基于双锁相环的永磁同步电机转子初始位置估算方法
2022-10-21王艳阳米彦青
徐 萌,王艳阳,高 洁,米彦青
基于双锁相环的永磁同步电机转子初始位置估算方法
徐 萌1,王艳阳1,高 洁1,米彦青2
(1.中国民航大学电子信息与自动化学院,天津 300300;2.天津大学电气自动化与信息工程学院,天津 300072)
针对永磁同步电机(permanent magnetic synchronous motor, PMSM)无位置传感器控制中转子初始位置难以精确估算的问题,提出了一种基于注入变频方波电压的双锁相环结构转子位置估算的方案。首先对电机施加振幅相同方向相反的低频方波电压判别转子极性。然后提高方波电压频率至3 kHz,使用一种新型的双锁相环结构对转子位置估算值进行适应性误差补偿,以提高估算精度。最后保持高频信号注入进行电机空载、负载启动,全程无需中断和改变注入信号。实验表明,该方法对转子初始位置估算误差最大不超过3.73°,平均估算时间为0.18 s,估算过程中电机保持静止。当电机启动时,双锁相环结构比传统锁相环结构估算时间缩短18 ms,最大补偿角度为38.39°。估算过程未引入电机敏感参数,系统具有良好的稳定性和快速性。
永磁同步电机;信号注入法;转子初始位置;双锁相环;误差补偿;无位置传感器控制
0 引言
近年来,随着民航局节能减排工作的不断推进,机场特种车辆“油改电”进入全面推广阶段。永磁同步电机具有功率密度高、动态响应快、过载能力强和高效节能等优点[1],适用于机场低速平稳的特殊工况,广泛应用于机场电动牵引车、摆渡车等特种车辆的纯电力驱动系统[2]。永磁同步电机(permanent magnetic synchronous motor, PMSM)自身具有非线性和强耦合的特点[3],转子位置的准确辨识对PMSM的高性能控制至关重要,如果角度信息不准确则无法施加合适的磁场驱动转子,但是传统的机械位置传感器存在安装成本高和可靠性低等问题,因此无位置传感器控制逐渐成为PMSM的新型控制方式。文献[4]使用改进的滑模观测器进行转子位置跟踪,减少了参数估算误差,但此方法只适用于中高速阶段。反电动势较弱的零低速阶段,尤其是零速下的转子位置的准确估算是PMSM高性能控制的关键问题之一,精准的转子初始位置是电机成功启动的前提条件[5]。
目前,在无位置传感器控制中,转子初始位置角主要通过外加激励信号估算,由于PMSM的凸极特性,产生的响应电流会包含转子位置信息[6]。凸极性可以通过两种方式获得:一种是电机本身的凸极结构存在的凸极性[7],常见于内置式永磁同步电机;另一种是通过对表贴式永磁同步电机施加高频信号,人为地制造磁路饱和,产生的“饱和凸极性”使交直轴电感差异增大,凸极性较弱的电机也能进行转子位置估算[8-9]。
高频脉振电压注入法是将高频正弦电压注入到轴,采集轴高频响应电流并进行滤波处理后,使用锁相环(phase-locked loop, PLL)进行转子位置估算[10-11]。文献[12]对单锁相环的环路滤波器加装了非线性饱和度模块,提高了滤波性能和锁相精度。高频旋转电压注入法将高频正弦电压注入到轴,通过分离高频响应电流的正负序分量提取转子位置角[13-14],但是基于高频正弦信号注入的角度解调算法较为复杂,而且滤波器的存在会带来时延,动态响应较慢。高频方波信号调制简单,在信号解调过程中无需过多的滤波[15],在很大程度上简化了信号处理流程。文献[16]使用高频方波注入法进行转子初始位置估算,并且对轴电感变化引起的误差进行补偿。文献[17]提出了一种无滤波器的锁相环解耦转子初始位置的方法,最大估算误差为7.6°。文献[18]通过正交锁相环对逆变器等非线性误差进行补偿,提高了估算的准确性,但是未考虑锁相环本身带来的时间延迟。文献[19]提出了一种软锁相环结构准确获得电机转速和转子角度信息,但依赖反电动势进行计算。在以上方法中,依然存在时延带来的转子位置估算不准确的问题。
此外,由于PMSM转子结构的对称性,在对转子位置估算完成后还需要进行极性判断[20],通常通过注入正负电压信号[21]后测量轴的响应电流幅值或分析二次谐波[22-23]进行极性判断,但这些方法会带来注入信号中断和改变注入信号类型的问题,给信号调制带来困难,增加了转子初始位置估算和启动的时间。
针对转子位置估算不准确和极性判断复杂的问题,本文提出了一种连续信号注入,使用双锁相环(double phase-locked loop, DPLL)结构估算转子初始位置的方法。首先向PMSM注入低频的方波信号进行极性判断,然后提高注入方波电压的频率,使用一种新型的双锁相环结构,将PLL的输出与相电流进行二次锁相,对滤波器等环节引起的时延进行相位补偿,结合极性判断结果给出精确的转子初始位置值,最后保持方波电压注入对电机进行空载、负载启动。仿真实验和电机硬件实验证明了转子位置估算精度的改善和估算时间的缩短,验证了方法的可行性。
1 高频方波注入的转子初始位置估算
1.1 高频方波注入下PMSM数学模型
建立永磁同步电机坐标系如图1所示。
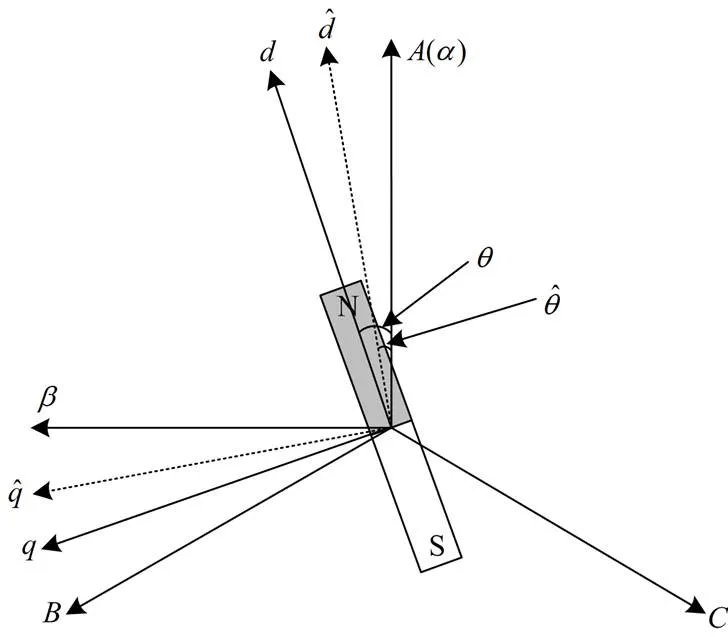
图1 永磁同步电机坐标系示意图

