基于道平均的钢筋砼衬砌缺陷识别
2022-10-24陈海涛马远刚吕曹炯
陈海涛,马远刚,吕曹炯
(1.桥梁结构健康与安全国家重点实验室,湖北 武汉 430034;2.中铁大桥科学研究院有限公司,湖北 武汉 430034)
1 引 言
受隧道施工工艺及现场管理水平等因素影响,衬砌内部混凝土脱空现象已成为现代隧道建设的通病,空洞的存在降低了衬砌的承压能力,严重时可能造成混凝土掉块,如果得不到及时处治,必然会影响隧道的正常运营和行车安全[1]。探地雷达因其高效、快速、无损及直观等特点[2],已成为隧道衬砌检测的主要手段[3,4],近年来,已有大量学者[5-7]针对探地雷达隧道衬砌检测及数据处理进行了研究,但对钢筋砼衬砌内部的脱空缺陷进行有效识别仍是探地雷达检测的重点难点。孙忠辉等[8]、刘伟等[9]通过进行隧道衬砌地质雷达检测的正演模拟验证了衬砌中钢筋、钢拱架以及隧道不同充填溶洞的检测效果及反射特征;徐茂辉等[10]、杨威等[11]研究了各种相邻钢筋的雷达图像,并总结出一些对钢筋砼雷达现场检测有益的结论;徐浩等[12]对钢筋砼衬砌中不同厚度的脱空情况进行了正演模拟及频谱分析;黄玲等[13]对钢筋混凝土缺陷进行了探地雷达正演模拟,并提出利用F-K偏移来压制二衬钢筋形成的多次波对缺陷体信号的影响,以突出缺陷体形态特征;吴宝杰等[14]、赵勇等[15]对不同型号探地雷达数据的格式与读取进行了研究。杨勇[16]研究了探地雷达回波信号中的方向特性,并提出采用曲波变换的方法,构建水平方向滤波器,可以实现检测钢筋混凝土中的空洞。
在隧道衬砌探地雷达检测中,由于目标体内介质均匀,钢筋、钢拱架及其他预埋件的埋设均呈现较明显的规律性,雷达剖面中未知的干扰因素较少,而水平方向特征差异是钢筋、钢拱架和空洞病害回波方向特征的主要区别。鉴于此,本文提出利用滑动窗口内道平均来实现对钢筋混凝土衬砌内部空洞缺陷的识别。
2 方法原理
2.1 探地雷达衬砌检测原理
探地雷达对在隧道衬砌检测时,由发射天线以宽频带短脉冲形式向衬砌内部发射电磁脉冲波,入射电磁波在衬砌混凝土内部传播过程中若遇到钢筋、钢拱架、空洞等有电性差异的界面时,会产生一定强度的反射波和绕射波,并被衬砌表面的接收天线所接收,雷达天线在衬砌表面沿测线移动,反射回来的电磁波信息即可把衬砌内部电磁差异的分布特征及形态反映出来[17-20],探地雷达检测原理图如图1所示。
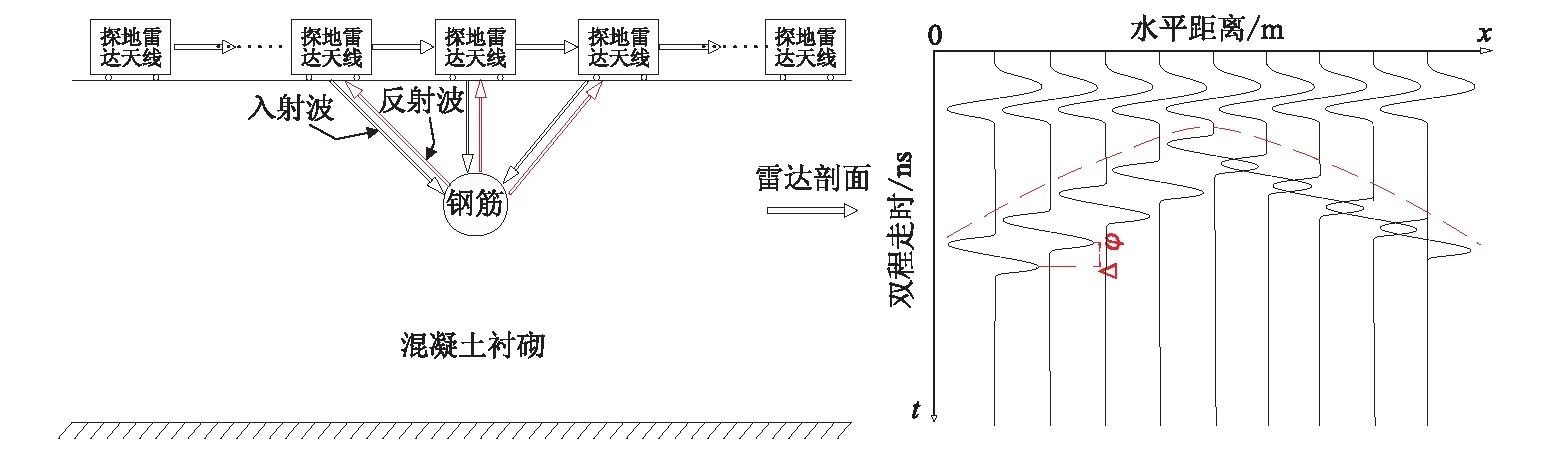
图1 探地雷达检测原理Fig.1 The GPR detection schematic diagram
2.2 道平均的理论基础
(1)
式(1)中:2N+1为窗口的宽度,用道数表示;i为窗口中心记录道的道号;j为窗口内任一记录道的道号。
重复上述过程,通过滑动窗口中心位置即可实现对整个雷达剖面的道平均操作。
3 道平均算法的实现
