PLC硬件结构的水电站故障监测系统及故障识别
2022-10-27汪广明黄赛枭
熊 玺,汪广明,童 松,何 滔,黄赛枭
(国能大渡河沙坪发电有限公司,四川 乐山 614300)
0 引言
21世纪以来,我国水利水电事业发展迅速,水电站单机容量不断增大。水电站的运行稳定性直接关系到电站的安全和电网的供电质量[1]。水轮机调节系统(HTGS, hydro-turbine governing system)在水电站中起着功率调节的作用,为了减少HTGS的突发事故,延长HTGS的使用寿命,许多大型水电站采用360摄像头、智能巡检机器人、无人机等方式对水电站中关键设备进行在线状态监测,分析水电站机组的稳定运行状态,并结合设备故障诊断技术,达到保证水电企业设备安全稳定运行的目的,从而提高水电企业的经济效益[2-3]。
针对上述问题,文献[4]提出了一种水电站故障智能检测系统,从运行数据中研究了故障特征向量,并利用人工神经网络建立了故障诊断模型,具有较好的故障诊断能力。然而该系统运算性能差,诊断时间太长。文献[5]公开了广义频率响应函数作为基于HTGS参数模型的诊断方法,非线性输出频率响应函数(NOFRFs,nonlinear output frequency response functions)在非线性系统分析中具有良好的计算性能,有助于HTGS的故障诊断。但NOFRFs模式的识别需要多种精度,在工程实践中难以实现。
1 总体方案设计
鉴于上述文献技术中的优缺点,本研究采用巡检机器人对水电站HTGS进行智能监测,机器人能够通过自身摄像头拍摄HTGS实时画面,作为本文中的采集图像数据,以巷道巡检机器人为例的采集识别图像如图1所示。

图1 巡检机器人采集识别图像案例
之后,得到的图像数据要根据可编程逻辑控制器(PLC, programmable logic controller)控制器进行智能识别,图像的识别过程为计算机算法运算处理过程。在此基础上,本研究还构建了计算机平台—水电站故障监测系统,其架构如图1所示。
