基于非支配排序遗传算法II 智能搜参的精跟踪系统
2022-10-25王旭张亮涂成翔王婷婷王建宇
王旭,张亮,涂成翔,王婷婷,王建宇,3,4
(1 中国科学院上海技术物理研究所空间主动光电技术重点实验室,上海 200083)
(2 中国科学院大学,北京 100049)
(3 上海科技大学 信息科学与技术学院,上海 201315)
(4 上海量子科学研究中心,上海 201315)
0 引言
由于信号光非常微弱和通信链路易受干扰等原因[1],空间光通信[2]和空间量子通信[3]对于终端载荷的跟踪系统的精度要求极高。在精跟踪阶段,系统必须满足高精度、大带宽的要求[4]。空间量子通信不仅可以使空间站与地面之间进行高速、实时、保密的通信,而且未来还可以应用于卫星与卫星之间,构建天地一体化网络,是一种非常有前景的通信技术,因此对通信终端精跟踪系统的研究有重要意义。
在美国、日本和欧洲空间局(European Space Agency,ESA)的空间光通信项目中,捕获、跟踪、瞄准(Acquisition,Tracking and Pointing,ATP)系统的跟踪精度可以达到1~5 μrad[5]。ATP 系统普遍采用复合轴跟踪的方案[6],即在粗跟踪子系统内嵌套对其残余误差信号进行处理的精跟踪子系统[7]。精跟踪子系统的精度决定了整个终端系统的跟踪精度[8],因此精跟踪系统的控制算法是ATP 系统实现高精度跟踪的关键。
目前应用最多的精跟踪控制算法为比例-积分-微分(Proportional-Integral-Derivative,PID)控制,PID的结构简单且具有很高的鲁棒性,但精度比较有限[9]。在此基础上采用提高控制系统的增益或增加环路积分个数的方法,虽然可能提高精跟踪系统的带宽,但是容易破坏系统稳定性[10]。由于加速度计存在精度和响应时间的问题[11],用加速度计测量振动噪声并用前馈控制驱动精跟踪电机的方法虽然能得到较好的仿真结果,但实际应用效果有待考证[12]。由于精跟踪控制回路存在探测器采集数据,而数据处理产生的延时会影响跟踪精度,可以用预测信号补偿的方法来补偿时延迟,但该方法对系统模型的依赖性较高[13]。崔宁等设计了模糊自抗扰控制器,跟踪精度可达±8 μrad[14]。霍鞠等将模糊自适应PID 应用在精跟踪控制系统中,在线校正控制参数,虽然跟踪精度的仿真结果可达0.22 μrad[15],但不便应用于星载终端。双闭环控制可以提高快速反射镜(Fast Steering Mirror,FSM)的动态响应速度和稳定性,并可补偿外环的时延,其中内反馈信号通过应变表传感器测量FSM 的响应来获取[16]。李琦等针对多目标捕获跟踪系统中的FSM 设计了H∞控制器,并提出了基于最小二乘支持向量机的磁滞补偿器以进一步提高控制精度[17]。聂卓赟等针对一类最小相位装置提出了一种抗干扰PID 方案,将自抗扰机制嵌入经典PID 结构中[18]。西安光机所的苏秀琴等设计了自适应控制器和PID 控制器并行工作的系统,在实验平台和地面终端验证的结果表明,在跟踪精度和稳定性上均有良好的表现[19]。哈尔滨工业大学的段广仁团队提出了一种参数化设计方法,对粗、精跟踪两级子系统进行整体设计,显著提高了跟踪和对准精度,但工程实用化困难[20]。
