增程式电动拖拉机研究进展*
2022-10-27杨杭旭刘冬梅周俊汪珍珍王旭
杨杭旭,刘冬梅,周俊,汪珍珍,王旭
(1. 南京农业大学工学院,南京市,210031;2. 金华职业技术学院机电工程学院,浙江金华,321017;3. 浙江省农作物收获装备技术重点实验室,浙江金华,321017)
0 引言
随着农机设备向大型化、多功能化发展,在农作物产销量持续增长和耕种收获机械化水平不断提髙的同时,也带来了能源的大量消耗和环境污染[1-4]。因此,现代农业新业态对生态、节能、环保提出了越来越高的要求,特殊农业生产环境下对零排放、无污染、低噪音的绿色动力农机具的需求越来越迫切,而拖拉机作为主要的农业机械,电动化的发展趋势迫在眉睫。当今,随着各国对环保重视以及智能化、电动化技术进步,尤其是电动汽车领域三电(电池、电机、电控)技术取得的突破,大大推动了电动拖拉机的发展,诸如美国约翰迪尔、中国一拖等大公司、企业均已开展相关研究并不断研制出新机型投放市场[5-8]。尽管电动拖拉机能实现零排放、零污染,但单一的能量来源致使续航里程受限,难以满足大功率拖拉机持续作业需求,可以采用柴电增程器来提升电动拖拉机的续航能力,并通过实施一定的主动控制策略与能量管理策略,降低系统燃油消耗率[9]。然而,对于增程式电动拖拉机来说最大的问题是在行程结束时,动力电池的电量仍然很高,电量没有得到充分使用,围绕动力电池电耗以及柴油车油耗能量管理策略以及相关参数的设计、调整十分关键;同时,由于增程式电动汽车技术、管理策略等相对比较成熟[10-11],在考虑拖拉机自身特点的前提下,一定程度借鉴增程式电动汽车在控制策略、能量管理方面的技术方案,对推动增程式电动拖拉机领域发展也具有相当意义。
鉴于此,本文围绕增程式电动汽车动力系统参数设计、能量管理策略、增程式电动拖拉机相关技术等方面展开评述,并对增程式电动拖拉机控制策略、能量管理方面未来的研究提出建议,以期为增程式电动拖拉机研制、推广和运用提供借鉴与参考。
1 增程式电动汽车相关技术
增程式电动汽车是在纯电动汽车基本结构基础上,增加了一个含有柴油机(内燃机)的增程器[12-13],如图1所示,相比与纯电动汽车,设计自由度大、续航里程高、电池使用耐久度大,是一种发展前景非常好的新能源汽车类型,增程式电动汽车核心在于动力系统以及能量管理策略。
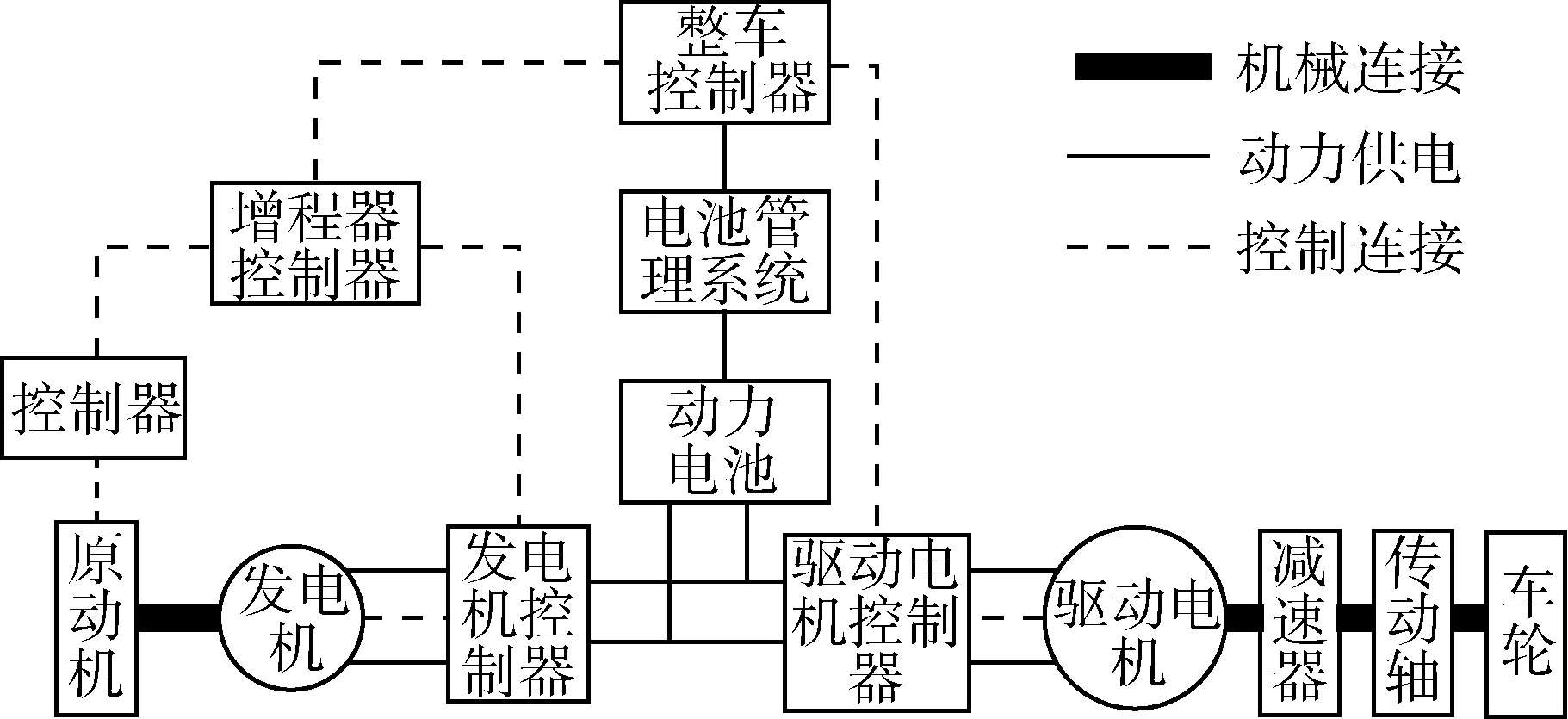
图1 增程式电动汽车结构示意图
1.1 动力系统研究
增程式电动汽车存在多个动力源,多个动力系统建模、参数匹配关系到后续能量管理策略的效果。目前已发表的文献中大部分是对于混合动力汽车动力系统参数匹配研究,专门针对增程式电动汽车开展动力系统设计、参数匹配的研究不多。例如,蒋建华等[14]以续航里程和动力性为目标,设计了增程式电动汽车动力系统参数,并采用了增程器恒功率控制策略验证了其设计效果;黄欣等[15]以整车制造成本、汽车等效百公里加速时间和百公里油耗为目标,以电机峰值功率、电池能量以及发动机额定功率为变量,设计了基于线性加权的多目标遗传算法,最后进行了试验验证;周苏等[16]采用了定点能量管理策略对设计的某款增程式电动汽车动力系统进行了分析和验证。