图2中的系统框架可以看出,本研究通过设置不同的数据层次实现多种类型的数据诊断。首先,通过在水电站电力系统中设置巡检机器人行动路线,通过机器人上智能摄像头采集HTGS实时图像数据信息,提取HTGS图像中的故障特征。在数据传输过程中,通过无线传输的方式将HTGS中的故障数据传递到水电站故障监测系统,传输途径通过云平台传递到数据分析层进行数据分析或者计算,利用优化的DPM算法实现HTGS的故障识别。与此同时,通过映射的方式处理HTGS中的水电站故障监测系统数据类型的复杂非线性关系,通过巡检机器人视觉识别实现电网系统中HTGS的数据信息诊断和故障位置诊断,使用户能够实时地得出HTGS故障诊断方案[6]。诊断后的数据信息通过远程数据传输端口传递到数据监控层进行监控,进而实现底层数据的物联网传递,用户无需在现场即可实现底层数据的远程监控。
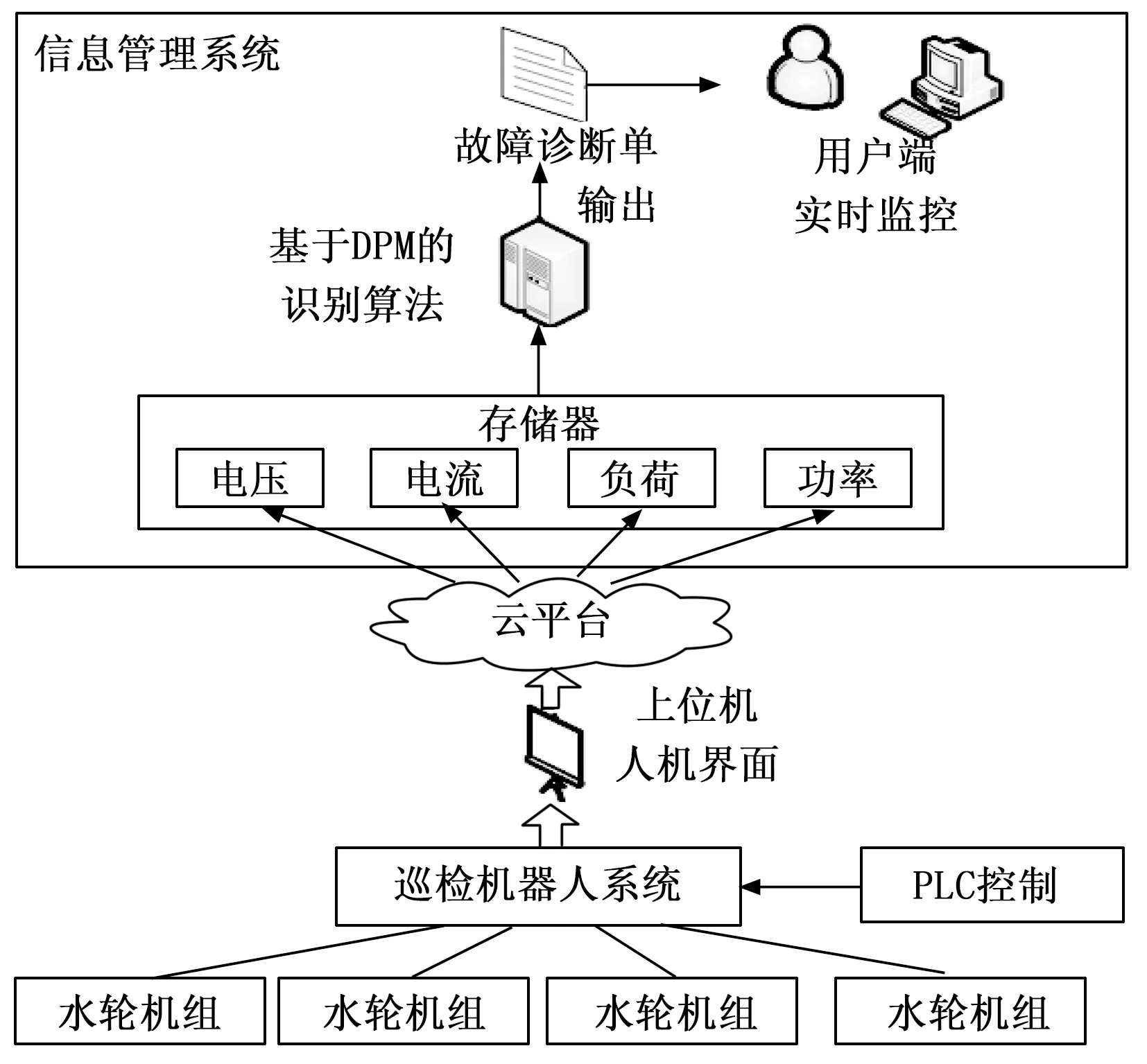
图2 水电站故障监测系统架构
2 关键技术
2.1 PLC硬件结构以及控制算法
本研究采用PLC控制巡检机器人的信息获取,该技术可以自动控制巡检机器人的行动路线以及故障定位,避免了人为故障诊断造成的错误现象。本研究采用日本厂家FX3U-64MR-ES-A型号的PLC控制器,与传统控制方式相比,该型号PLC 控制系统有三大优点:1)PLC的控制功能编程简单,程序语言很容易明白,方便操作;2)PLC具有很高的兼容性,能够与普通用户电脑直接相连;3)PLC具有远程通讯的技术,可以接收模拟信号[7-8]。有关PLC硬件结构如图3所示。
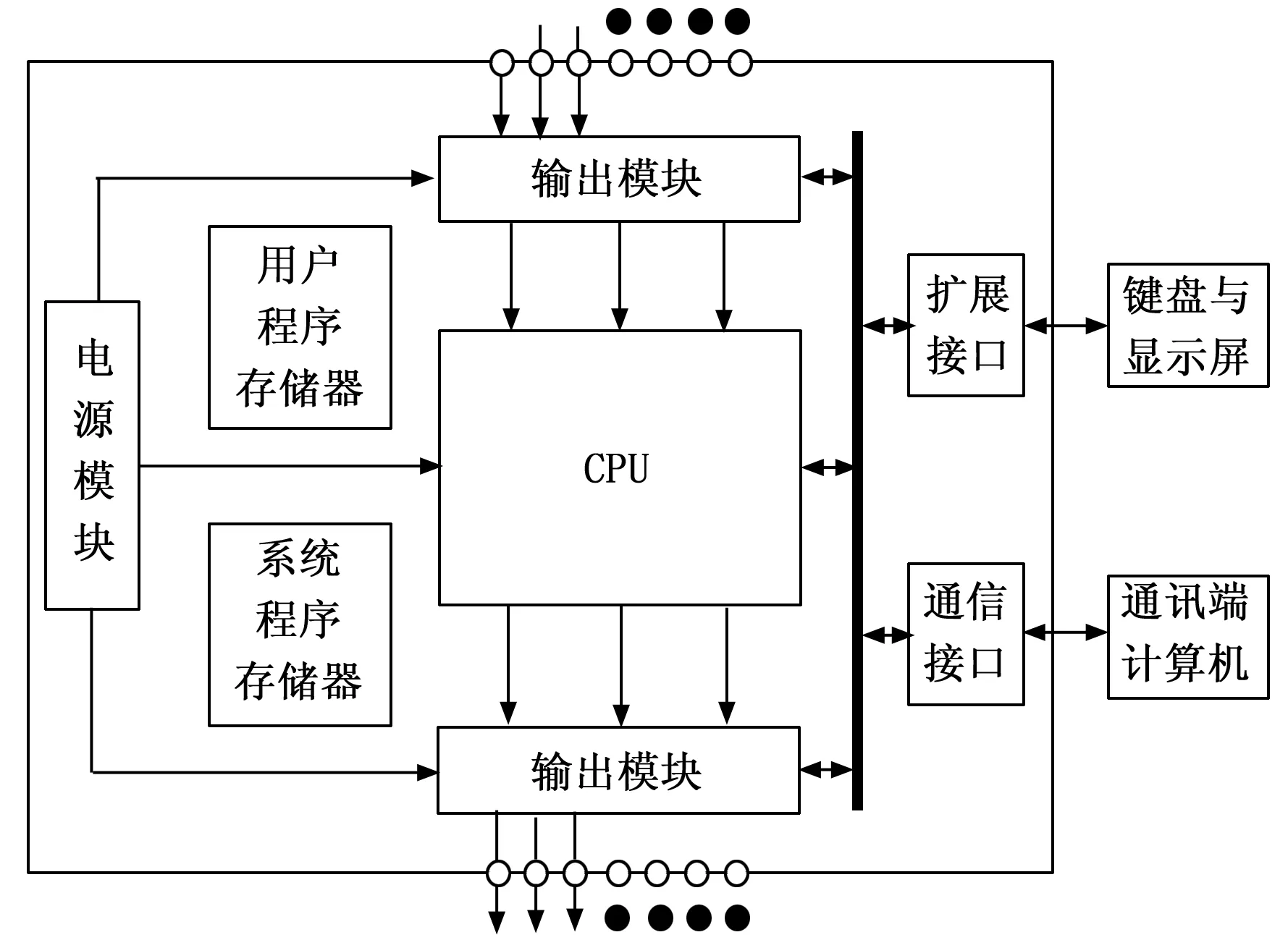
图3 PLC硬件结构框图
