一种双关节折叠无人机设计与研究
2022-10-26徐斌锋
徐斌锋
(广东创新科学技术学院,广东 东莞 523960)
随着网络[1]、传感器[2]、通信[3](如ZigBee、LoRa)等技术发展,无人机迎来了飞速发展时代.大量研究表明,非对称折叠翼[4-5]可以提高大型无人机的机动性,使其能够在小半径内快速转弯,并适应更多的工作环境.
由于较大的机翼载荷将对结构设计提出更高的要求,鸟类机翼的复杂变形模式不能直接应用于折叠翼无人机的设计.文献[6]提出了一种基于流形切空间插值的可折叠式变体机翼参数化气动弹性建模方法,从而验证了参数化气动弹性模型的有效性.文献[7]采用ANSYS有限元CAE软件对设计的折叠翼飞机进行了模态和流固耦合分析研究.文献[8]提出了一种基于自抗扰理论的飞行器变形过程中的稳定控制方法.该方法够解决飞行器变形所带来的强非线性和参数时变等问题,保证飞行器的高精度稳定控制.
现有的仿生多关节折叠翼飞机的研究主要集中在折叠机构的设计和变形对静态稳定性的影响上.此外,以往对操纵面效率变化的研究主要集中在输出气动力的变化上.然而,操纵面偏转需要克服气动载荷,气动载荷直接影响操纵面执行器的分布设计,从而影响操纵面效率.因此,本文从气动变化和气动能量消耗的角度出发,设计了一种双多关节折叠翼无人机.为了模拟飞行任务切换过程中机翼的变化,在恒定质心偏移约束条件下,建立无人机Kriging代理模型,同时基于遗传算法确定了无人机内外翼后掠角的参数变化规律.
1 理论介绍
1.1 非定常涡格法
非定常涡格方法[9-10](unsteady vortex-lattice methods,UVLM)是一种计算低速和高雷诺数条件下的常用气动计算方法.
在UVLM中,平均拱度线平面可划分为多个面板,每个面板上都有一个马蹄形漩涡,如图1所示.马蹄形漩涡的有限长度段平行于前缘,并放置在每个面板的1/4弦线上.此外,将2个半无限段设置为平行于自由流,以便没有力作用其上.马蹄涡的诱导速度可由毕奥-萨伐尔定理得到.诺依曼边界条件(neumann boundary condition)要求在每个时间步中位于每个面板3/4弦线中心的配置点处,此时机翼表面没有法向流动,因此有:
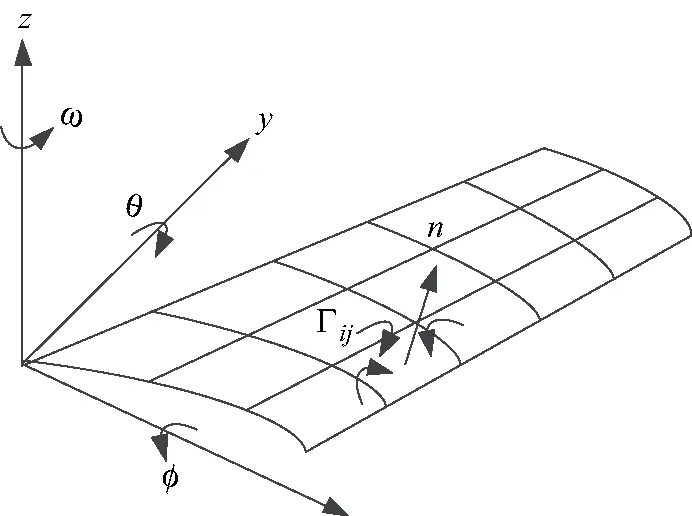
图1 UVLM示意图
(1)
式中,Φ为速度势;V为速度矢量;Ω角速度矢量;r位置向量;Vrel为真空速;n为涡旋格子单元的法向量.