1.2 能量管理控制策略研究
能量管理策略是增程式电动汽车技术研究的热点,也是难点。其目标是对多个能量源之间的动力进行优化和分配,使其在满足动力性同时,兼顾经济性和排放性。目前对于增程式电动汽车的控制策略主要有三种,即全局最优控制策略、基于规则的逻辑门限控制策略以及智能控制策略(包括模糊控制、神经网络控制、动态规划以及其他各种智能优化控制方法),对于上述控制策略,学者们开展了一定的研究。窦国伟等[17]提出了一种基于模糊控制的算法的增程式电动汽车多能源能量分配控制策略,设计了模糊控制器(图2),综合考核电池SOC与驱动电机功率需求,仿真验证了策略有效性,结果表明:在电机需求功率为负时,输出功率均在5 kW以下,当SOC值为0.9时,输出功率88 kW,SOC越高,电池功率输出能力越高;盘朝奉等[18]也提出了基于模糊控制的稳态能量分配策略,采用单输出、双输入的二维结构,以驱动电机需求功率和SOC为输入,辅助动力单元需求功率为输出,最后利用Cruise以及Simulink进行联合仿真,整车油耗为5.94 km/L,效果良好;贺俊杰等[19]为了对汽车增程器进行有效控制同时,兼顾动力电池组寿命,研究了一种基于模糊控制的恒温器策略与功率跟随相结合的能量管理策略,该策略对比功率跟随策略,油耗消化率达到了16%,同时将发动机工作点控制在最优燃油附近,改善了排放与增程器效率;胡瑾瑜等[20]以燃料电池堆作为增程器的增程式电动汽车为例,提出了一种综合电池充放电效率和燃料电池效率的能量管理策略,并基于神经网络将策略实现,在常规工况下续航里程增加3.32%;Chen等[21]利用动态规划算法对增程式电动汽车能量管理策略进行设计与研究;朱龙飞等[22]以提高整车燃油经济性为目标,也利用动态规划方法得到燃油消耗最优值以及最优控制,建立基于逻辑门限值的控制策略,最后借助遗传算法对策略主要参数进行了优化,优化后整车燃油消耗与最优理论误差仅为2.8%;席利贺等[23]开展了基于动态规划与神经网络的增程式电动汽车能量管理策略研究,设计了一种具有实时控制能力的增程式电动汽车能量管理策略,针对动态规划算法(动态规划算法求解示意图如图3所示)需要基于实际具体工况而信息实际困难的缺点,借助了BP神经网络算法进行离线训练(图4为构建的BP神经网络结构),最终进行了硬件在环仿真试验,提高了燃油经济性;张承宁等[24]提出了一种基于Pontryagin 