空间光通信中精跟踪系统的精度易受到卫星平台的角微振动等外界干扰的影响,为了解决该问题,需要进一步提升系统的干扰抑制性能,达到亚微弧度尺度的跟踪精度以满足更远距离光通信的要求。由于远距离空间光通信中信号光束的发散角极窄,并且空间光链路的跟踪误差会带来附加的损耗,因此必须依靠高性能的精跟踪系统来建立高精度的空间光链路。千公里级的空间光通信需要微弧度量级的跟踪精度,而当通信距离提升一个数量级到万公里级时,通信终端的精跟踪系统的跟踪精度需要对应提升一个数量级,达到亚微弧度量级。目前典型光通信卫星终端的传统精跟踪系统可以达到微弧度尺度的跟踪精度,且可以满足千公里级通信的需求,而其跟踪精度和干扰抑制能力若得到较大的提升,即可用于更远距离的空间光通信场景。在此基础上,本文提出了附加集成模块的设计方法,为了实现更高的跟踪精度和更强的干扰抑制能力,同时保证闭环系统的稳定性,采用非支配排序遗传II 算法(Non Dominated Sorting Genetic Algorithm-II,NSGA-II),主要以控制带宽,误差抑制能力和稳定性为性能指标,获得了该集成模块的全局最优控制器参数,实现了精跟踪系统的智能搜参方法,并基于某典型光通信卫星终端在轨实测的角干扰数据进行了仿真分析。在不同频率的干扰下进行了实验,验证了实现的精跟踪系统具备更好的性能和效果,可以满足未来空间光通信场景下的应用。
1 精跟踪系统设计方法
精跟踪系统接收到带有粗跟踪残差干扰的光束后,探测器上的光斑位置不断改变。精跟踪过程如图1所示,控制器实时计算实际光斑的位置与预设的跟踪点的差值,并传递给PID 控制器,得到相应的模拟输出量。数模转换器把实时产生的模拟量转换为数字量输入压电FSM 的驱动电路,使压电FSM 偏转对应的角度来校正光斑位置到预设的跟踪点上,完成系统闭环。精跟踪系统中,被控对象为压电FSM,模型可以近似等效为二阶惯性振荡系统[21],即
式中,k为FSM 的增益,ξ为阻尼系数,ωn为固有谐振频率。FSM 的驱动电路可以等效为一阶低通滤波系统,即
式中,T为时间常数。二者在系统中以串联形式连接,可由式(1)和(2)得到被控对象整体的传递函数
系统中的CMOS 探测器可视为一阶延时系统,传递函数可用一阶惯性单元表示,即[22]
式中,Tm为时间常数。
精跟踪系统的传统方案采用了PID 控制算法,即[6]
式中,u(t)是PID 控制算法的输出,e(t)是控制系统的输入与输出值之差,Ti和Td分别为积分时间常数和微分时间常数。经典PID 控制算法的时域表达式经过拉普拉斯变换后,以传递函数形式表示为
联立后可得
为了使控制系统具备可实现性和达到期望的控制性能,km和Tm分别为控制器增益和时间常数。结合式(3)和(8),系统的开环传递函数和闭环传递函数分别为
当闭环传递函数的分母为0 时,可以得到系统的特征方程,即
根据劳斯-赫维兹(Routh-Hurwitz)准则,式(11)的零点全位于复数空间的左半平面,因此系统仅在式(12)成立的条件下稳定。
由式(9)可知该传统系统是Ⅰ型控制系统,若输入为阶跃信号,则跟踪后的稳态误差为0;若输入为斜坡信号,稳态误差为固定值;若跟踪加速度信号,稳态误差会达到无穷大。传统的精跟踪系统的干扰抑制能力较弱,干扰抑制带宽约为150 Hz,对低频段范围内(10 Hz 以下)的干扰具有20 dB/10 倍频程的抑制能力[23],需要进一步提高。
对于光电跟踪系统而言,核心能力是跟踪处于快速且轨迹不确定的目标,高阶稳态误差的抑制是其中最重要的因素之一[24]。为了大幅提高控制系统对误差的抑制能力,在传统控制系统的PID 控制器后级联一个集成的积分模块,表示为