如图3所示,PLC结构拥有电源、中央处理单元(CPU,central processing unit)、存储器、存储器、输入模块、输出模块、通信接口、电源模块及扩展接口模块等。其中,电源部分在整个PLC结构框图中作用是十分重要的,能够提供系统运行的电压,保证PLC工作稳定运行;CPU对PLC整个结构进行控制指挥;存储器把所需要的硬件软件安全的存放,通常固化原厂系统代码在系统存储器中,用户无法对只读内存中的系统代码进行改写,软件代码的质量也决定了PLC的性能;输入/输出模块则是方便接收信号和反馈信号的通道;扩展接口模块PLC的扩展接口模块主要负责PLC与外围模块之间的连接,保证了控制器与外部的有效数据通讯[9]。
PLC的工作原理并不复杂。总结归为4个字:循环扫描。PLC的具体工作内容分为3个模块:输入采集、程序编程和输出刷新。在PLC运行的时候,扫描速度由程序员设定。PLC系统会对全部输入数据进行扫描,然后存储起来,在扫描过程中,一定要保证收到的信号在扫描的周期内,否则将无法保存起来。此外,CPU会根据输入/输出模块对其中所有HTGS故障数据进行输出刷新,然后通过输出端口连接到外面电路[10]。
由于PID控制算法稳定性差,本研究采用模糊控制算法,设水压理论值为P,水压实际测量值为P′,则误差x为:
x=P′-P
(1)
将误差x与误差变化率Δx作为模糊控制算法的输入,转化为模糊集,并构建建立输入变量与输出变量之间的模糊控制规则。模糊控制表是利用模糊元函数计算出来的,存储在PLC的存储器中。以本研究的供水系统为基础,将进水轮发电机组水压误差x、误差变化率Δx和输出变量v的模糊集设为QB(负大)、WA(负中)、RE(负小)、ZQ(零)、JK(正小)、HR(正中)、PL(正大),转换成数字域(-3,-2,-1,0,1,2,3)共有7个等级[11]。关于模糊集的模糊元函数在数字域中的分布如图4所示。
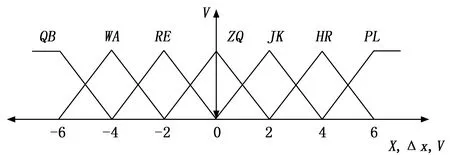
图4 模糊元函数分布图
通过模糊控制规则和根据模糊元函数得出模糊控制规则如表1所示。
如表1所示,可以得出模糊控制关系:如果x=A和Δx=B,则v=C。A、B、C分别代表模糊集合中任意一个元素。根据模糊控制规则表,对输入值进行模糊控制算法转换为数字域,得出相应的控制运算代码结果。
