基于模糊控制的除草机器人自主导航系统研究
2022-10-23翁盛槟吴继团林晓亮温涛铭
翁盛槟,吴继团,林晓亮,温涛铭
(衢州学院a. 工程实训中心; b. 机械工程学院,浙江 衢州 324000)
0 引言
得益于自动导航、机器视觉、集成电路等技术的快速发展,除草机器人作为机器人学的分支,正逐渐代替传统的人工除草作业[1],特别是在花园、足球场等具有规则形状草坪的修理维护上,除草机器人能依靠自身的智能控制系统,自动感知外界环境信息,作出全覆盖的路径规划,进行自主导航,全程无需人工干预,极大地提高了除草效率,减少传统人工作业的劳动强度。
目前,针对除草机器人的智能定位导航方式有很多种,如惯性导航、磁导航、卫星导航、光反射导航、机器视觉导航等[2-3]。针对不同的除草环境,应用的导航技术也不尽相同。例如惯性导航方式是最普遍使用的一种导航技术,它利用除草机器人自身所装配的光电编码器来测量除草作业移动的距离及方向[4]。但该导航方式仅仅依靠当前的位置方向来生成下一步的控制指令,会产生累积误差,容易使除草机器人在原有的路径规划上产生轨迹偏差。卫星导航则需要借助GPS、北斗等导航系统进行定位,为增加定位精度,往往还需要通过地面基站进行定位信息交互,无法及时获取实时的定位坐标,具有一定的延时误差[5]。光反射导航定位系统主要是利用激光或者红外线技术进行定位,通过激光构成路标,由除草机器人上的光电接收器检测激光信号,确认当前位置,从而进行导航控制。机器视觉导航方式是通过机器视觉技术分析除草机器人前方画面的图像信息,从而判断自身移动的误差和及时规划后续的移动路径[6-7]。针对机器人移动方式的路径规划,主要有随机式、螺旋式及往返式[8]。其中,随机式路径规划通过反复的随机移动把整个作业区域完全覆盖。该方式控制简单且具有灵活的避障能力,但在实现区域完全覆盖的情况下,路径的重复率较高,对于除草机器人的实际应用具有高耗时、高耗能的缺点。螺旋式路径规划分为外螺旋式和内螺旋式,顾名思义是让除草机器人按照“回”字形的轨迹从外逐渐往中心移动,或者从中心逐渐往边界移动,该方式在移动的过程中机器人需要频繁地转向,且规划的总路径较长。往返式路径规划与犁田类似,如图1所示,是指除草机器人从起点开始按照某一具体方向沿直线移动,通过往返式的移动路径,直到把整个作业区域完全覆盖。
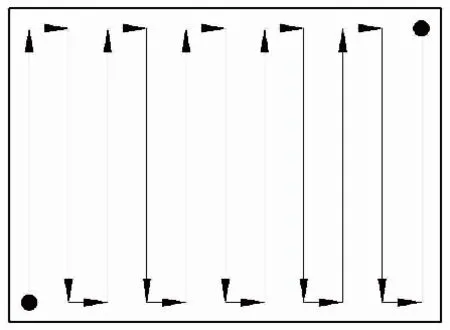
图1 往返式路径规划图
本文结合现有定位导航技术及全覆盖路径规划方式,根据除草机器人的实际应用特点,采用机器视觉导航技术与往返式路径规划对除草机器人展开研究,探讨如何提高除草机器人的除草效率及移动精度。