极小值原理的增程式电动车辆电量维持阶段控制策略,分析了其能实现SOC维持控制的机理,相比于传统开关控制策略,燃油经济性最高能提高5.8%;徐群群等[25]针对传统遗传算法易收敛于局部最优(图5为遗传算法的优化流程),无法达到全局最优的缺陷,以车辆百公里油耗以及最长行驶里程为优化目标,提出了交叉和变异概率可动态变化的自适应遗传算法,对能量管理策略进行优化,使等效燃油消耗减少10%;闵海涛等[26]围绕增程式电动汽车结构和特点,针对传统增程式电动汽车主要围绕发动机工作区域及其控制效果进行研究,无法确定所制定的策略能否在全域范围内能达到最佳性能的缺点,以系统循环损失能量最小为优化目标,设计了带精英策略的非支配遗传基因算法的优化方法,使循环损失能量比优化前降低了6.63%;牛继高等[27]引入基于规则的发动机定点和最优曲线控制策略改善了燃油经济性,燃油经济性提高了9.8%;吴晓刚等[28]为了探讨能量管理策略对增程式电动汽车燃油经济性提升的潜力,考虑不同输出功率下燃油经济型最优并以最小燃油消耗为目标函数,提出了一种基于凸优化的能量管理策略,通过于传统的电量消耗—电量保持模式、混合模式进行了对比,增程器的平均效率提高了0.98%,系统驱动能效提高了3.66%。
图2 模糊控制器结构图

图3 动态规划算法求解示意图

图4 BP神经网络结构

图5 遗传算法的优化流程
2 增程式电动拖拉机研究
2.1 动力系统设计与参数优化
动力系统设计与参数优化是开展增程式电动机拖拉机研究的重要方面之一,目前,国内外开展了一些研究,主要以国内为主。刘孟楠等[29]以国内某一常用拖拉机为研究对象,设计了电动拖拉机驱动系统参数以及结构方案,并基于CRUISE建立了增程式电动拖拉机仿真平台,以旋耕为例,提出并建立了一种等效模型,仿真结果良好;Chen等[30]采用了双电机驱动方案,提出一种基于双电机耦合驱动方式的电动拖拉机传动系统参数匹配与设计方法,采用基于混合罚函数的粒子群优化算法进行了参数优化,建立了仿真动态模型,通过试验验证,提高了电动拖拉机牵引性能。国外各大高校和科研机构也有对混合动力电动拖拉机、增程式电动拖拉机的驱动系统开展研究,Kim等[31]对增程式混合动力拖拉机驱动系统进行研究,基于传统拖拉机道路测试获得的负载工况,分析了动力源的功率特性,并设计了两级减速比,用于典型农业作业;Kim等[32]针对并联式混合动力拖拉机在主要田间作业(如打包、犁耕和旋耕)的动态特性,提出了一种自适应观测器用于负载扭矩估计,并将估计的负载扭矩值与测量值进行比较以验证其性能。
2.2 转矩分配与能量管理控制策略
完成动力系统设计之后,如何进行转矩分配以及能量控制策略的研究是增程式电动拖拉机技术的关键,该方面国内外也有学者做了一些研究。