基于U模型的模糊免疫自抗扰控制方法研究
2022-10-27韩明秀王海红
韩明秀,王海红
(青岛科技大学 信息科学技术学院, 山东 青岛 266061)
0 引言
非线性系统控制是自然界和工程领域中最为一般的控制问题,非线性系统往往具有复杂的特性,很难建立精确数学模型。为获得良好的控制效果,提出了分段线性化法、点线性化法和反推法等方法,虽然这些方法可以解决部分非线性问题,但在对非线性对象进行线性化的过程中,会出现缺失项等问题。根据非线性模型的结构特点,NARMAX[1]、Hammerstein[2]等近似模型被应用在非线性系统控制中,这些模型可以很好地描述非线性系统的结构,但随着阶数增加,参数变多,从而模型结构辨识困难,控制系统计算复杂[3]。
U模型是朱全民教授提出的一种非线性系统近似模型设计方法[4]。该方法通过设计控制器所得的系统伪输入来构造非线性方程,用牛顿迭代法求解方程得到非线性系统的真实输入[5],从而完成控制系统设计。U模型在非线性控制系统设计中的如下特点使其得以广泛应用:
1)在方法上,通过U模型方法,应用在线性系统的方法可以直接应用于非线性控制系统设计,这显著降低了设计复杂度并有效地提供了直接的计算算法。
2)在设计中,它首先获得期望的受控对象输出,然后在方程根求解中从U模型中计算出控制器输出。
3)对于非线性控制系统设计,它在更通用和更有效的框架内提供了新的见解和解决方案。
自U模型提出以来,基于U模型的控制系统设计方法被广泛研究,包括基于U模型的极点配置方法[6],将线性极点配置方法通过U模型设计方法应用到非线性控制系统设计中,使得非线性模型的动态行为可以通过零极点位置进行确定;U模型神经网络方法[7-8],利用U模型时变参数辨识的信息构建神经网络控制器,对数据易得的非线性系统进行控制;U模型自适应控制方法[9-11],用于控制一类未知参数的随机非线性离散时间对象,将未知系统基于U模型框架对U模型表达式中的时变系数进行辨识,并按极点配置的方法设计极点配置控制器,实时更新参数进行控制器参数的适应性修正实现自适应控制。U模型方法将非线性对象转化为关于控制输入的多项式形式,从而将线性系统的控制方法应用在解决非线性系统控制问题中,可以有效提高处理非线性系统的能力并简化非线性控制系统设计过程[12]。
实际控制过程中,扰动、噪声等不确定性因素不可避免,这些不确定性影响实际工程系统设计过程,因此,这也成为控制设计需要考虑的关键问题。针对这一问题,众多学者提出了许多相关的解决方案[13-14],其中,自抗扰控制(ADRC,active disturbance rejection control)方法将系统所有未知因素归结为总扰动,设计有两个独立的控制回路:满足所需跟踪性能的非线性状态反馈(NLSEF, nonlinear state error feedback)控制器和估计系统干扰和不确定性的扩张状态观测器(ESO, extended state observer),能够解决系统在未知扰动存在下的跟踪控制问题[15],便于控制设计。
U模型作为非线性控制系统设计中一种有效近似模型设计方法,被应用在ADRC中,用U模型描述ADRC方法的受控对象,设计基于U模型的自抗扰(UADRC, U model based active disturbance rejection control)控制系统,通过设计包含被控对象逆模型的控制律,将受控对象转换为一个单元,最小化系统输入输出之间的滞后,简化了非线性系统ADRC方法的设计过程。在UADRC方法中如果ESO运行良好,受控对象也可以动态转换为一个单元,并且可以减少稳定高阶积分器的难度。相反,如果ESO性能不完美,则需要更强大的控制器来减少不准确的总干扰估计和不完美的变换或近似的影响,那么也可以获得更好的性能。除此之外,在基于U模型的ADRC设计过程中,控制器通常不能兼顾跟踪误差和系统响应速度[16],因此,为解决上述问题,在ESO设计环节,基于U模型方法所描述系统进行扰动观测设计。在NLSEF环节,引入模糊免疫(FI, fuzzy immune)控制机制,将免疫机理与模糊算法相结合,设计基于U模型的模糊免疫自抗扰控制(FI-UADRC,fuzzy immune active disturbance rejection control based on U model)系统,通过抑制机理和反馈机理实现非线性智能反馈,解决稳定性和快速性之间的矛盾[17]。
综上所述,本文基于UADRC的抗扰性能和FI的自适应性,给出一种FI-UADRC控制系统设计方法,将实现过程安排如下:
1)将非线性多项式模型转换为U模型表达式(不是线性近似),以降低计算难度。
2)利用系统控制输入与受控对象U模型输出来构建扩张状态观测器估计扰动,进行补偿控制。
3)在非线性反馈环节设计中引入模糊免疫机制,在跟踪控制过程中对扰动进行抑制的同时实现参数自整定。
4)最后通过仿真实验验证FI-UADRC方法的有效性和优越性。
本文的其余部分分为以下几节。
在第1节中,给出了U模型定义并对U模型方法进行非线性模型转换的过程进行详细描述。在第2节中,逐步实现了基于 U模型的模糊免疫控制系统设计过程,包括扩张状态观测器设计和模糊免疫控制器设计,在第3节中,对第2节相关参数设置进行分析,并对基于U模型的模糊免疫自抗扰控制系统设计方法实现步骤进行概括,为应用提供保障。在第4节中,引入相关引理进行一系列证明,证明所提出方法的理论可行性。在第5节中,选择已知系统的Hammerstein模型、CSTR动态过程进行仿真实验,以展示U模型框架内模糊免疫自抗扰控制方法的可行性。在第6节中,分析实验结果对研究方法进行总结。
1 非线性系统模型转换
FI-UADRC控制系统包括非线性系统U模型和基于U模型的控制器。本章介绍U模型的实现。
对于SISO(单输入-单输出)非线性系统,基于U模型的控制原理如图1所示。