道平均算法的主要步骤如下:①获取原始雷达剖面中的总道数Traces;②通过对话框输入滑动窗口的宽度Width;③计算剖面前“Width/2”个雷达记录道;④计算剖面中间 (Width/2~(Traces-Width/2))个雷达记录道;⑤计算剖面最后 “Width/2”个雷达记录道;⑥返回经道平均处理后的雷达剖面数据。
本文通过Matlab语言实现了上述计算过程,部分核心代码如下:
function [Out_D, Width] = trsm( d )
%输入 : d为2维GPR原始数据矩阵
%输出 : Out_D为经道平均处理后的2维GPR数据矩阵
% Width为输入的滑动窗口宽度,用道数表示
[Samples, Traces] = size(d); %获取原始数据矩阵大小
%%%通过对话框输入滑动窗口大小
answer = inputdlg('Give Window Width as Number of Traces',' ',1);
if isempty(answer)
Out_D = [];
Width=[];
return;
end
getc = char(answer{1});
comma = strfind(getc,',');
if ~isempty(comma)
getc(comma) = '.';
end
Width = floor(str2num(getc));
Width = Width(1);
Out_D = d;
hw = waitbar(0,'Filtering in Progress'); %%设置进度条
%%%计算剖面前 “Width/2” 个雷达记录道
tr = 1 : floor(Width/2);
average_tr = mean(d(:,tr)')';
Out_D(:,tr) = average_tr*ones(1,length(tr));
%%%计算剖面中间 (Width/2~(Traces-Width/2))个雷达记录道
for i = floor(Width/2)+1 : Traces - floor(Width/2)
tr = i - floor(Width/2) : i + floor(Width/2);
average_tr = mean(d(:,tr)')'; %对滑动窗口内雷达记录进行道平均
Out_D(:,i) = average_tr; %将窗口内雷达记录道均值赋予窗口内中心道
waitbar(i/Traces);
end
%%%计算剖面最后 “Width/2”个雷达记录道
tr = Traces - floor(Width/2) + 1 : Traces;
average_tr = mean(d(:,tr)')';
Out_D(:,tr) = average_tr*ones(1,length(tr));
close(hw);
return
4 数值试验
4.1 衬砌模型建立
为验证道平均算法的效果,了解钢筋、钢架及空洞的波场特征,通过建立二衬中不含钢筋及二衬中含有钢筋两种复合式衬砌模型,进行探地雷达正演模拟。隧道衬砌模型主要参数如表1和表2所示,相对介电常数参考实际检测过程中的标定情况进行设定。