Liu等[33]提出了一种基于负载转矩的控制策略,采用了粒子群优化算法,用来提升电动拖拉机能量转化效率;王丽绵等[34]从降低启动能耗角度出发,对增程式电动拖拉机的控制策略进行了研究,提出了电动机功率前向预测控制模型,从发动机起动控制略优化角度对增程器能耗、起动成功率、起动平顺性等进行了试验研究和分析,确定了最佳拖动转速以及起动控制方法,降低了起动能耗,其发动机起动控制逻辑如图6所示;Xu等[35]针对增程式电动拖拉机行程结束时动力电池SOC仍较高,电量并未得到充分利用的情况,对动力电池电耗与柴油车油耗能量管理策略之间控制参数调整的问题进行了研究,建立了拖拉机整车模型,利用AVL巡航控制模块编制能量管理策略,同时,为验证模型优越性, 同柴油机启停控制加定点能量管理策略(FPEMS)进行对比,通过连续操作和深松操作验证了该策略适用性。国外的研究很少,主要在韩国以及欧洲,比如Choi等[36]还提出了基于规则的扭矩辅助分配策略用于并联式混合动力拖拉机,通过仿真模拟比较了传统拖拉机和混合动力拖拉机燃料消耗,结果表明,并联式混合动力要比传统式省油量为0.514 3 L/h;赵静慧等以国内某款大功率拖拉机为例,采用了增程设计方案提出了驱动系统主要参数设计方案,并实施发动机启停 + 定点能量管理策略,对经济性和动力性进行了仿真分析,最后与传统拖拉机相比,降低了综合油耗的同时一定程度上提高了最大牵引力和最大爬坡度,其增程式电动拖拉机的驱动系统方案如图7所示;徐立友等[37]针对增程式四驱电动拖拉机前后轮转矩分配问题(四驱拖拉机控制原理如图8所示),提出了一种基于模糊控制的转矩分配策略,将犁耕阻力与拖拉机坡度作为模糊输入变量,将电机转矩分配因数作为输出变量,设计模糊控制器,并与定比分配策略进行了对比,有效控制滑转率在合理范围,效果良好。

图6 发动机起动控制逻辑

图7 增程式电动拖拉机驱动系统方案

图8 四驱拖拉机控制原理
国外对于增程式电动拖拉机转矩分配以及控制策略的研究极少,主要集中在韩国以及欧洲的高校及科研机构。Lee等[38]针对并联混合动力拖拉机提出了基于功率分配比规则的能量管理策略,该策略以效率最优为目标,仿真结果表明,优化后的燃油效率要比优化前的提高了1.88%;Mocera等[39]根据果园实际作业场景对并联式混合动力拖拉机进行了性能研究,提出了一种负载观察的能量管理策略,合理地分配两个动力源的功率需求,仿真结果表明,所提出的方案不仅能够在不同的工作条件下提供与传统拖拉机相同的功率,而且还可以使用更小的发动机达到同样的效果;Jia等[40]提出了一种用于串联式混合动力拖拉机的前向模型,设计恒温器(TC)和功率跟随器控制(PFC)这两种基于规则的能量管理策略,基于典型犁耕和收获混合工作循环工况下对其进行仿真分析,结果表明,PFC在节省燃料和减少氮氧化物(NOX)和一氧化碳(CO)排放方面实现了更好的性能,但以产生更多的颗粒物(PM)为代价。
2.3 不同增程式电动拖拉机关键技术对比分析