1 除草机器人结构
除草机器人主要应用于较为平坦的草坪上进行除草作业,但草坪上一般具有大小不一的凹坑及石子,容易对机器人的行进路线产生影响,故所设计的除草机器人结构应具有一定的柔性结构,可对外界环境进行抑振,同时因为除草机器人在移动过程中遇到障碍物需要调整车身前进方向,所以在结构设计上需要综合考虑机器人的转向装置,图2所示为除草机器人的结构示意图。
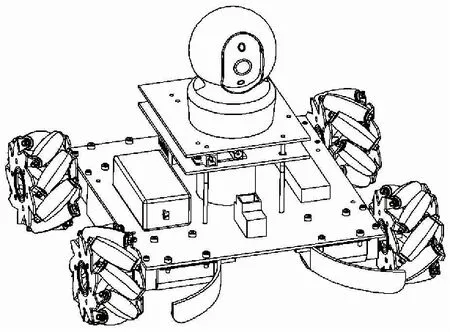
图2 除草机器人结构示意图
该除草机器人外形类似一般的移动式机器人小车,同时为了便于进行转向控制,车轮采用麦克纳姆轮结构,并采取四轮四驱的控制方式,通过控制各个麦克纳姆轮的驱动电机,可以精准调整除草机器人的运动方向,实现任意方向的移动。在除草结构上,设计一种蝶形的收拢板,称为“蝴蝶拢草槽”。该结构可收拢聚集机器人小车前方的杂草,然后由“拢草槽”内部的剪切装置对杂草进行切割,达到除草的目的。
2 自主导航定位原理
在除草机器人机械本体上,建立基于机器视觉的导航定位系统。其中机器视觉系统由除草机器人上布置的高像素相机和内部的图像采集卡组成。该视觉系统可为除草机器人提供车头前进方向的图像信息。机器人内部控制系统通过解析该图像信息可获取自身的位置方向,从而判断车头前进方向是否偏离原本的路径规划,然后计算出偏航的导航角与导航距,如图3所示,并及时规划后续的移动路径。
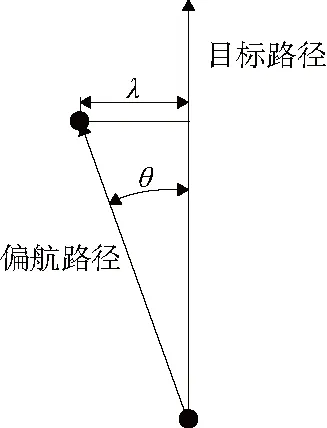
图3 闭环控制复检装置结构示意图
图3中:θ为导航角,表示除草机器人当前路径与原本规划路径之间的夹角;λ为导航距,表示除草机器人当前位置与原本规划路径的间距。
因为除草机器人采用四轮四驱的麦克纳姆轮结构,所以在识别出当前位置方向的偏差后,除草机器人的控制系统通过调整各个轮子的转速改变车子的移动方向,从而控制除草机器人的前进方向,保证整个除草作业的路径轨迹近似既有规划的往返式路径。
3 基于模糊控制的导航路径规划
因为导航角θ与导航距λ是随机误差,其值取决于外界环境草坪的实际情况,所以希望在导航角与导航距偏大的时候,能够及时调整除草机器人车轮的移动方向,即当导航角与导航距越大时,这个调整的物理量也越大。但是这种输入量与输出量在数值上没有精确的对应关系。这种模糊的控制方式与汽车驾驶行为类似。驾驶员在开车时总是不断地对前方的道路情况进行预判,然后通过调整方向盘对车辆行驶方向进行控制。这种人脑的模糊控制思维没有固定的数学模型,但是可以把外界不确定的影响因素推理出确定的输出量,从而对设备加以控制。基于上述模糊控制思维,针对除草机器人实际应用特点,本文在控制系统中引入模糊控制算法,模拟类似人脑决策的系统控制方式[9]。通过模糊算法规则对导航角与导航距进行分析,进而调整各个车轮的转向,实现除草机器人的自主导航功能[10],其模糊控制系统的原理框图如图4所示。
