分段真空激光准直测坝变形系统
2022-10-24王洪洋李俊富
王洪洋,李俊富
(1.中水东北勘测设计研究有限责任公司,吉林 长春 130061;2.水利部寒区工程技术研究中心,吉林 长春 130061)
目前,直线坝水平位移观测方法包括真空激光准直测坝变形系统、大气激光准测坝变形系统、视准线法、垂线法、引张线法、交会法、极坐标法、GNSS系统观测法等。其中,垂线法、交会法、极坐标法、GNSS系统观测法可以观测拱坝位移,但交会法、极坐标法难以实现自动化;垂线法受布置数量约束,观测数量有限;GNSS系统观测法受气候条件影响大,观测精度低。为了实现拱坝或折线型水工建筑物水平及垂直位移自动监测,本文将基于真空激光准直测坝变形系统的原理对分段真空激光准直测坝变形系统进行研究。
1 激光准直
激光准直测量技术按测量原理可分为激光束准直和波带板激光准直两类。激光束准直法通过望远镜系统发射出激光束,利用激光束的直线性,在需要准直的观测点上用光电探测器或接收幕后面的CCD摄像机接收,利用能量中心法计算出光斑在成像屏上的像素坐标,常用于施工机械导向的自动化和变形观测。波带板激光准直是利用激光的干涉原理,激光只作为点光源,而不作为准直线,采用三点准直方法,避免了对激光束高稳定性的要求。该系统由激光器点源、波带板装置和光电探测器或自动数码显示器三部分组成,主要用于长距离高精度准直测量,如长距离基准线测量、直线加速器安装测量、大坝变形监测等。
2 真空激光准直测坝变形系统
真空激光准直测坝变形系统技术已非常成熟,并成功应用于国内多个大型水利水电工程。但其是准直系统,只适用于直线型水工建筑物,在拱坝等非直线型水工建筑物中无法应用。近年来,国内又连续建成了多个高拱坝,但其观测方法仍没有大的革新。为了实现自动监测拱坝水平位移,采用激光束准直、双小孔激光定位、CCD摄像机光斑捕捉和能量中心计算等技术,组成分段真空激光准直测坝变形系统。该系统由发射端控制设备、真空管道、测点控制设备、接收端控制设备、真空控制设备及测控单元等部分组成。
3 分段式真空激光准直系统
分段真空激光准直测坝变形系统是根据水工建筑物的结构形状将多条真空激光准直测坝变形系统进行分段连接,最终形成一个完整的变形测量系统。每段系统由1个发射端、1个接收端和激光传输管道组成。传输管道与测点采用波纹管连接,波纹管的作用是消除温度引起的伸缩变形,保证测点位移不受传输管道约束。发射端由激光管、双小孔定位装置组成;激光管发出的激光束经过双小孔射向接收端;接收端由接收幕、采集摄像机组成,接收幕的作用是使发射端激光管发出的激光束成像在屏幕上,采集摄像机的作用是采集屏幕上的像点坐标。具体布置是第一段激光发射端独立布置在发射平台上,第一段激光接收端与第二段激光发射端布置在同一观测平台上,第二段激光接收端与第三段激光发射端布置在同一观测平台上,依此类推,最末段激光接收端独立布置在接收平台上。
4 位移计算
试验共布置3段(4个测点),测点布置信息如图1所示。假设1号测点不动,当2号测点沿AB线移动到X2i时,在2号测点处测到X1-2i,同时在3号测点处测到X2-3i,则有:X1-2i=X2icos(α1);X2-3i=X2icos(α2)。
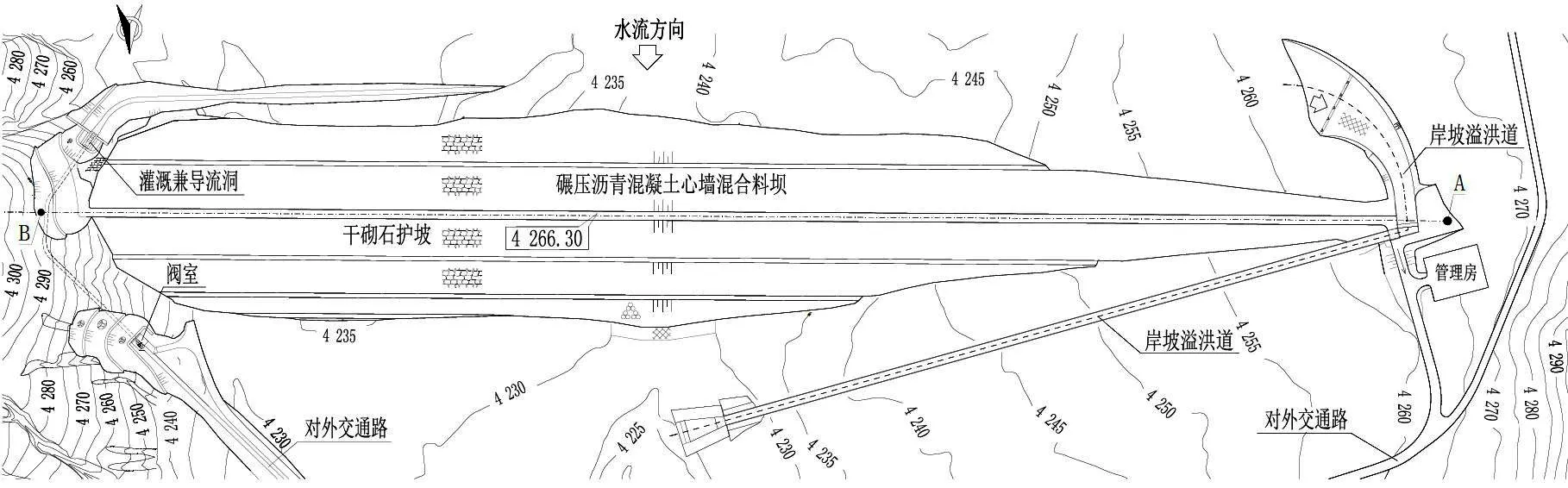
图1 康卓水库工程枢纽布置图