图1 U模型控制原理图

f(t)(RM+1→R)为系统扰动项,满足Lipschitz条件且|f(t)|≤ξ,ξ∈N,基于U模型的非线性系统描述为:
(1)
其中:y(t)∈R和u(t-1)∈R为在离散时刻t∈(1,2,…)系统的输出、输入信号;j代表系统阶数,M代表u(t-1)的最高阶,参数αj(t)∈RM+1为过去时刻输入和输出的函数(u(t-2),…,u(t-n),y(t-1),…y(t-n))。
U(t)为通过设计Gc所得的系统的伪输入,是包含了非线性系统真实输入的非线性方程,可以通过求解U(t)=y(t)获得,通常采用牛顿迭代算法,算法描述如下:
uk + 1(t-1)=uk(t-1)-
(2)
其中:k是迭代的次数,k>0,uk+1(t)是从uk(t)迭代获得的。可以看出,在非线性系统U模型的转换过程中,系统控制输入取自牛顿迭代公式的解,基于U模型的控制系统设计不要求在设计中对非线性对象模型进行线性化,只是使用线性设计方法直接设计基于非线性对象U模型的控制系统[18],因此,非线性系统U模型的变换不会丢失原被控对象的任何信息,保证了模型的高精度。

综上所述,U 模型与牛顿迭代公式越匹配,控制效果越好,当转换后的系统模型完美匹配时,Gu=1,系统输出可以赶上系统输入。在实际控制系统设计过程中,完美匹配是很难做到的,主要原因是:迭代算法的度数是有限的,模型不能完全匹配。因此需要设计控制器进行控制。
设计控制器时,可以先用线性控制方法设计U(t),然后用牛顿迭代算法求解,最后输入到实际对象中得到实际输出,下面将基于U模型设计方法展开Gc的实现过程。
2 FI-UADRC控制系统设计
基于U模型的模糊免疫自抗扰控制器的设计过程主要分为两部分:ESO环节和NLSEF环节。
本章将基于系统,在ESO环节观测扰动f(t),实现扰动抑制补偿控制;用FI控制方法设计NLSEF环节得到U(t),经反馈补偿获得U1(t),通过式求解U1(t)=y(t)获得控制率跟踪期望输出r(t),实现如下控制目标:
e(t)→0
(3)
且|e(∞)|≤ζ,ζ∈N。详细实现如下所述。
2.1 ESO(扩张状态观测器)设计
扰动因素在非线性系统控制过程中不可避免,为实现控制目标,针对抵抗扰动这一控制需求,设计有ESO环节对总扰动进行估计补偿,从而保证控制系统对未知干扰具有足够的鲁棒性[19]。
针对系统中扰动项f(t),设计系统伪输入U1(t),使得:
(4)
基于U模型的自抗扰控制思想中,受扰动影响的系统输出y可以描述为:
(5)
采用如下所示的ESO环节对扰动进行观测[20]:

(6)
其中:z1,z2为ESO观测输出,分别描述系统输出y和总扰动f的观测量,ε1为系统输出的观测误差,β1,β2为ESO的可调参数,和仿真步长h有关[20]。为消除影响,将U1设计为:
U1=U-z2
(7)
将式(7)代入式(3)则有:
(8)
扰动补偿过程如图2所示。

图2 扰动补偿过程示意图
综上所述,理想情况下当ε=0时,f对系统的影响能够通过式(6)进行完全补偿。ε=f-z2为扰动观测误差,同样,当ε1=0时系统误差通过期望输出r(t)和系统输出的观测值z1描述如下所示:
e(t)=r(t)-z1
(9)
在自抗扰方法的实际应用过程中法发现,ε1,ε可以通过选择合适的观测器带宽w0来尽可能减小,规避因ESO设计不当对控制效果产生的不良影响[21]。
2.2 FI控制器设计
在基于U模型的自抗扰方法中,非线性反馈控制环节参数整定过程自适应性较差,不能兼顾动态性能和静态性能、期望值跟踪和扰动抑制之间的协调关系[16],为此引入模糊免疫机制[17]。免疫控制是利用免疫系统对抗原的适应性调节功能,达到良好的控制效果。因此,控制系统具有很强的鲁棒性。
免疫系统对于入侵抗原的响应迅速而稳定。一方面抗体要快速消除外来入侵,另一方面抗体浓度不能太高,所以必须控制抗体浓度。免疫系统可以产生抗体来抵抗入侵的抗原,抗体是问题的关键。生物的免疫系统由淋巴细胞和抗体分子组成,淋巴细胞主要由T细胞和B细胞组成,T细胞分为TH(辅助细胞)和TS(抑制细胞)。当抗原进入体内并被周围细胞消化后,T细胞会收到信息然后刺激B细胞产生抗体来消除抗原。抗原增多,TH细胞增多,TS细胞减少,从而产生较多的B细胞。相反,TH细胞变少,TS细胞增多,B细胞减少。很快,免疫反馈系统在抑制机理和反馈机理的共同作用下会趋于平衡[22]。第j代的抗原数量可以等效于控制系统第t个采样时刻的给定值与输出值的偏差e(t),第j代抗原刺激产生的TH细胞数量为TH(j),TS细胞对B细胞的抑制作用为TS(j),则第j代B细胞所受刺激为:
S(j)=TH(j)-TS(j)
(10)
其中:TH(j)=k1e(t),TS(j)=k2g(Δs(j))e(t),第j代B细胞浓度S(j)相当于第t个采样时刻的模糊免疫控制器输出U(t),则有:
U(t)=(k1-k2g(U(t),ΔU(t))e(t)=
K(1-ρg(U(t),ΔU(t))e(t)
(11)