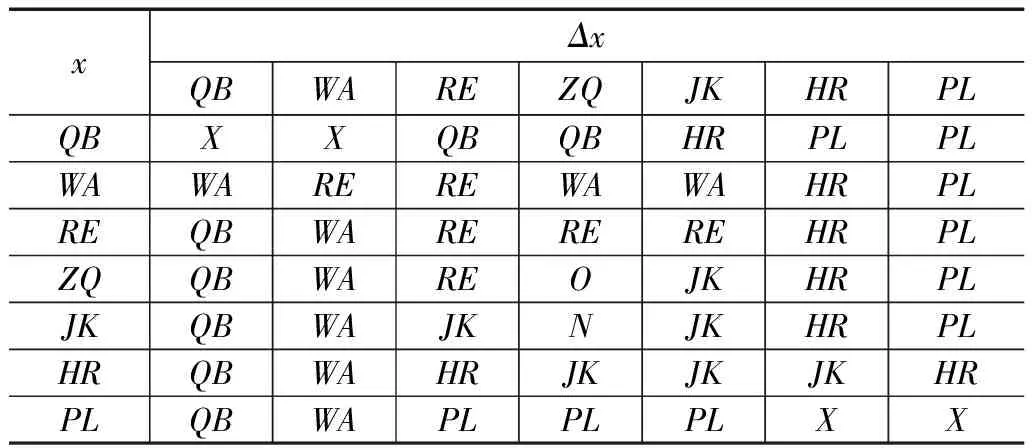
表1 模糊控制规则表
采用模糊控制算法能够分析内部参数动态稳定性,进一步分析HTGS故障问题。但并非每台水轮发电机组都有完整的特性曲线,因此,本研究构建简化非线性水轮机模型,该模型因结构简单、计算精度高而得到广泛应用。简化非线性水轮机模型可表示如下:

(2)
式(2)中,Pm是指水力机械功率,At是指比例系数,q是指水轮机流量,Qnl是指水轮机空载流量,D是指速度失调阻尼系数,G是指闸门开度,Tw是指水锤时间常数,fp为是指水头损失系数,h是指水头。考虑到HTGS中发电机的动态转速,发电机的模型可描述为以下传递函数:
(3)
式(3)中,x表示水轮发电机组的频率,TaS表示惯性时间常数,eg表示自适应控制系数。非线性水轮发电机组模型如图5所示。

图5 非线性水轮发电机组模型框图
NOFRFs是频率响应函数在非线性系统中的推广,它能反映非线性系统的一些典型频率响应。正常状态下的GFRFs与非线性系统中的故障状态不同,这种现象可用于故障诊断。n阶NOFRF如下所示:
(4)
式(4)中,Y和U分别是指HTGS输入和输出的频谱,σ是指HTGS的非线性函数自变量,Hn是指n阶广义频率响应函数。当HTGS系统发生故障时,系统的非线性特性会发生变化,其反映在NOFRFs上。因此,通过NOFRFs可以反应出水电站HTGS故障问题。
2.2 优化的DPM故障识别算法
为了解决水电站HTGS图像的故障识别困难的问题,本研究利用基于方向梯度直方图(HOG,histograms of oriented gradients)特征模板优化的可变形组件模型(DPM, deformable part model)算法算法实现HTGS的故障识别。HOG特征是巡检机器人视觉识别中最常用的特征模型,其提取方法的具体过程为:
步骤1:将HTGS图像转换为灰度图,并进行标准化:
(5)
式(5)中,T(a,b)是指HTGS图像的灰度值。