最新脱落尾迹涡的强度设置为等于上一时间步上游后缘脱落涡的强度.一旦尾涡脱落,强度保持不变,并随局部气流移动.最新的梭尾涡位于最后一个时间步中后缘覆盖距离的0.2~0.3处.在这种情况下,可根据线性方程组确定时间t时平均预拱线平面上的循环分布:
(2)
式中,自感生速度集A和尾流感生速度集B分别取决于弧线形状和变形模式,应在每个时间步中进行评估.Γ是马蹄涡的强度;需知,由于飞行和变形而产生的局部流体影响系数包含在集合RHS中,并且与时间相关.
在获得每个时间步的循环分布后,可进一步求得每个面板上的空气动力.根据非定常伯努利方程,非定常升力分为Joukowski升力和表观质量升力两部分.因此,第j个面板产生的非定常升力ΔLj和诱导阻力ΔDj可表示如下:
(3)
(4)
式中,ρ为密度;α为迎角;a为单位展向长度;Λ为扫掠角;S为面积;w为平移速度.
通过叠加机翼零升力阻力的影响,后缘的气动能耗WTE可以表示为变形过程中所有面板的总和.此外,能量对时间的积分可以近似为有限个时间周期的和:
(5)
式中,δTE为后缘机翼偏角;NTE后缘机翼数量;l为气动力臂.
此外,将每个小时间段内的空气动力视为常数.类似地,变形过程中机翼和水平尾翼(horizontal tail,HT)的气动能耗WWing和WHT可表示为:
(6)
(7)
式中,ΔF表示每个涡格单元上的气动力;Λ为扫掠角.
1.2 刚体动力学模型
令uk(k=1,2,…,f)表示系统的速度,其中包括f个度量变量.第i个刚体相对于惯性参考系的平移速度vci和角速度ωi可分别表示为广义速度的线性组合[11]:
(8)
(9)

(10)
(11)
(12)

(13)
(14)
式中,Ji为惯性张量;aci为第i个刚体的质心加速度.
2 双关节折叠无人机设计与分析
2.1 无人机设计
根据机构和结构的设计要求,双关节折叠无人机结构设计,具体如图2所示.
为保持目标无人机的质心恒定,内外翼的质心偏移应满足:
ΚΔxin+(1-Κ)Δxout=0.
(15)
式中,Κ为机翼质量比;Δxin为內翼质心偏移;Δxout为外翼质心偏移.由于内翼部分通常包含大部分机翼结构重量,故Κ的范围为0.5~1.
与鸟类翅膀不同,针对后掠翼与前掠翼气动特性的差异,目标无人机内外翼均采用后掠翼设计.为了减小折叠过程中翼型对气动性能的影响,采用了剪切扫掠角变化模式.模拟鸟翼的组合变形模式,将机翼后缘的偏转和外翼的不对称后掠角变化相结合,产生机动飞行力矩.双关节折叠无人机的基本设计参数如表1所示.后缘控制面设计从弦的末端延伸至25%,并沿每个机翼部件的总跨距长度延伸.

表1 无人机基本设计参数
2.2 无人机模型参数优化
2.2.1 无人机Kriging代理模型
通常,最大升力系数(CLmax)和最大升阻比(L/Dmax)是评估无人机机动性和巡航能力的重要参数;同时后掠角、马赫数和迎角都是直接影响飞机气动特性的参数.因此,本部分以这些参数为自变量,建立了无人机Kriging代理模型[12-13].
在给定的机翼质量比Κ和迎角前提下,对应于CLmax和L/Dmax的内外翼后掠角不是唯一的.此外,气动计算得到的初始种群足以搜索最优配置,因此根据具体任务要求,采用遗传算法来搜索无人机的最优配置.因此,约束条件描述如下:
s.t.ΚΔxin+(1-Κ)Δxout=0.
(16)
式中,Δxin为內翼扫掠角0°≤Δxin≤10°;Δxout为外翼扫掠角12°≤Δxout≤30°;Ma为马赫数0.2≤Ma≤0.5.