设参数K(1-ρg(U(t),ΔU(t))=K*,通过一般系统阶跃响应特性对参数变化进行分析:在系统响应上升到达稳态值之前,为了加快系统的响应速度,参数K*的初始值应该比较大。同时,为尽量避免超调,当误差值e(t)逐渐减小时,参数K*也应随之减小。在响应从稳态值上升到达峰值之前的阶段,为了增加控制器的抑制作用,减小系统的超调量,应逐渐减小参数K*。从峰值回落到稳态值的阶段,为了使系统的实际输出快速回到期望点,避免大惯量,应逐渐减小参数K*。在从峰值回落到期望值的惯性调节阶段,为了减小误差e(t),参数K*应该增加,这与响应从稳态值上升到达峰值之前的阶段相同。综上所述,K*随误差e(t)的变化规律为:当e(t)→±∞时,K*取最大值。e(t)=0时,K*取最小值;K影响K*的变化区间,K*的变化率可以通过改变ρ来调整。
由以上分析可以看出,免疫机制将控制目标转化为参数K,ρ的调节,K影响系统响应速度,间接影响稳态误差,ρ影响系统的稳定度。由此可以看出,模糊免疫控制的优势是可以通过调整参数K,ρ来解决响应速度和超调之间的冲突,牺牲了系统复杂度,但提升了控制器自适应能力[23]。
3 FI-UADRC参数设置
基于上述分析,为实现扰动抑制和跟踪控制两个控制目标,将模糊免疫与基于U模型的自抗扰控制方法相结合,采用U模型的控制方法对非线性系统进行处理所得的FI-UADRC控制系统框架如图3所示。
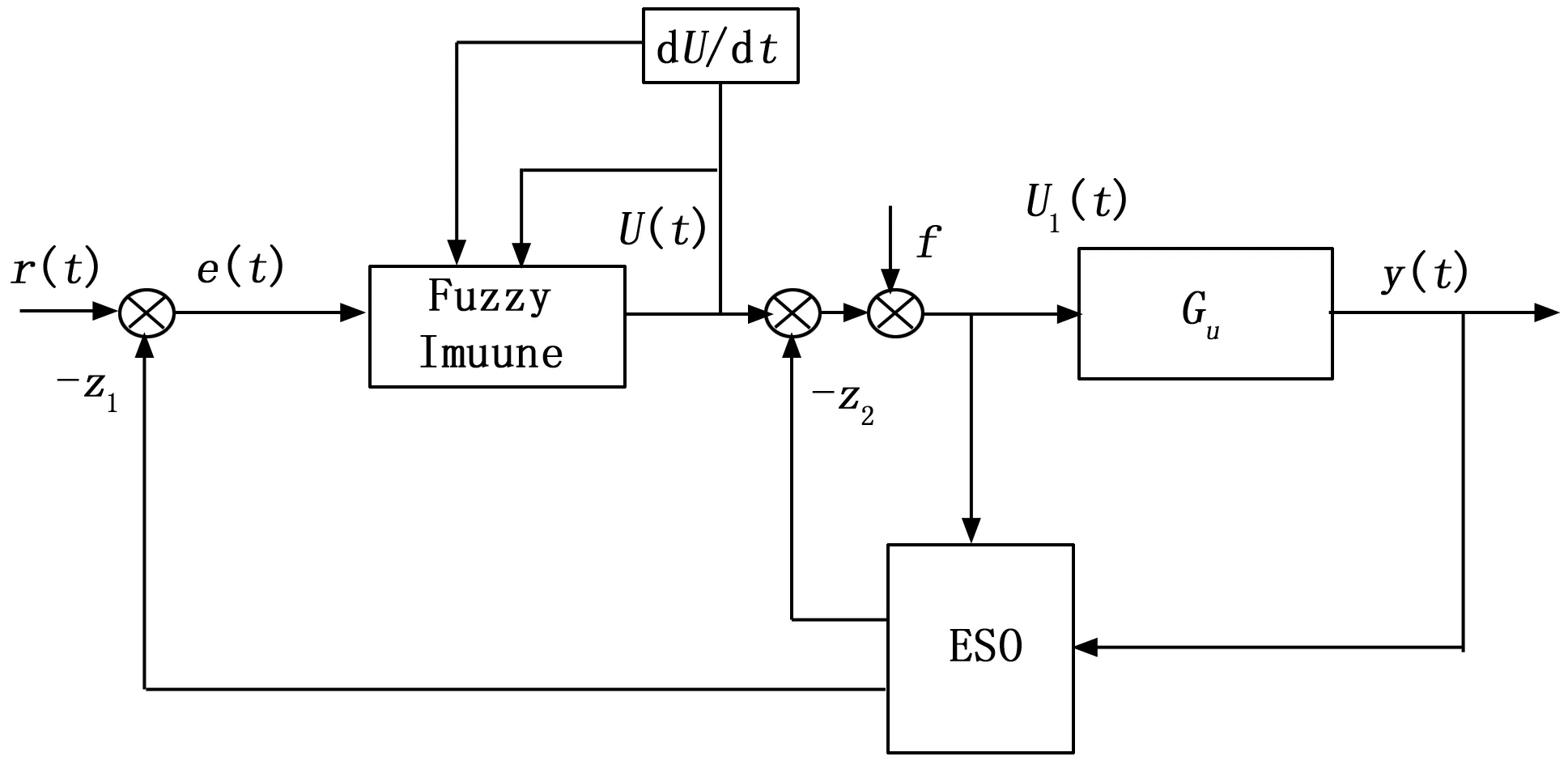
图3 FI-UADRC控制系统框架图
基于U模型的模糊免疫自抗扰控制系统控制方程有:
(j=1,2,…,n-1)
(12)
系统可调节参数有模糊免疫控制环节的K,ρ,g(*)和ESO环节的β1,β2。有仿真研究表明β1,β2分别和仿真步长h以及1/5h2成反比[24]。利用模糊规则可以逼近任意非线性函数,本文设计一个二维的模糊调节器来逼近非线性函数g(*),U(t),ΔU(t)的取值范围[25]可得:

(13)
设计U(t),ΔU(t)={1,-1},模糊子集为“正”(P)和“负”(N),则模糊比例因子[25]为:
设计g(*)的模糊集域为{1,0,-1},模糊集为“正”(P),“零”(Z)和“负”(N)。模糊推理采用Zadeh的模糊逻辑AND操作,并采用常用的mom反模糊化方法得到g(*)[26],则有:
-1≤g(*)≤1,K>0,ρ>0
(14)
根据模糊语言规则,当U(t)和ΔU(t)正向增加时,为了减小超调,应使g(*)减小从而增大K*。当U(t)和ΔU(t)都处在中间值时,为了防止偏差ΔU(t)急剧变化,加快系统响应,应使g(*)增大从而减小K*。当偏差ΔU(t)减小时,应适当增大g(*),保持系统稳定。综上,模糊规则设置如下:
采用三角形隶属度函数且所有隶属度函数都定义在整个(-∞,+∞)区间,如图4~5所示。

图4 U(t),ΔU(t)隶属度函数

图5 g(*)隶属度函数
综上所述,FI-UADRC控制系统实现过程为:
Step1:根据第4节中所给方法选择g(*)模糊集,定义图4、5输入输出隶属度函数,建立表1所示的模糊控制表,根据模糊规则进行模糊推理得出g(*);

表1 g(*)模糊规则表
Step2:将Step1所得g(*)代入式(11)求得控制器输出U(t),同式(6)代入式(7),求得扰动补偿后的控制器输出U1(t);
Step3:由式(6)所得z1,z2作为扩张观测反馈量,对扰动f进行补偿,实现式(4);
Step4:根据U(t),ΔU(t)按表3规则,修正式(2)参数g(*),更新U1(t);
Step5:将所得U1(t)代入式(4);
Step6:由牛顿迭代法求解式(4)得u(t-1)。
下面将基于以上设计思路,选用非线性系统模型做U模型转换,进行系统分析和仿真实验。
4 系统分析
从图2可以看出,当Gu=1时系统为线性,闭环系统输出取决于r(t),ε(t),ε1(t)。对于观测的系统输出误差ε1和总干扰误差ε有以下引理:
引理1:存在观测带宽w0,使得当f变化率有界时,ε1,ε在有限时间内是有界的[27]。估计误差的界限与观测带宽成反比。
引理2:对于一个工程系统来说,它的力量总是有限的,因此,可以合理地假设总扰动的变化率是有界的。
基于引理1、2及文献[16],|ε(t)|≤σ,|ε1(t)|≤σ,σ>0,从而ε(t),ε1(t)是图2所示闭环系统的有界输入信号。设ε(t)=σsinωt,ε1(t)=σsinω1t,r(t)=A·1(t)(A和1(t)分别表示信号幅度和单位阶跃信号),则有:
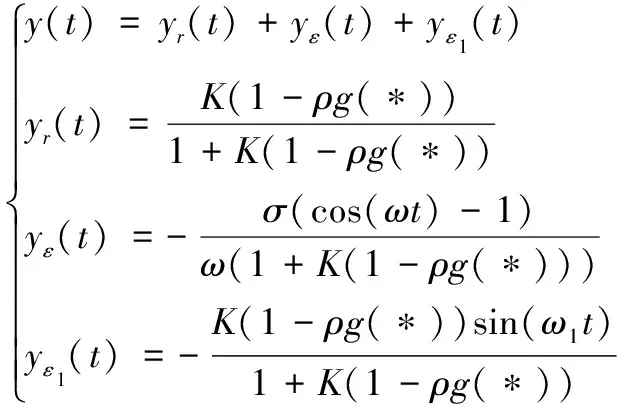
(15)
稳态跟踪误差为:
(16)
从而有:
(17)
由式(17)可以看出,稳态误差同观测误差成正比,同时,分别与ρ,K成正比和反比。为实现式控制目标,适当增大ρ可以减小系统超调量,通过提高ESO估计能力也可以减小误差,本文取w0=1/2h[28]来减小观测误差的影响。
5 仿真验证
为了验证FI-UADRC控制系统的有效性和优越性,做如下仿真实验进行说明。
仿真1:为验证U模型方法可以简化控制器设计中的计算过程,采用文献[6]中4.1所示Hammerstein模型进行仿真。