式中,、a和b为积分模块的待确定参数。
由式(8)和(13)可得,新的PID 控制器表示为
结合式(3)和(14)可知当前系统的开环传递函数为
此系统是Ⅱ型控制系统,当输入信号是阶跃信号和斜坡信号时,稳态误差都为0。与得到式(10)和(11)的原理相同,当前控制系统的闭环传递函数和系统特征方程分别为
若要此系统稳定,则对于待确定的参数a、b和,可以得到取值范围为
根据前期基于高精度光学传感器,对于墨子号卫星的角微振动进行的测量和研究,得到了微振动的功率随着频率升高总体呈现下降趋势,能量大多集中于低于30 Hz 的低频段的结论[23]。因此,在优化控制系统时,力求在基本不影响系统带宽的情况下,在低频范围达到更小的跟踪误差和更优的干扰抑制能力。假设频率区间为(0,ω0),则
2 基于NSGA-Ⅱ的控制系统参数整定
2.1 算法原理
NSGA-II 是一种基于支配的多目标优化算法,针对NSGA 中计算复杂度高、无精英策略和需要人为确定共享参数的三大难题,分别提出快速非支配排序算法、引入精英策略和采用拥挤度[25]。与其他多目标优化算法相比,NSGA-II 基于快速非支配排序法(Fast Non-dominated Sort,FNSM)和精英策略寻找帕累托最优解,个体的顺序由个体的拥挤距离和FNSM 计算的层级共同确定[26]。
如图2 所示,NSGA-II 的算法流程为:1)通过快速非支配排序算法将规模为N的种群划分为几个层级,其中第一层级是进化种群的非优势个体集合,第二层级是排除第一层级个体后从进化种群中得到的非优势个体的集合,依此类推;2)计算同一层级下的个体的拥挤距离,以保持种群的多样性;3)根据种群中每个个体i的非支配序(层级数)irank和拥挤度id,通过拥挤度比较算子进行比较,保留胜出的个体;4)将新产生的种群与其父代种群合并,形成一个规模为2N的大种群;5)对于步骤4)得到的大种群重复步骤1)~3)的流程;6)根据精英策略选择前N个个体生成新的种群用于下一次迭代。
NSGA-II 算法的伪代码为:
2.2 控制系统智能搜参
为了整定出控制器参数的全局最优解,对于四个待确定的参数kˉ,a,b和Tm,主要选取了控制系统的带宽、跟踪误差抑制比和条件稳定性三个指标进行分析,并作为智能搜参的约束条件。对于闭环控制系统Tn-PID来说,期望带宽不低于150 Hz,以弧度为单位表示的带宽ωB可以由式(20)求得
对于闭环控制系统Tn-PID,误差传递函数和误差抑制比可分别表示为
式中,ω0和ωc分别表示初始频率和穿越频率。
在实际的控制系统中,积分饱和定义为由控制器中的积分项引起的执行机构饱和,虽难以避免,却需要尽可能抑制[27]。当较大的干扰信号输入到光电跟踪系统时,若执行机构已经到极限位置但仍然不能消除偏差时,即使PID 算法输出的结果继续增大或减小,非线性执行机构也无法做出对应调整对干扰进行抑制[28]。开环系统Fn-PID的波特图如图3,由于在工程实际中,开环系统的相位裕度通常应该大于45°,则系统的穿越频率ωc处于[ωa,ωb]区间内时,系统是稳定的。
对于应用于精跟踪系统的控制算法而言,具有较大的控制带宽,尽可能大的误差抑制比和较大的条件稳定性区间非常关键,据此可以构建目标函数为
对于式(23),引入一个系数组ε=[ε1,ε2,ε3](ε1,ε2,ε3<0),一方面将目标函数的值设为相同数量级,解决因目标函数值太小而产生的在迭代过程中难以优化的问题,另一方面把求解最大值的问题转化成算法更容易实现的求解最小值问题。对于当前系统的四个参数,a,b和Tm,根据系统稳定时最大的带宽、误差抑制能力和条件稳定区间求取最优解集,即