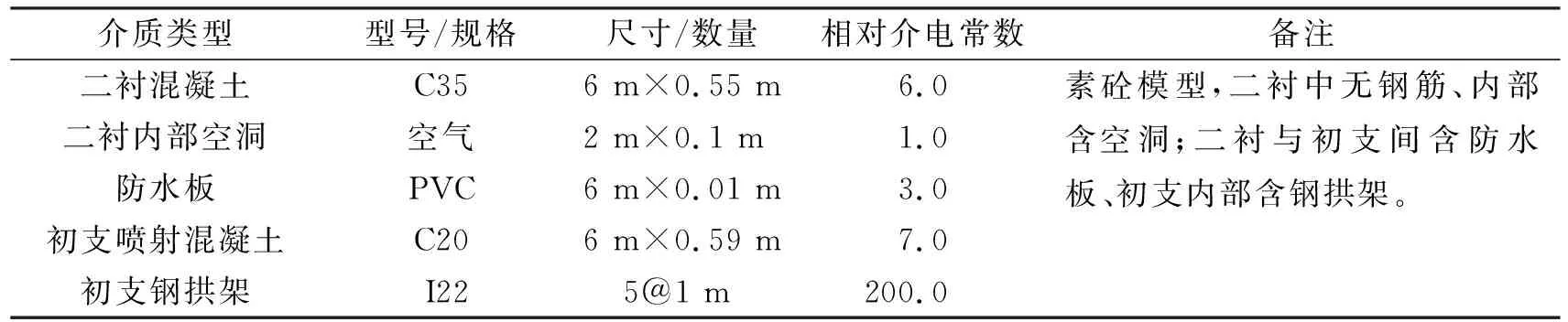
表1 隧道衬砌模型1主要参数

表2 隧道衬砌模型2主要参数
由表1和表2可以看出,模型2仅在模型1的基础上在二衬混凝土内部增设了双层二衬钢筋,其余参数设置均保持一致,模型2示意图如图2所示。
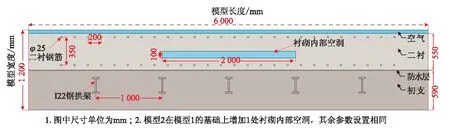
图2 模型2示意图Fig.2 Schematic diagram of model 2
4.2 探地雷达正演模拟
正演模拟软件为GprMax2D V2.0[21],根据衬砌检测常用参数,采用的天线中心频率f=900 MHz,采样时窗t=25 ns,道间距dx=0.012 5 m。模型尺寸为(长度×宽度)为6 m×1.2 m,模拟网格Δx=Δy=0.002 5 m。总道数为460道,模拟的雷达测线长度为5.75 m。吸收边界采用10层PML(Perfectly Matched Layer)网格厚度,激励源选用雷克子波。经克希霍夫积分偏移归位预处理后的模型1正演雷达剖面如图3所示。
图3经预处理后的模型1正演雷达剖面显示:在双程走时2 ns处出现一个反射能量较强的水平连续同相轴,该同相轴贯穿整个雷达剖面,代表模型中的衬砌表面位置;随后在双程走时6 ns处,剖面长度2~4 m范围出现第二个强反射能量水平连续同相轴(图3中虚线框内部分),且该同相轴极性与入射波相同,空间位置与模型2中预设空洞位置一致;接着在双程走时10 ns处出现第三条水平同相轴,该同相轴能量较弱,同相轴极性与入射波相同,推断为初支与二衬间的界面反射,但该同相轴在剖面长度2~4 m范围内出现错断,错断部分同相轴整体往剖面上部提升,双程走时减小到9 ns,这是因为在剖面长度2~4 m范围内,雷达波先穿过了预设空洞(在双程走时6 ns处)再到达初支与二衬的界面,由于雷达波在空洞内空气中传播时,波速约为混凝土中电磁波速的3倍,所以最终导致在剖面长度2~4 m范围内初支与二衬界面的双程走时变小,对应的反射同相轴形成错断并抬升;最后,在剖面长度1 m、2 m、3 m、4 m、5 m位置,双程走时11 ns、15 ns处,分别出现5个扁平的短柱状强反射同相轴和5个点状强反射(其中,剖面长度2 m、3 m、4 m位置同相轴受双程走时6 ns处预设空洞影响,出现一定程度畸变与抬升),双程走时11 ns处反射波极性与入射波相反,空间位置与预设的钢拱架顶面一致,双程走时15 ns处反射波极性与入射波相同,空间位置与预设的钢拱架底面一致。图3中钢架及空洞边缘未出现弧形绕射波,这是因为已经做过偏移归位处理。

图3 经预处理后的模型1正演雷达剖面Fig.3 The forward GPR profile of model 1 after preprocessing
通过对图3经预处理后的模型1正演雷达剖面分析可知:在无钢筋情况下,二衬与初支界面、空洞及初支钢架特征是清晰且容易识别的。