2.2.2 无人机Kriging代理模型
遗传算法[14](genetic algorithm,GA)是一种模拟自然界生物进化过程的全局随机搜索算法.该算法具有执行简单、鲁棒性强,不受搜索空间限制性约束等优点.此外,GA不需要连续性、导数的存在和单峰等假设,但初始种群的选择会影响搜索性能.算法流程如图3所示.
对遗传算法进行了50次仿真,所建模型的CLmax和L/Dmax的最大绝对误差分别为6.11×10-6和5.56×10-6.图4和图5所示为不同马赫数下对应于CLmax和L/Dmax的内外翼扫掠角.可以发现CLmax对应于内外翼的多个扫掠角.考虑到控制面的偏转角速度,要找到在每一时刻都具有最佳性能的连续扫掠角规律就更加复杂,甚至是不可能的.因此,为简单起见,对应于的CLmax内外翼的后掠角分别定义为Δxin=10°和Δxout=12°;与之类似,与L/Dmax相对应的内翼和外翼的后掠角分别定义为Δxin=5.71°和Δxout=30°(Κ=0.6)与Δxin=6.67°和Δxout=30°(Κ=0.71).

图2 双关节折叠无人机结构设计
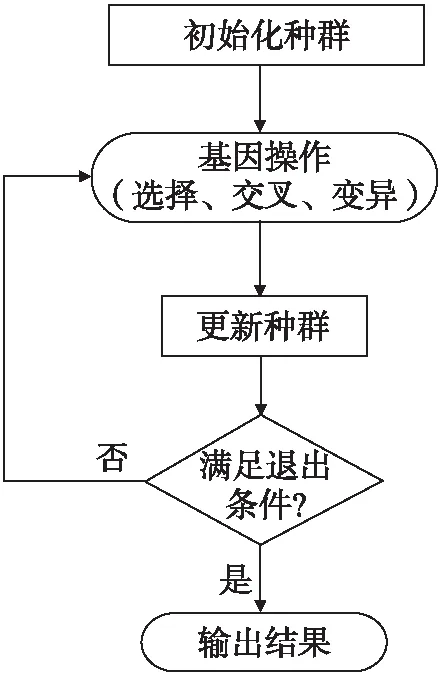
图3 算法执行过程
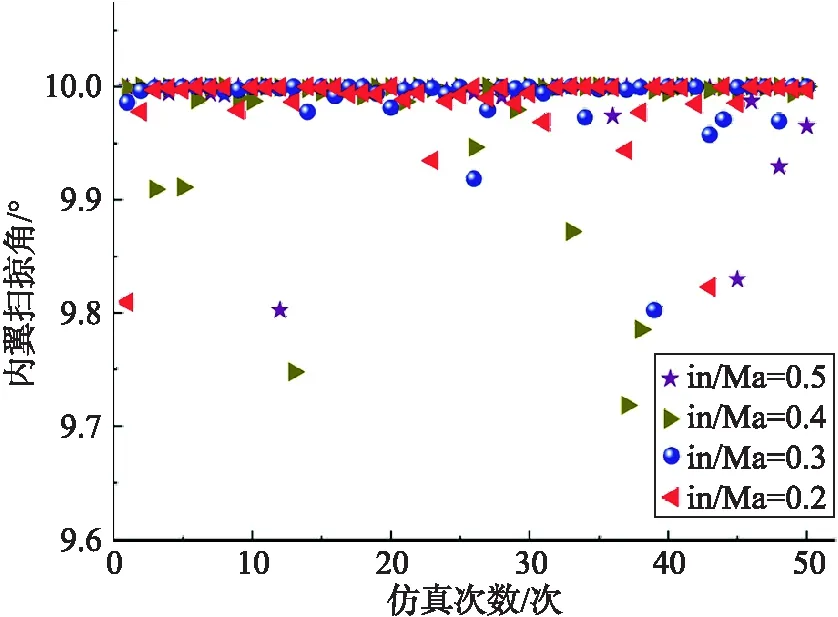