第一个约束条件由系统的稳定性得到,即式(18)。考虑到系统内传感器的延迟,精跟踪系统的开环幅值裕度GM 和相位裕度PM 约束为
式中,ωc为图3 所示的穿越频率,ωx即系统的截止频率,∠|Fn-PID(jωc)|表示穿越频率ωc下的相移。式(25)是多目标寻优的第二个约束条件。
压电快速反射镜作为被控对象,通过扫频和参数识别,可得参数k=18.5,ξ=0.35,ωn=6 280 rad/s 和T=0.000 182,由式(3)可得
由式(8)得传统的PID 控制器为
由式(14)得附加了集成模块的新控制器为
由式(9)可得传统的系统开环传递函数为
由式(15)可得当前系统的开环传递函数为
精跟踪系统探测相机的帧频为2 kHz,干扰抑制带宽可以达到100 Hz 以上,根据传感器的采样频率通常是带宽的10 倍[29],闭环控制带宽ωB约200 Hz。对于频率范围0.1 Hz 到200 Hz 和200 Hz 到1 000 Hz 而言,可得到参数a,b的范围是[1/400π,1/0.2π],即a,b∈[0.000 8,1.59],参数Tm的范围是[1/2 000π,1/400π],即Tm∈[0.000 16,0.000 8]。式(25)对FPID同样适用,可得Tm=0.000 21,km=213.4。使用MATLAB 软件编程实现NSGA-Ⅱ算法并得到如图4 所示的帕累托前沿面,选取误差抑制能力f2为核心指标寻找参数组的最优解,得到四个待确定的参数分别为:kˉ=3 948,a=1.2,b=0.03,Tm=0.000 21。NSGA-Ⅱ算法的复杂度较高、耗时较长,但是利用其进行智能搜参的过程不需要实时性。为了避免影响实际精跟踪系统的性能,采用MATLAB 进行离线计算的方式实现了控制参数的整定,将整定好的参数烧写到硬件系统的内存中,系统的核心处理器FPGA 可快速调用参数进行运算,因此该改进系统的计算速度相比传统系统并无太大差别。
2.3 仿真对比分析
为了实现较好的性能,光电跟踪系统在研制过程中,需要不断迭代、优化和改进。在某典型卫星平台搭载的终端载荷投入使用之前,使用MATLAB/Simulink 仿真工具设计了跟踪系统的控制模型。针对该模型的误差抑制特性进行了分析,波特图如图5 中蓝色虚线所示,可知系统的误差抑制带宽大约为131.4 Hz。通过将在轨工作时实际测量的角干扰数据输入到仿真模型中,模拟了实际场景下精跟踪系统的工作条件。仿真结果表明,精跟踪误差为0.646 μrad,与卫星平台在轨工作时实际测量的精跟踪结果非常近似。精跟踪误差的频率分布如表1,功率谱密度分析如图6 中蓝色曲线所示,整体处于10-2μrad2/Hz 水平以下。
由于跟踪误差大多集中在中低频段,为了进一步提高对于该频段误差分量的抑制能力,根据自动控制原理,设计了一种二阶串行PI 控制系统,即在传统的PID 控制器后串联一个比例-积分环节。误差抑制特性分析如图5 中灰色虚线所示,误差抑制带宽约为105 Hz,相比传统的控制系统下降了20.1%。相比传统的精跟踪系统,该系统仅在60 Hz 以下的中低频段对于跟踪误差的抑制能力有明显提升,达到了-40 dB/10 倍频。由于带宽减小,该系统对于高频段干扰的容忍度下降,干扰抑制能力不但没有提升,反而略有下降。