步骤2:梯度计算。计算HTGS图像在像素(a,b)点的梯度值,其公式为:
La(a,b)=H(a+1,b)-H(a-1,b)
Lb(a,b)=H(a,b+1)-H(a,b-1)
(6)
式(6)中,La(a,b)是指HTGS图像的水平梯度值,Lb(a,b)是指HTGS图像的垂直梯度值,H(a,b)是指HTGS图像的像素值。在像素点(a,b)的梯度向量为:
(7)
(8)
式(7)~(8)中,L(a,b)是指HTGS图像的梯度值,α(a,b)是指HTGS图像的梯度方向。
步骤3:构建方向梯度直方图。将HTGS图像分成若干模块,每个模块有8*8个像素,将模块梯度方向分成9块。对模块中的每个像素在梯度方向直方图中进行加权投影,就可以统计出该模块的梯度方向直方图[12]。将相邻的几个模块进行组合,并进行归一化。
步骤4:生成特征向量。每片归一化模块会有部分重叠的HOG特征,提取这些特征生成特征向量。关于HOG特征提取过程中单元格、块以及图像之间的关系如图6所示。
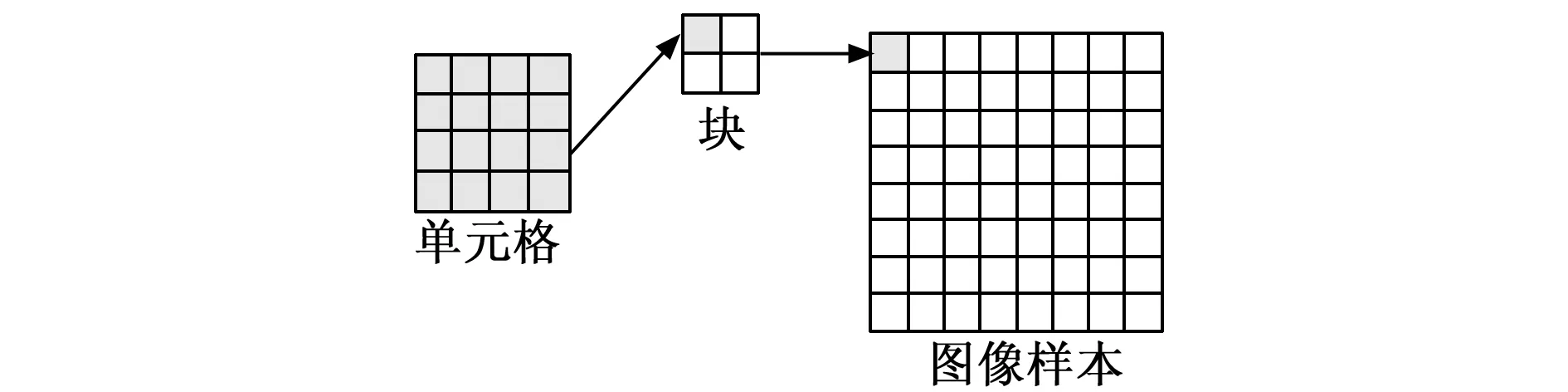
图6 HOG特征提取过程示意图
在得到HOG特征后,支持向量机(SVM, support vector machine,)可以最大限度地分离出HTGS图像两个类别特征。该分类器可以简化分类中的问题,并能剔除许多冗余信息。假设一个线性SVM分类器为f(x),该函数的定义表达式为:
(9)
式(9)中,R是指SVM分类器一个参数,x是指一个HTGS图像样本变量,z是指隐变量,Z(x)是指隐变量的取值空间,P(x,z)是指HTGS图像样本的描述。一个SVM分类器训练主要通过最小化目标函数得到最优参数R,具体定义为:
(10)
式(10)中,M(R)是指目标函数,i是指第i个训练任务。关于求出目标函数最小化,可以通过固定R为每个正样本选取最佳的隐变量值来最优化。
DPM基于HOG特征采用了模块化的概念,并在归一化处理时,直接将当前单元与周围4个单元的区域归一化。关于优化的DPM特征提取流程如图7所示。