为研究钢筋混凝土衬砌中的空洞缺陷特征,采用相同的参数对二衬内含有双层钢筋的模型2进行了地质雷达正演,正演结果见图4的模型2正演雷达剖面。
由图4可知:雷达剖面上部(双程走时2~5 ns范围)钢筋的双曲线特征非常明显,但由于钢筋的水平间距较小,相邻钢筋的回波可能同时到达探地雷达天线并产生混叠现象,在探地雷达回波图的下部形成了纵横交错的网状结构图。对比图3、图4可知:虚线框部分为空洞回波,但由于受到钢筋回波信号的干扰,图4中空洞回波中间水平部分同相轴断裂,被分割为多个离散部分,同时离散部分的形状也不再呈现水平,空洞回波特征已经完全畸变,无法从原始的钢筋砼衬砌雷达检测剖面中准确识别出空洞的位置及规模。此外,初支钢架的弧形反射特征也已基本湮没在钢筋回波的多次反射中,无法识别。

图4 模型2正演雷达剖面Fig.4 The forward GPR profile of model 2
4.3 道平均处理
通过道平均技术来抑制钢筋干扰时,滑动窗口宽度的选取直接关系到道平均处理的效果。窗口宽度过大,则容易造成虚假异常;窗口宽度过小,则处理效果不太理想,达不到抑制钢筋干扰、增强空洞同相轴连续性的作用。前期大量数值模拟试验显示:随着滑动窗口的增大,异常的边界在水平方向由中心位置往外扩展越多,即发生水平偏移越明显,这也是滑动窗口选取不宜过大的原因之一。虽然道平均会使异常在水平方向产生一定偏移,但异常的中心位置可认为是不变的。当滑动窗口选取合适时,其水平偏移在一定范围内是可接受的。此外,通过对正演及实测雷达衬砌检测数据对比分析可知:钢筋的弧形反射能量主要影响范围在2倍钢筋间距内,因此滑动窗口的宽度应尽量不超过2倍钢筋间距,实际处理过程中,应在多次试验后确定窗口道数的取值,滑动窗口空间上的实际宽度由雷达记录道数乘以道间距来确定。对图4模型2正演雷达剖面进行道平均处理,模型中钢筋间距为0.2 m,雷达记录道间距为0.012 5 m,按照滑动窗口的宽度不超过2倍钢筋间距的原则,本例中滑动窗口的宽度应小于32道,经过试验最终选定滑动窗口宽度为30道,结果如图5所示。
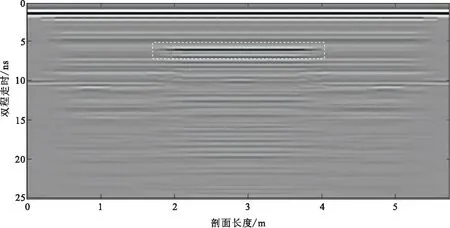
图5 经道平均处理后的模型2正演雷达剖面Fig.5 The forward GPR profile of model 2 after trace stacking
由图5可知:经过道平均处理后,钢筋及钢拱架回波中双曲线两翼相位差较大部分的回波被滤除,只保留了钢筋及钢拱架双曲回波顶点水平部分回波。由于钢筋分布密集,所以在探地雷达回波图中近似呈现为水平同相轴特征,同时下部网状的多个钢筋混叠回波信号基本被抑制;图5中虚线框内信号是处理后的空洞病害回波信号,其水平部分得到明显增强,消除了原始正演剖面中的断裂和“蝙蝠”状回波。对比图3、图5可知,经过道平均处理后,钢筋砼衬砌空洞病害回波特征已基本与素砼衬砌空洞病害回波一致,说明将道平均技术运用于钢筋砼衬砌空洞病害的识别是有效的。
5 实例分析