图1 测点布置图
规范SL 601-2013《混凝土坝安全监测技术规范》中5.1.3项变形监测准确度规定,拱坝坝体径向位移量中误差限制值为±2.0 mm,在±50.0 mm的量程内控制误差在0.5 mm,则50.0 mm/cos(8.08°)=50.5 mm,即α角度控制为8.08°,只要角度小于8°,即可以认为X2i≈X1-2i,X2i≈X2-3i。在实际工程中α角远小于8°。
5 数据精度分析
5.1 精度计算
试验布置3段(4个测点),在给定某点固定位移值后对该系统所有测点分别观测4测回,共计16次读数,分别计算自由状态及不同位移情况的重复精度。观测值重复精度计算公式:

式中:m是重复观测精度,mm;Xi—第i次观测值,mm;是观测值平均值,mm;△是观测值与观测值平均值的差值,mm;n观测次数。
此次试验共进行了4组观测,观测误差见表1。

表1 观测误差表mm
从表1中可以看出,最大重复误差为±0.011 mm。
5.2 误差计算
通过给定某点水平位移值后,观测得到的闭合差按照距离进行平差后,得到相应平台(测点)的位移值,并计算出位移值中误差。
闭合差计算:

改正数计算:

位移值计算:

式中:ω是闭合差,mm;△i是第i次观测值与初始值之差,mm;Xi——第i次观测值,mm;X初是观测值初始值,mm;Si是第i段距离,m;Vi是第i点改正数,mm;δi是第i点位移值,mm。具体试验数据见表2。
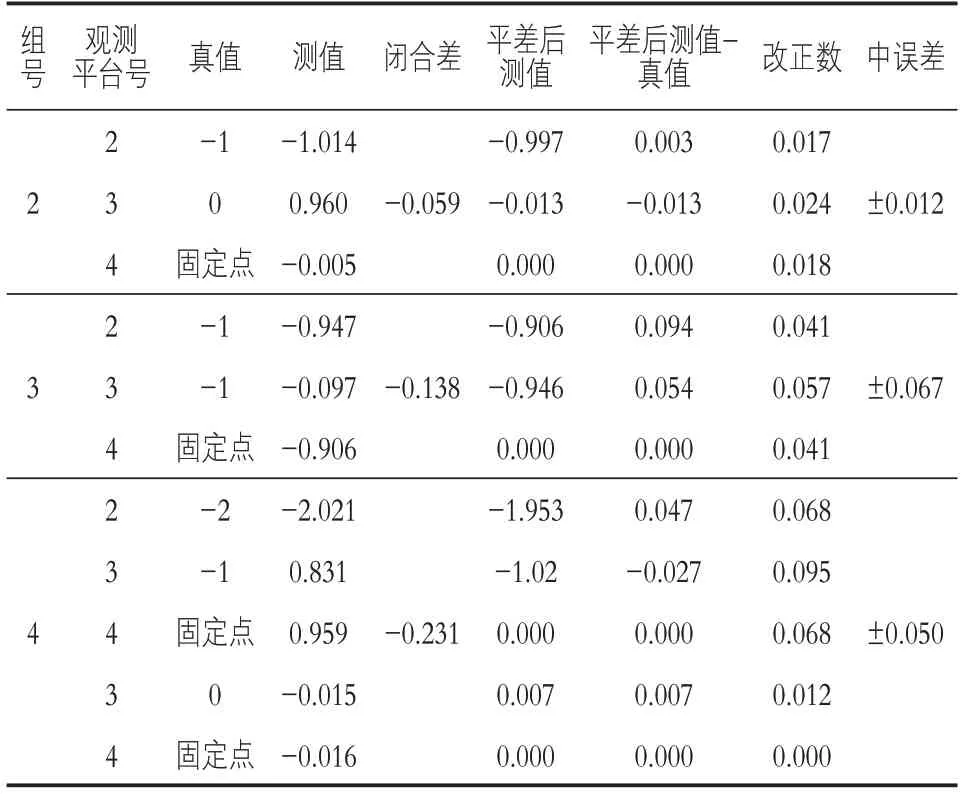
表2 位移试验误差表mm
从表2可以看出,通过观测给定测点不同位移,平差计算得出每次最大位移的误差值为±0.067 mm。
6 结论
1)此次试验观测值最大重复误差为±0.01 mm,说明此次观测值可信。试验中位移中误差最大值为±0.067 mm,是按照距离进行平差计算的,现场最长段距离9.33 m。实际工程中拱坝每个坝段长度在20 m左右,按照距离比例进行放大,位移中误差最大值小于±0.2 mm,其观测精度与真空激光准直测坝变形系统基本一致。
2)观测成果通过闭合差计算,按照距离进行改正,消除了观测中系统误差。
7 结语
分段真空激光准直测坝变形系统成功解决了拱坝或折线型水工建筑物水平及垂直位移自动化监测的难题,为工程安全监测提供了一种自动化监测手段,提高了工程安全监测的技术水平。