采用3.2 节中式(31)的参数,以传统精跟踪系统为基础,构建了改进精跟踪系统的仿真模型,如图7。采用相同的Simulink 建模方法,通过将干扰输入和输出接口设定为断点的方式,仿真绘制了反映系统本身特性的波特图,其误差抑制特性曲线如图5 中红色实线所示,可知系统的干扰抑制带宽大约为175.7 Hz,相比于传统系统的131.4 Hz 提升幅度为33.7%,相比二阶PI 串行控制系统的105 Hz 提升67.5%。为了验证该模型在精跟踪工作场景下的性能,将相同的实测角干扰数据作为仿真模型的输入,仿真结果表明,精跟踪误差为0.519 μrad,相比于原系统精度提升19.5%。
该精跟踪控制系统的误差频率分布如表1,对于0~1 Hz、1~10 Hz、10~50 Hz 和50~100 Hz 四个频段而言,该系统相比传统系统的精度分别提升了99.5%、95.7%、71.3%和29.9%,证明该系统明显提高了低频段误差的抑制能力。改进精跟踪系统的跟踪误差的功率谱密度分析如图6 中红色曲线所示,与表1 和图5的结果吻合良好。综上,本文设计的精跟踪系统的控制效果明显优于传统精跟踪系统。

表1 改进精跟踪系统与传统系统的跟踪误差频率分布对比Table1 Comparison of tracking error frequency distribution between improved precision tracking system and traditional system
3 实验验证
精跟踪系统实验原理如图8,整个实验系统均放置于气浮光学平台上。信号发生器用来产生不同频率的正弦干扰信号,快反镜驱动器在接收到干扰信号后,产生对应变化的电压驱动干扰FSM 动作,光纤激光器产生波长808 nm 的光束经过光纤和衰减器等光学元件后,经准直模块产生直径20 mm 的光束,入射到干扰FSM 上,再反射进入精跟踪系统的望远镜内,该望远镜的放大倍率为10。望远镜收集到的信标光入射到跟踪FSM 上,跟踪快速反射镜偏转角度随电压线性变化,满行程电压100 V 对应的偏转角度为±5 mrad。跟踪FSM 的反射光通过孔径光阑后进入精跟踪相机的镜头,精跟踪相机的组合焦距为1 m,探测器像元尺寸为5.5 μm×5.5 μm,采用128 pixels×128 pixels 开窗,帧频为2 000 帧/s,最后通过相机内的阈值质心算法计算出光斑的位置,在上位机上可实时观察和获取图像信息和质心信息。由于系统的两个正交轴相互独立且控制特性相同,因此选定X轴进行实验和分析。精跟踪系统的性能由质心序列的标准差进行分析,实验室环境下的精跟踪系统实验如图9。
精跟踪相机为行输出曝光的相机,其x与y方向的噪声特性存在不同,但无论是传统系统还是改进系统,其探测相机系统都保持一致,且质心定位的算法也没有改变,即噪声特性在x、y方向上虽然不同,但同方向的对比不受影响。由于改进系统相比传统系统仅优化了控制算法和参数整定,因此实验以干扰抑制比为对比指标,若能验证x轴方向的跟踪精度和干扰抑制能力有较大提升,即可佐证y方向的性能也存在同样的提升。
表2 给出了数个特定干扰频率下,改进系统与传统系统的干扰抑制性能对比,频率区间覆盖低频到高频。实验中,随着干扰频率的增大,适当降低信号发生器的输出峰峰值,即降低干扰的幅度。从表中可以看出,改进精跟踪系统对于入射光轴的抖动干扰存在明显的抑制,跟踪精度和干扰抑制性能相比传统系统大幅度提升,其中在10 Hz 以下尤为突出,例如在干扰频率为5 Hz和10 Hz 时,干扰抑制比分别达到了-53.57 dB和-46.31 dB,提升幅度超过20 倍。