为查明某在建高铁隧道钢筋砼衬砌内部的空洞,采用美国GSSI SIR4000型探地雷达,配属400 MHz天线进行了检测,测线沿隧道右拱腰起拱线位置纵向布置,测线长度为11 m,时窗大小设定为30 ns,测量模式为时间测量,归一化后道间距为0.012 5 m。为了方便对探地雷达数据做进一步处理,通过Matlab编程实现了GSSI SIR4000型探地雷达数据的读取与显示,图6为基于Matlab的SIR4000型探地雷达实测剖面。
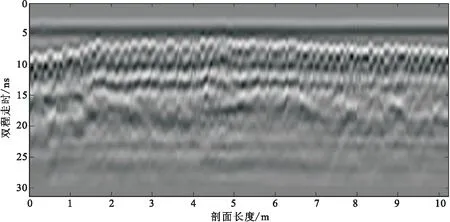
图6 探地雷达实测剖面Fig.6 Measured profile of GPR
图6显示:在探地雷达剖面中,双程走时为5~9 ns范围内钢筋的双曲线特征非常明显,但由于二衬内部环向钢筋的设计水平间距仅为0.2 m,使得相邻钢筋的回波间产生了明显的混叠现象,从而在探地雷达剖面双程走时为9~15 ns范围内形成了纵横交错的网状结构图,导致无法从实测雷达剖面中提取空洞病害特征。为抑制钢筋回波对空洞病害识别的干扰,对图6中的探地雷达数据进行了道平均处理,滑动窗口宽度设为30道,处理结果见图7。

图7 图6经道平均处理后结果Fig.7 Results of fig.6 processed by trace stacking
经道平均处理后,图7中的钢筋回波信号得到明显抑制,图中虚线框内出现一条与入射波极性相同的强反射同相轴,其信号特征与模型1素混凝土衬砌中预设的空洞缺陷雷达波特征基本一致,由此推断在剖面长度1.3~6.7 m,双程走时11~13 ns范围内存在一处空洞病害。经过零点校正及时深转换后计算出该处空洞脱空量约10 cm,空洞距二衬表面的最小厚度为48 cm(二衬设计厚度为55 cm),二衬厚度最小值位于剖面长度4.4 m处。为验证检测结果,现场在推断最小厚度处进行钻孔及孔内电视验证,验证结果显示:当钻进深度达到48 cm时钻头突进,随即改用孔内电视探测后见空洞及初支防水板,孔内电视验证结果见图8,尺量二衬厚度为48 cm,脱空量为10 cm,推断结果与验证情况一致。

图8 孔内电视验证结果Fig.8 Test results of TV in hole
6 结 论
1)利用道平均技术可抑制钢筋的弧形反射,同时增强近水平状空洞缺陷反射信号的连续性,有助于对钢筋砼内部空洞缺陷的识别;滑动窗口宽度的选取直接关系到道平均处理的效果,由于钢筋的弧形反射能量主要影响范围在2倍钢筋间距内,因此滑动窗口的宽度应尽量不超过2倍钢筋间距;当滑动窗口选取过大时,会导致异常的边界在水平方向由中心位置往外扩展,即发生水平偏移现象,所以在实际处理过程中,应在多次试验后确定窗口道数的最优取值。
2)探地雷达正演模拟有助于对目标体的波场特征进行分析,基于Matlab的探地雷达数据读取可实现对探地雷达数据做更深入的分析与处理,本文仅对二维近水平状空洞模型进行研究,要进一步分析钢筋砼衬砌内脱空缺陷的空间形态特征,三维探地雷达正演研究是下一步的工作方向。