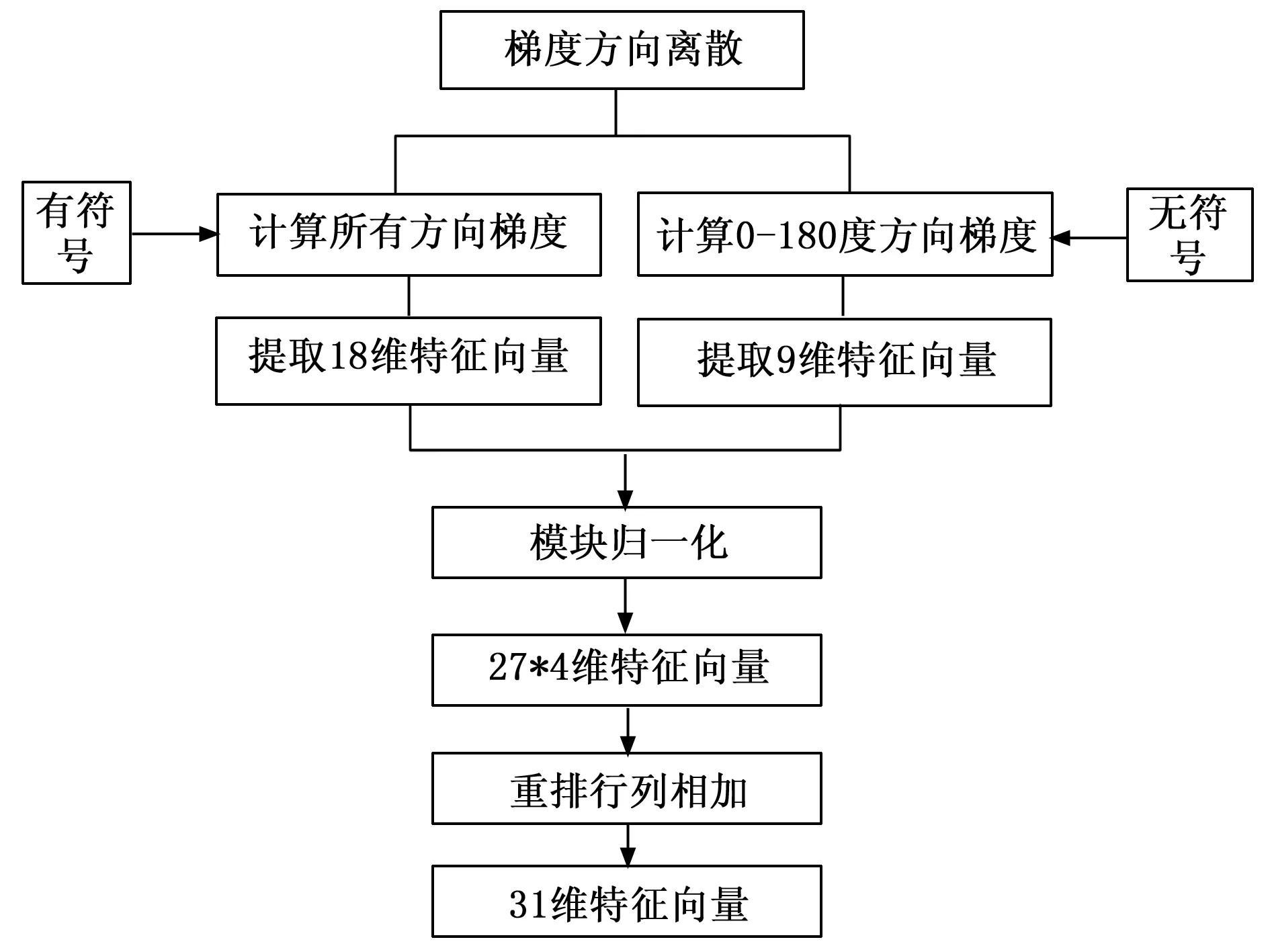
图7 优化的DPM特征提取流程图
如图7所示,本文采用了有符号梯度和无符号梯度相结合的方式来进行DPM特征提取流程的优化,简单原理在于分别计算有符号所有方向梯度和无符号0~180°的方向梯度,在有符号梯度方向提取18维特征向量,无符号梯度方向提取9维向量,得到的27维特征向量,对4个模块参数进行归一化,得到4*27=108维的HTGS特征图像。之后重排为并进行行列相加,得到4+27=31维的特征[13]。综上所述,下面将针对DPM模型的HTGS故障识别过程进行综合阐述:
1)首先,将采集到的HTGS图像通过低通滤波器,并对HTGS图像进行切片,从而得到一系列尺寸变化的图像。
2)与原始模板进行图像对比,将部分模板与3倍率的HTGS图像进行匹配,综合部件模板与特征的匹配程度和最佳位置偏离,得到最佳的匹配结果,该过程实现公式为:
S(x0,y0,l0)=K(x0,y0)+J
(11)
(12)
式(11)~(12)中,(x0,y0)是指HTGS图像识别特征点,l0是指尺度层,S是指匹配度,K(x0,y0)是指待监测的HTGS图像,J是指不同部分模板与3倍率的HTGS图像匹配度,t是指一个随机部分模板。
3)通过低通滤波器进行响应变换,其中响应变换的公式为:
(13)
式(13)中,d是指HTGS图像特征点偏离原始模板位置,(x,y)是指第i个部分模板在尺度层l的最佳偏离位置。(dx,dy)是指相对于第i个部分模板的偏移量。等式(13)的含义为待检测HTGS图像K在(x+dx,y+dy)偏移量处的匹配得分,根据匹配得分系统将智能评估出匹配结果,从而实现巡检机器人视觉故障识别[14]。
3 实验与分析