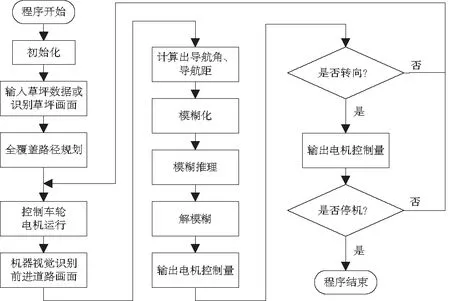
图4 模糊控制系统原理框图
由图4可知,模糊算法的输入为偏航路径的导航角与导航距,输出为电机控制量。设导航角误差的数值单位为°,其误差范围大致在[-20,20],则其基本论域为[-20,20],取导航角误差的量化因子为0.1,则导航角的模糊论域为[-2,2]。然后,对该范围进行模糊化,将其划分为5个等级,分别为{负大,负小,零,正小,正大},负数表示导航角在目标路径左侧,正数表示在右侧,符号表示为{NB,NS,ZO,PS,PB}。取常用的高斯隶属函数gaussmf表示,则在模糊论域中导航角关于模糊子集的隶属度如图5所示。同理,设导航距误差的数值单位为cm,其误差范围大致在[0,50],则其基本论域为[0,50],取量化因子也为0.1,则导航距的模糊论域为[0,5],同样将其模糊化划分为5个等级,符号表示为{ZO,PS,PM,PB,PP},以高斯隶属函数gaussmf表示,则在模糊论域中导航距关于模糊子集的隶属度如图6所示。因为模糊算法的输出值为除草机器人车轮电机的控制量,所以将该输出值作为一个相对比例系数,设其模糊论域为[-1,1],负数表示控制除草机器人车轮往右向调整,正数表示往左向调整,同样将其模糊化划分为7个等级,符号表示为{NB,NM,NS,ZO,PS,PM,PB},取高斯隶属函数gaussmf与三角形隶属函数trimf表示,则在模糊论域中电机控制量关于模糊子集的隶属度如图7所示。

图5 导航角在模糊子集上的隶属函数图
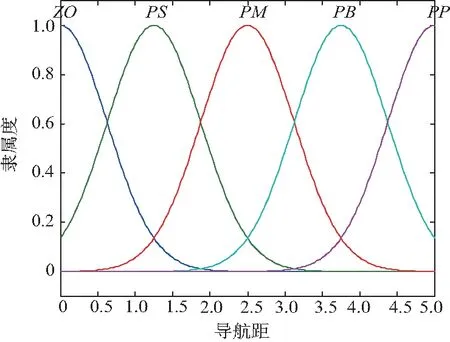
图6 导航距在模糊子集上的隶属函数图
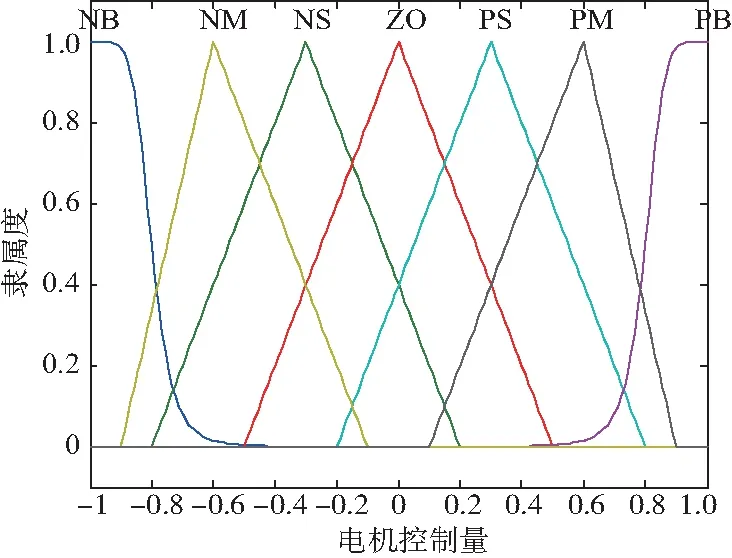
图7 电机控制量在模糊子集上的隶属函数图
在该模糊控制系统中,输入的导航角与导航距和输出的电机控制量在模糊子集上的隶属度由隶属函数图决定。除草机器人识别出路径偏差后,将导航角与导航距模糊化后,通过模糊算法的模糊控制规则推理出确定的电机控制量。通过上文对除草机器人移动路径的功能分析,根据实验经验,针对不同的导航角与导航距,建立电机控制量的模糊控制规则表,如表1所示。