对于增程式电动拖拉机来说,最关键的技术在于能量管理及控制策略,根据控制器的数学建模原理,能量管理策略可以分为两大类:基于规则的能量管理策略和基于优化的能量管理策略[41-43]。增程式电动拖拉机也存在上述两者控制策略。在基于确定性规则的策略中,规则是在基于增程式电动拖拉机系统的功率流分析、效率/燃料或排放图和人类经验的启发式方法下来设计确定性规则的,规则的实现通常通过预先计算的查找表来实现功率分配问题,比如基于模糊规则、自适应规则等。由于其低计算需求、对在线应用的自然适应性、良好的可靠性和令人满意的油耗结果,基于规则的控制策略被广泛使用,然而,它们规则定义和校准过程漫长,并且会因每种拓扑结构和新的驾驶条件而重新定义规则,从而对基于规则的增程式电动拖拉机控制策略的鲁棒性提出了一些问题[44],这激发了优化算法的研究和适用性。
基于优化的能量管理策略在增程式电动拖拉机中的应用很少。基于优化的控制策略通过最小化目标函数随时间的和(全局优化)或瞬间最小化目标函数(局部优化)来决定控制信号。全局最优控制策略仅依赖于整个驾驶周期的先验知识,对于汽车来说,在现实中难以事先知道整个驾驶周期,因此,不能在实时中应用,但可以用来评估其他控制策略的质量,或基于此基础上设计在线实施规则。而在农作业场景中,对于增程电动拖拉机来说,一旦确定作业工况,其场景要比汽车驾驶单一的多得多,在此情况下,全局最优控制策略不失为一个不错的选择,线性规划[45-46]、动态规划和随机动态规划[47-49]、遗传算法[50-51]等都属于全局优化控制策略。局部优化控制策略是一种基于瞬时成本函数最小值的实时优化控制策略,所定义的瞬时函数只能依赖于当前的系统变量。瞬时成本函数应包括等效燃料消耗,还可以将排放污染物、电池寿命、驾驶平顺性等添加到瞬时成本函数中。虽然这类问题的解不是全局最优解,但可以实现实时在线优化。这些主要基于等效消耗最小化策略(ECMS)[52-53]、神经网络控制[54-55]或模型预测控制(MPC)策略[56-57]。
因此,结合上述对比分析,针对增程式电动旋耕拖拉机能量管理问题,进行数学一般公式化定义,结合拖拉机作业工况特征,实施全局优化控制是较好的选择。
3 增程式电动拖拉机存在的问题及发展建议
3.1 存在问题
1) 动力系统建模及参数优化针对性欠缺。增程式电动拖拉机在动力系统设计及建模时一般需要考虑整体的动力需求,在满足整体需求的基础上进行参数的匹配与优化设计。大多数的研究仅仅采用是通用的参照增程汽车的动力建模模式,并没有考虑到针对电动拖拉机各种作业工况下的实际动力需求,针对性不够。
2) 能量管理技术有待进一步改进和提升。能量管理技术是衡量增程式电动拖拉机总体性能的重要指标之一。对于电动拖拉机来说,如何在差异化以及不同负载、路况等条件下,综合考虑多个动力部件的动态响应特性与高效区间差异性,合理分配输出功率是关键。而现有的能量管理技术绝大部分采用基于确定规则的能量管理策略,不能实时根据工况变化动态调整策略,整体效率不高。
3) 整体续航里程较短,无法满足大载荷长时间作业。由于电池技术不够完善,增程式电动拖拉机仍存在续航里程较短的问题,无法满足大载荷长时间作业,尤其对于大功率拖拉来说,由于农作业时长需求和作业负载繁重,混合电驱动(增程)形式仍然是首选考虑方案,急需改进并提升电池性能。