为了验证水电站故障监测系统的实用性与可靠性,在这一节中,本研究将设计模拟实验。通过巡检机器人调研一年内安徽省芜湖市郊外多个大型水电站水轮机设备,并搭建后台服务器集群用于数据处理,每台服务器的计算机操作系统为Windows10·64位,计算机的开发工具为Visual Studio 2019,OpenCV 3.0,计算机的硬件环境为CPU:Inter(R)Core(TM)i7;主频为2.59 GHz;内存16 G,所用的编码软件JavaScript的版本为ECMA Script 6。
通过巡检机器人检出水电站多种故障图像类型,例如:水轮机组功率不足、调速器问题、水轮机问题、油系统问题、储气罐压力问题、球阀问题、接力器问题等多种问题。此外,水轮机空载流量会因导水机构泄漏、轴承润滑不良等原因而发生变化,轴承润滑不良的原因在于水轮机组推力瓦和镜板之间没有形成足够的油膜厚度,推力瓦和镜板没有分离,推力瓦面得不到充分润滑而引起的烧瓦现象,这种故障情况严重影响水轮机组的运行效率。本研究以轴承润滑不良引起的推力瓦面烧瓦现象作为本研究实验的图像,经过一年时间调研多个大型水电站水轮机采集得到了26 864张故障图像,经过筛选分类等预处理构建了实验数据库,关于巡检机器人监测得到的图像数据如图8所示。
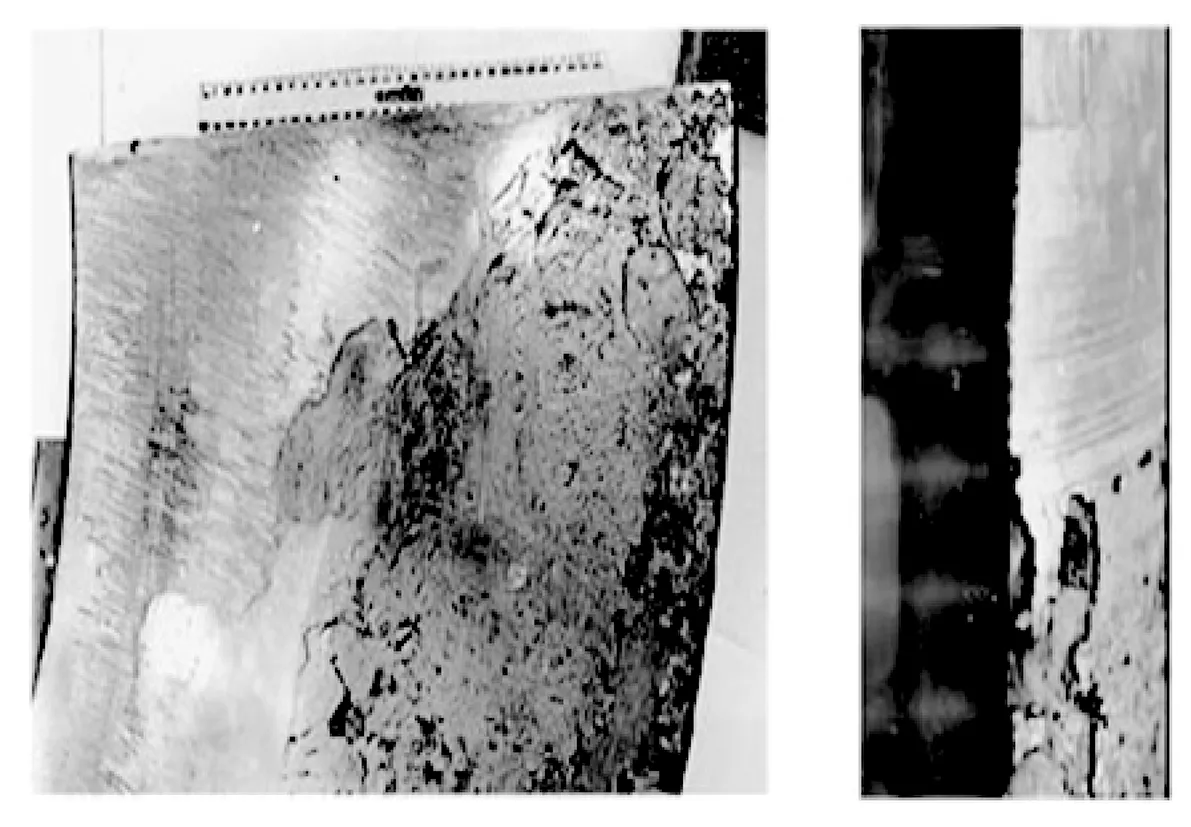
图8 检机器人监测得到的图像
针对上述水电站故障问题,水轮机空载流量的非线性频率分析对水轮机的正确检修具有重要意义。本研究通过构建NOFRFs模型进行特性分析,其相关的主要参数根据实际HTGS设置为:Tw=0.5 s,At=1.06,Ta=5.7 s,eg=0和D=0,模拟时间为500 s,模拟步长为0.01 s。此外,主伺服电机的响应时间常数设置为Ty=0.1。干扰信号设置为xr(t)=0.05 sin(t),并在90秒时施加。为了减少计算量,将NOFRFs的最大阶数N设为3,提取信号设为xu(t)=0.05 sin(t),干扰信号的基频为wf=1/2π。不同空载流量(Qnl=0.1、Qnl=0.2、Qnl=0.3)下HTGS的NOFRF如表2所示。
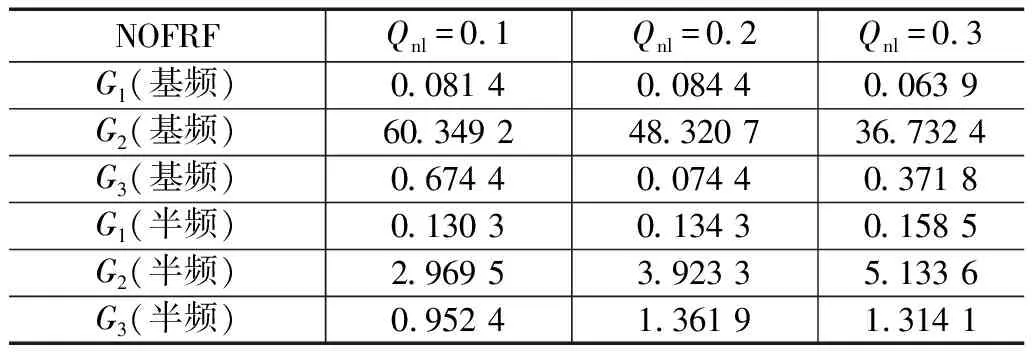