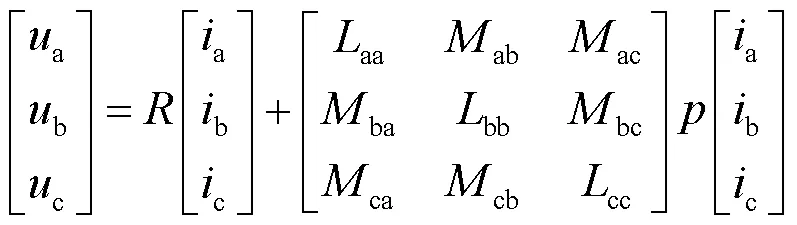
PMSM在三相坐标系下的电压方程为
式(1)在坐标系下可写为

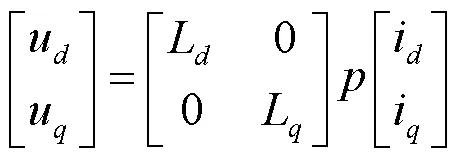
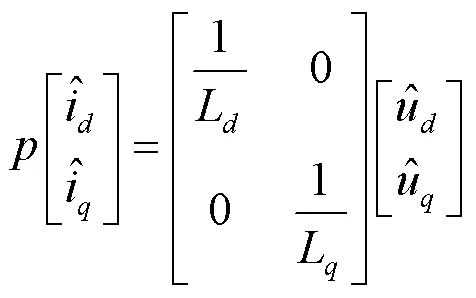

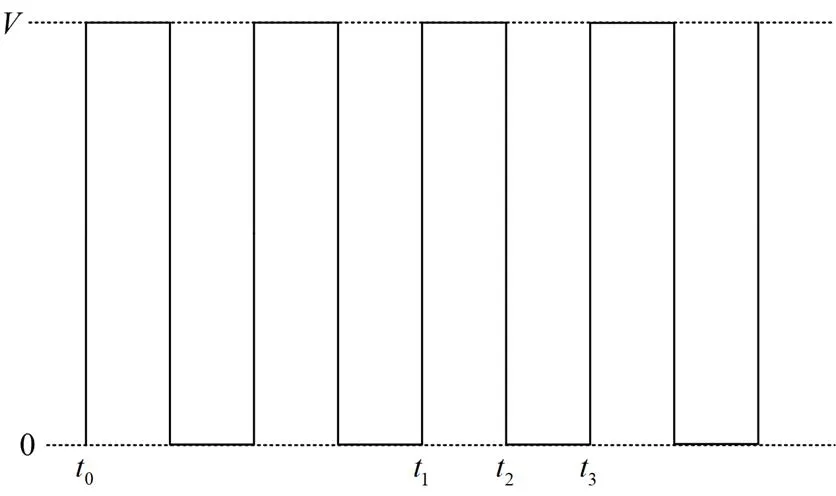
图2 高频方波信号示意图
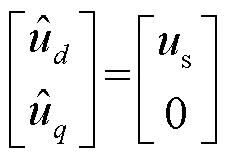
其中电压表示为
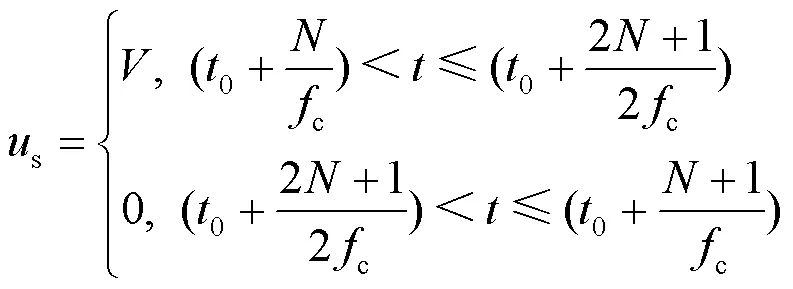
高频方波信号的注入形式为
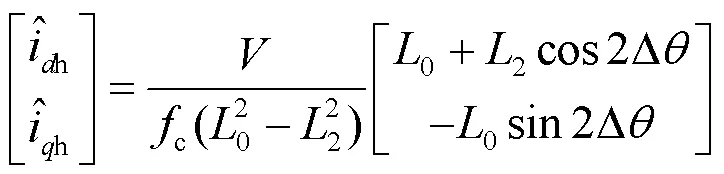
1.2 转子位置估算