4) 智能化技术运用不够。现有的增程电动拖拉机在传感、信息、网络、通讯等方面并没有很好结合进来,缺少大数据基础上的系统分析,影响了增程式电动拖拉机带极具作业时的精度与准确性。
3.2 发展建议
对于增程式电动拖拉机来说,未来机械结构的改进不是重点,结构方面相对比较成熟,重点在于控制策略与能量管理方面的研究。通过梳理目前增程式电动汽车以及电动拖拉机在动力系统设计、能量管理、控制策略等方面的研究现状与进展,结合增程式电动拖拉机的自身特点,借鉴增程式电动汽车在动力系统参数设计、能量管理及控制策略等方面的成功运用案例,提出以下几点研究建议。
1) 研究增程式电动拖拉机动力系统建模以及参数优化技术。目前,针对增程式电动拖拉机的建模均是在传统拖拉机等效模型基础上附加增程装置,同时在参数设计以及优化方面并没有考虑到拖拉机的诸如运输、犁土、翻土、整地等不同的作业需要,未来可以在基于一定数据分析基础上,全面考虑实际作业需求,实施个性化、精准化建模与参数设计,提高准确性。
2) 研究增程式电动拖拉机能量管理技术。整车能量管理的核心问题在于:在特定负载和路况条件下,如何综合考虑各部件动态响应特性与高效率区间差异性,对增程式电动拖拉机来说,即如何合理分配发动机与动力电池的输出功率,提升系统效率、节约燃油、提高电能利用率,如何在电耗和油耗间找到平衡点,提高特定工况下的续航里程。由于拖拉机工况相对汽车来说比较复杂,基于确定性规则的控制方法不一定适合电动拖拉机,而基于全局优化控制(比如动态规划算法等)在电动汽车上的成功运用,未来可以结合到增程式电动拖拉机能量管理研究中。
3) 开展适应增程电动拖拉机的电池及相关技术研发,提升续航里程。在充分分析增程式电动拖拉机作业特性与能量需求的基础上,开展适合该类拖拉机的电池及控制系统研发,在电池材料的选择、电池控制策略优化等方面进行针对性研究,重点提升大功率增程式电动拖拉机续航里程。
4) 开展智能化技术在增程式电动拖拉机上的运用。随着人工智能、大数据等技术的进步,已进入智慧农业时代,同时,基于模糊控制、神经网络等技术已经在电动汽车以及拖拉机上取得了一定的应用,但网络层级、结构仍较为简单。未来,通过在获取大量的数据样本前提下,可以进一步丰富神经网络结构,甚至引入深度学习控制算法,对增程式电动拖拉机的控制模型进行深入训练,提高控制精确性。
4 结语
能量管理以及控制策略优化是未来增程式电动拖拉机得以发展的重要前提。基于目前增程式电动汽车以及拖拉机在控制策略、动力参数设计、能量管理等方面的研究现状,提出完善增程式电动拖拉机的动力系统参数化设计与优化、实施全局优化控制、充分结合深度学习等人工智能算法是未来增程式电动拖拉机发展的关键。今后,随着控制技术和智能算法的进一步发展,实现控制的精准化和智能化,进一步提升全局范围内的电能利用率,降低燃油消耗,是未来增程式电动拖拉机技术的发展趋势。