表2 不同空载流量下NOFRF值
如表2所示,随着空载流量的增加,一些非线性特征可以从NOFRFs中反映出来。最明显的变化是G2的半频增加,基频降低。G1的半频有微弱的增加,基频变化不大。G3的半频会增加,G1的基频会有较大幅度的变化。NOFRFs的这些变化可用于HTGS的故障识别,并证实了与空载流量有关。
为了突显基于DPM的故障识别算法的优势性能,以文献[4]中基于人工神经网络(ANN,artificial neural network)的故障监测模型作为比较对象,进行对比实验。从实验数据集中提取0~2 GB的水轮机组故障图像数据量,采用ANN与DPM两种算法的故障诊断系统处理这些故障图像数据,统计不同系统的延迟时间,根据数据量大小和延迟时间为轴绘制曲线如图9所示。

图9 两种系统的延迟时间对比
从图9中可知,本研究所开发的DPM算法处理HTGS数据耗时更短,效率更高,这是因为DPM基于HOG特征采用了模块化的概念,并在归一化处理时,直接将当前单元与周围4个单元的区域归一化,采用这种优化策略提高了巡检机器人视觉识别的效率,充分验证了本研究水电站故障监测系统的实用性与可靠性。
4 结束语
为了达到水电站设备安全稳定运行的目的,从而提高水电行业的经济效益,本研究构建了水电站故障监测系统,其主要内容有:
1)基于巡检机器人视觉对水电站中HTGS进行故障识别,采用PLC控制巡检机器人的信息获取,该技术可以自动控制巡检机器人的行动路线以及故障定位,避免了人为故障诊断造成的错误现象。
2)通过模糊控制算法提高了巡检机器人识别稳定性,并采用一种非线性输出频率响应函数分析HTGS参数,有助于辨识HTGS故障问题。
3)采用基于HOG特征模板优化的DPM算法,结合SVM分类器最大限度地分离出HTGS图像两个类别特征,实现HTGS图像的视觉故障识别。
经过实验验证了该系统的可行性,总结该研究成果,发现在HTGS特征点的分类方面仍具有较大的分类问题,导致了徐建机器人识别精度较低,未来将会进行这方面的探讨与改进。
