝莓园精准灌溉系统。系统由环境监测、控制执行、远程监控三个部分组成。以句容市天王镇蓝莓园为试验对象,首先由LoRa无线数据采集系统通过LoRa-485数据采集器与LoRa网关进行无线通信,采集器与传感器之间通过RS-485通道、MODBUS-RTU协议进行通讯,物联网网关解析接收LoRa网关采集到的空气温湿度、土壤湿度、光照度、风速等环境参数;其次将采集到的环境参数和实际滴灌量数据输入SVM-Markov模型,采用MATLAB的LIBSVM工具箱进行数据分析,完成下一阶段的蓝莓园滴灌量预测。
预测结果表明,SVM-Markov模型的平均绝对误差为0.188 7 mm/d,均方根误差为0.239 4 mm/d,而SVM模型的平均绝对误差为0.618 7 mm/d,均方根误差为0.797 mm/d。采用SVM-Markov组合模型的预测精度更高、数据拟合效果更好,能更好地完成蓝莓园的精准灌溉。
通过果园信息的实时采集与监测,结合LoRa物联网与SVM-Markov构成的精准灌溉系统不仅可以应用于蓝莓园,也可以推广应用到其他果园,对提高水果质量、降低人工灌溉强度、提高灌溉效率、优化水资源利用等具有一定的参考意义。