(18)
首先将式转换为U模型形式:
y(t)=α0(t)+α1(t)u(t-1)+
α2(t)u2(t-1)+α3(t)u3(t-1)
(19)
α0(t)=0.5y(t-1)+1+0.3x(t-2),α1(t)=1,α3(t)=0.2。
将式(12)与(19)联立,通过式(2)进行迭代可得非线性系统真实控制输入u(t-1)。
仿真步长为1,K=0.3,ρ=0.3。假设扰动项g(t)=0.1 sin(0.03πt),仿真结果如图6、7所示。
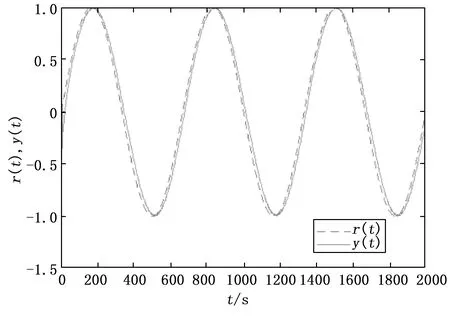
图6 系统输出y(t)与期望输出r(t)

图7 系统控制输入u(t-1)
由仿真1过程可以看出,U模型表达形式可以从已知模型转换而来,充分利用了基于模型的控制系统设计方法的已有研究成果。U模型方法所描述的系统是包含系统真实控制输入的多项式结构,基于这种多项式结构,采用牛顿迭代方法求解非线性数学方程就能求取系统控制输入,求解过程简单。且所得的控制输入平滑,系统输出能较好跟踪期望输出,保证了良好跟踪控制效果。
仿真2:为体现FI-UADRC控制方法的优越性,采用FI-UADRC,UADRC两种方法对CSTR动态过程进行仿真实验。其中y描述反应釜输出,u表示反应物流量,描述为反应釜控制输入。在控制器和被控系统之间加入零阶保持器,CSTR动态过程取采样周期Ts=0.05,采用U模型方法可以描述为[29]:
y(t)=0.8606y(t-1)-0.0401y2(t-1)+
0.0020y3(t-1)+[0.0464-0.045y(t-1)+
0.0034y2(t-1)]u(t-1)+
[-0.0012+0.0013y(t-1)]u2(t-1)
(20)
K=0.2,ρ=0.3,h=0.1,设扰动具有g(t)=5sin(0.5t)形式,UADRC参数设置同文献[16],控制效果对比如图8~9所示。

图8 CSTR系统输出y(t)和期望输出r(t)
从图8可以看出,FI-UADRC控制系统在持续扰动下仍能较好地跟踪期望输出轨迹,相较于UADRC,调节时间短,跟踪误差小,具体数据如表2所示。