图4 不同马赫数下內翼扫掠角
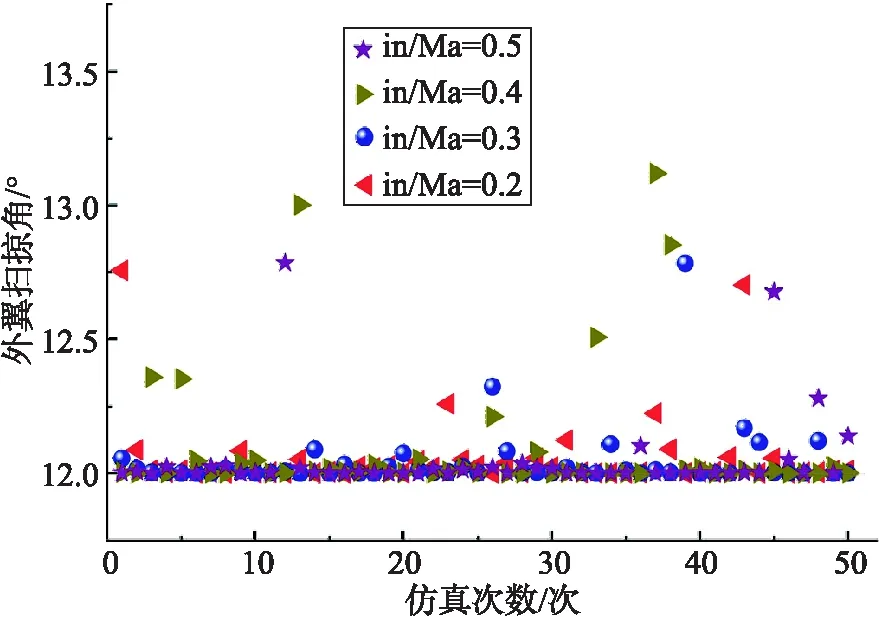
图5 不同马赫数下外翼扫掠角
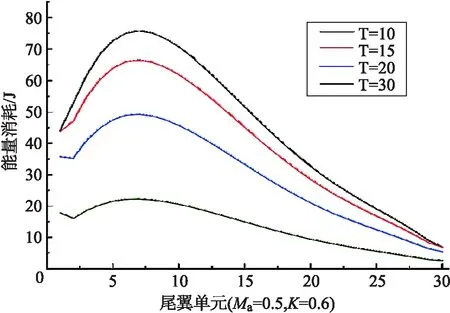
图6 无人机气动能耗变化统计
2.3 性能分析
图6所示为无人机气动能耗变化统计图.可以看出,在给定内外翼后掠角的情况下,单位时间内的能量消耗沿翼展方向的分布呈现先增大后减小的规律,且最大值位于第7个单元附近.在运动的初始阶段,单位时间内偏角对外翼的椭圆压力分布影响不大.随着外翼偏角的增大,翼根附近单位升力的增加大于其他单位升力的增加.随着时间的推移直至运动后期,这种效应变得更加明显.随着单位时间偏转角的减小,在运动结束时,翼根附近的能量消耗甚至比其他单元的能量消耗更大.
3 结语
本研究从气动变化和气动能量消耗的角度研究仿生变形,并基于仿生学提出了一种双关节折叠无人机设计方案.与鸟类翅膀不同,针对后掠翼与前掠翼气动特性的差异,目标无人机内外翼均采用后掠翼设计.为了减小折叠过程中翼型对气动性能的影响,采用了剪切扫掠角变化模式.模拟鸟翼的组合变形模式,将机翼后缘的偏转和外翼的不对称后掠角变化相结合,产生机动飞行力矩.此外,以最大升力系数和最大升阻比为指标,基于遗传算法搜索无人机的最优配置.所提方案为仿生无人机发展具有一定借鉴作用.