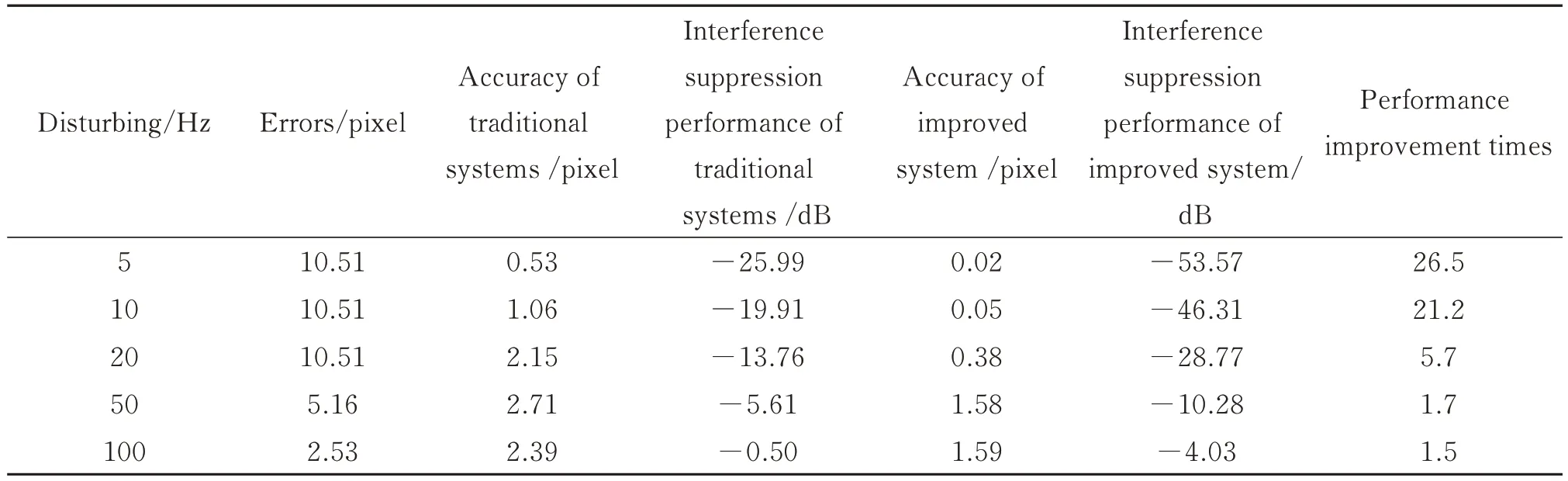
表2 改进系统与传统系统的跟踪精度和干扰抑制性能对比Table 2 Comparison of tracking accuracy and interference suppression performance between the improved system and the traditional one
分别将传统系统和改进系统在不同干扰频率下的干扰抑制性能与图6 中理想情况下的仿真结果比较。在1~100 Hz 范围内,从代表性的频率点上来看,图6 中的5 Hz、10 Hz、20 Hz、50 Hz 和100 Hz 对应的干扰抑制比分别约为-60 dB、-50 dB、-40 dB、-25 dB 和-8 dB;图10 与表2 中的对应频率的干扰抑制比分别约为-53.57 dB、-46.31 dB、-28.77 dB、-10.28 dB 和-4.03 dB,实际系统的性能相比理想的设计值虽存在一定差距,但在20 Hz 以下部分已经极为接近。二者趋势相同,随着频率的升高,干扰抑制能力不断下降。考虑到实验过程中不可避免地存在环境因素等干扰,因此实验结果与仿真结果具有较好的吻合度。
利用高斯函数拟合的方法,将精跟踪系统的干扰抑制性能实验结果绘制成曲线图,如图10 所示。为了方便比较,横坐标采用了与图6 相同的对数坐标,可见该曲线与理想情况较为接近。该实验结果的物理意义在于,验证了对于精跟踪系统中多个关键部件数理建模的正确性,在传统系统的基础上附加集成模块设计的合理性,实现跟踪系统智能搜参方法的可行性,以及系统的干扰抑制设计性能与实际性能之间较好的吻合度。该系统对于1~5 Hz、5~10 Hz、10~20 Hz 和20~50 Hz 频率范围内的干扰能分别抑制500 倍以上、200~500 倍、28~200 倍和3.3~28 倍。本文设计的改进精跟踪系统实现了更高的跟踪精度和更强的干扰抑制能力,可以满足未来空间光通信场景下的应用。
4 结论
为解决空间光通信中精跟踪系统的精度易受外界干扰影响的问题,实现了一种基于NSGA-II 智能搜参的精跟踪系统,进一步提升了跟踪精度和干扰抑制性能,可达到亚微弧度尺度的跟踪精度。在传统精跟踪系统的基础上,提出了附加集成模块的设计方法,并采用NSGA-II 算法,主要以控制带宽,干扰抑制能力和稳定性为性能指标,得到了全局最优参数。基于某典型光通信卫星终端在轨实测的角干扰数据的仿真分析,对比了传统系统和改进系统的跟踪精度和干扰抑制性能,结果表明:在保持了闭环系统的稳定性的基础上,改进精跟踪系统的精度和性能显著优于传统系统,提升误差抑制的带宽约33.7%,提高全频段的误差抑制能力约19.5%,其中10 Hz 以下的干扰误差抑制性能提升幅度高达95%以上。最后,在实验室环境下搭建了实物测试系统,验证了该系统的跟踪精度和干扰抑制性能相比传统系统大幅度提升,其中在10 Hz 以下尤为突出,提升幅度超过20 倍,且实验结果与仿真结果具有较好的吻合度。本系统可用于更远距离以及更高精度要求的空间光通信场景,对未来空间光通信领域的发展具有重要意义。
此外,由于本文的智能搜参方法是基于性能最佳,因此在系统的稳定性上还有优化的空间,值得进一步研究。