表2 FI-UADRC与UADRC动态性能对比数据
如图9所示,两种方法的系统误差均收敛到0,但在期望值发生大的跳变时,两种方法的系统误差均出现一定波动,而基于U模型的模糊免疫自抗扰控制系统相对于改进前的U模型自抗扰方法对于系统本身的剧烈变化反应迅速,在较短时间内回复稳态值。由仿真2实验结果可以看出,基于免疫控制的自适应调节功能,基于U模型的模糊免疫自抗扰控制系统具有更强的鲁棒性。
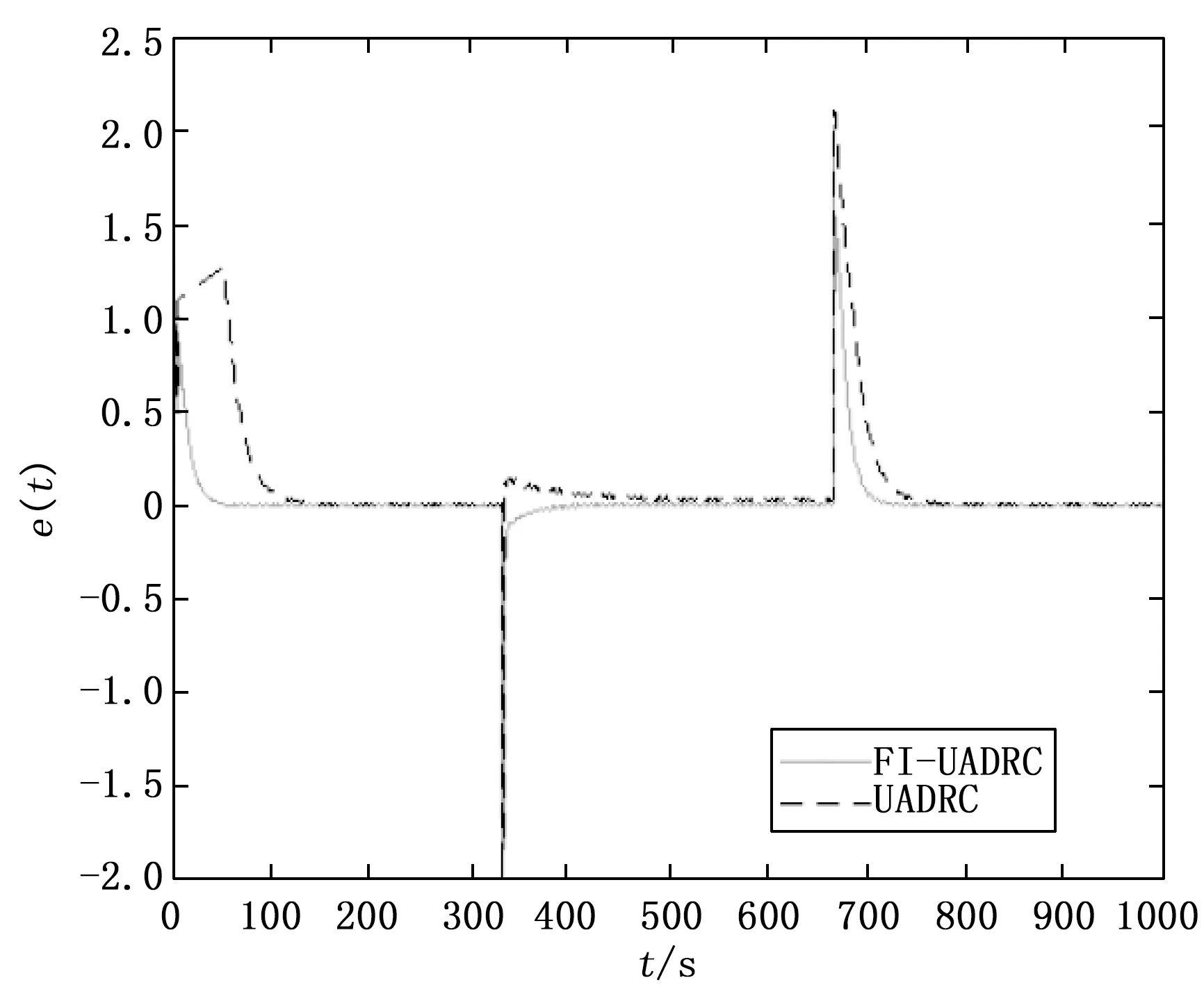
图9 FI-ADRC控制CSTR过程系统误差e(t)
综合上述仿真实验分析,基于U模型的模糊免疫自抗扰控制方法求取系统控制输入过程简单,并且能够较为准确的跟踪理想输出,且在扰动存在的情况下,能够有效抵抗扰动对非线性系统的不良影响,使控制输入较为平滑。
6 结束语
本文针对一类非线性系统扰动抑制问题,引入U模型方法进行被控对象建模,有效降低了非线性系统控制律求解的计算难度。结合模糊免疫控制算法和U模型自抗扰控制方法提出基于U模型的模糊免疫自抗扰控制系统设计方法,设计扩张状态观测器,对系统不确定性以及外部扰动进行观测补偿,实现扰动抑制,改进U模型自抗扰控制方法的非线性反馈环节,实现系统扰动下的精确跟踪控制。通过仿真对比验证,可以看出基于U模型的模糊免疫自抗扰控制方法抗扰性能优于U模型自抗扰控制方法,跟踪误差更小,反应速度更快,有效抑制扰动影响的同时实现了跟踪控制。