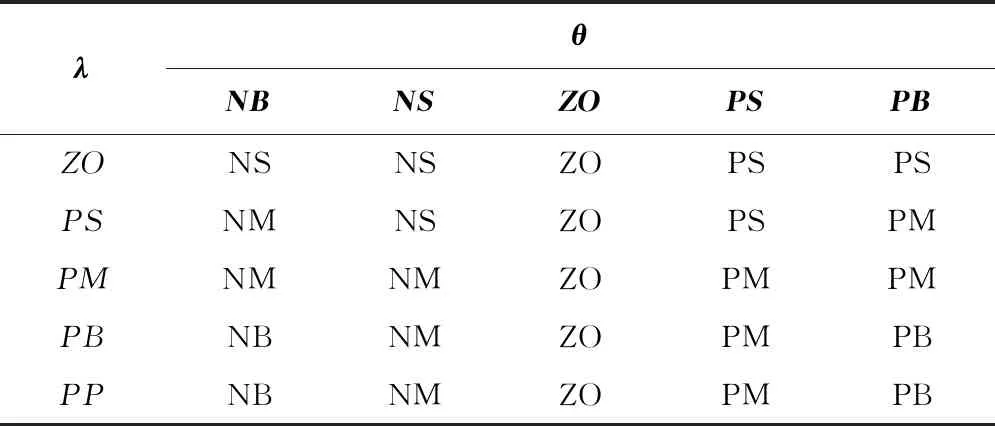
表1 电机控制量模糊控制规则表
在MATLAB软件的fuzzy工具箱中,选用Mamdani模糊推理算法和质心法(centroid)解模糊,将导航角、导航距、电机控制量的隶属函数及表1中的模糊控制规则表代入并进行模糊推理,其结果如图8所示。
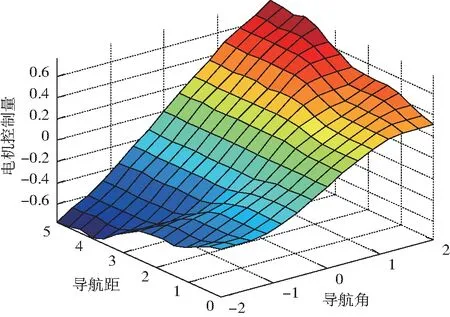
图8 MATLAB软件fuzzy工具箱电机控制量解模糊图
在图8中,输入当前除草机器人的导航角与导航距,通过模糊算法即可计算出电机控制量。设机器人小车以匀速移动,则电机控制量经过系数放大后,其物理意义表示为除草机器人移动速度的方向,对该移动速度进行运动学分析,如图9所示。
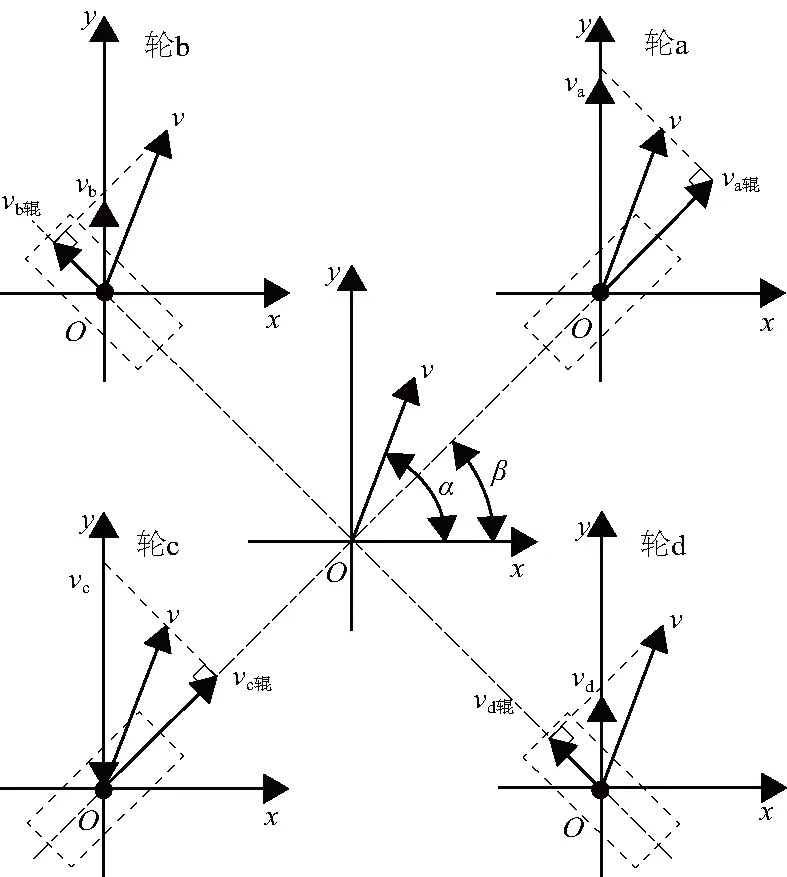
图9 除草机器人4车轮运动学分析图
图9中,为分析除草机器人的移动速度与各车轮转速的运动学关系,分别在小车底盘中心和各车轮轴中心建立直角坐标系。其中,va、vb、vc、vd分别为4个麦克纳姆轮的转速;va辊、vb辊、vc辊、vd辊分别为4个麦克纳姆轮上辊子的转速;α为除草机器人移动速度的方向与x轴的夹角;β为麦克纳姆轮上辊子的转轴与车轮转轴的夹角。
在图9中,以计算轮a转速为例,由图可得
va辊=vcos(α-β)
(1)
va辊=vasinβ
(2)
所以,由以上两式可得
vcos(α-β)=vasinβ
(3)
整理可求出va为
(4)
一般麦克纳姆轮上辊子的安装角度是确定的,取常用角度β=45°,则
va=v(sinα+cosα)
(5)
同理,可求出vb、vc、vd的转速,即通过电机控制量可确定除草机器人移动的速度方向,然后通过式(5)等计算出小车各个车轮的转速,再由控制器控制各个车轮的驱动电机,即可达到调整除草机器人移动方向的目的。
4 结语
本文设计了一种具有柔性机械结构的移动式除草机器人小车,通过采用四轮四驱的麦克纳姆轮车轮,实现除草机器人在除草作业中的灵活移动。同时针对除草机器人移动的实际误差,以提高除草机器人的除草效率及路径精度和降低能耗为目标,对除草机器人的控制系统展开研究,通过引入导航角、导航距概念,在机器视觉识别技术的基础上,建立了基于模糊控制算法的自主导航控制系统。实验表明:除草机器人通过模糊控制算法的智能调整后,可以适应较为复杂的外界环境变化,通过实时微调车轮转向,实现对既有路径的自主导航与动态调整。同时,本文的研究方法也可为其他自主导航运动机器人及路径规划方式提供技术借鉴。