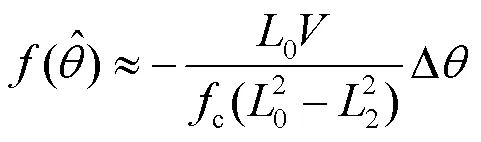
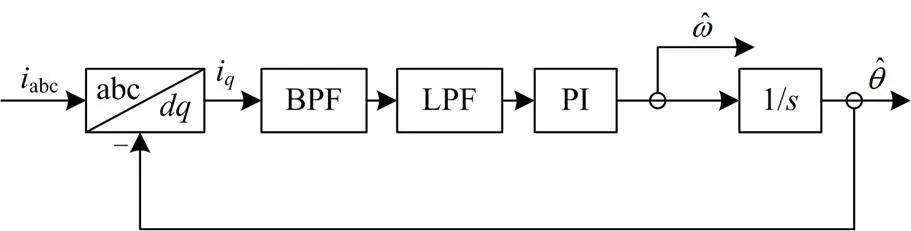
图3 锁相环结构图
2 变频信号注入下的转子位置估算策略
2.1 双锁相环误差补偿结构
锁相环的滤波器环节会不可避免地带来时延,转子角度估算值滞后于相电流相位,在估算过程中造成误差。为了减小这一影响,本文提出了一种双锁相环结构,将PLL输出的估算角度与相电流重构,二次锁相得到角度误差补偿。

式中,。重构后的信号与误差补偿电流同相位。

2.寒山诗的文化特征:寒山诗融合了中国儒释道多重文化,思想深刻、内容丰富。著名学者钱学烈指出,寒山诗熔铸了儒、道、释三大哲学体系,是作者百余年生活经历的真实记录,也是他由儒入道,由道入佛,由佛入禅,这一新路历程的形象反映。她把寒山诗分为自叙诗、风俗诗、隐逸诗和禅佛诗,并认为自叙诗和风俗诗,大都打上了儒家思想的烙印;隐逸诗则浸润老庄,颇俱仙风道骨,是艺术水平最高者;禅佛诗为释家禅林称道,至有“诗僧”之名。[7]
双锁相环误差补偿结构框图如图5所示。
2.2 变频信号注入策略
转子位置角估算完成后,由于转子结构的对称性,还需要进行转子极性判断。如图6所示,由于流过绕组的电流与转子磁场同向时具有增磁作用,PMSM工作点会发生移动,因此采用正反两个方向的直流电压矢量注入PMSM,测量并比较瞬态响应电流峰值,当电压与轴同向时,电流幅值较大,因此可以判断转子极性。
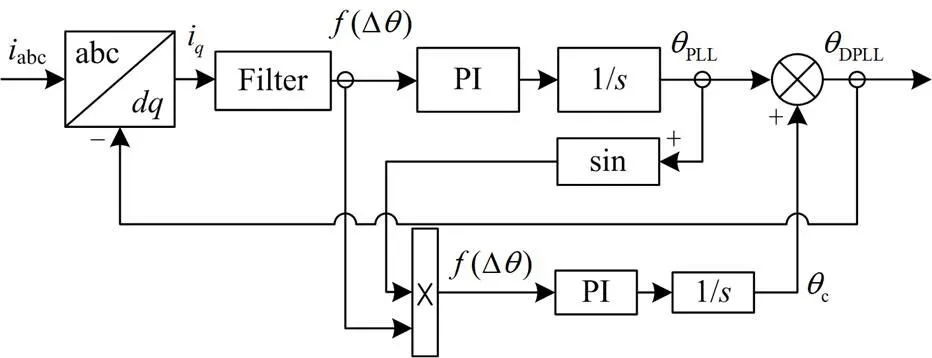
图5 双锁相环误差补偿结构图
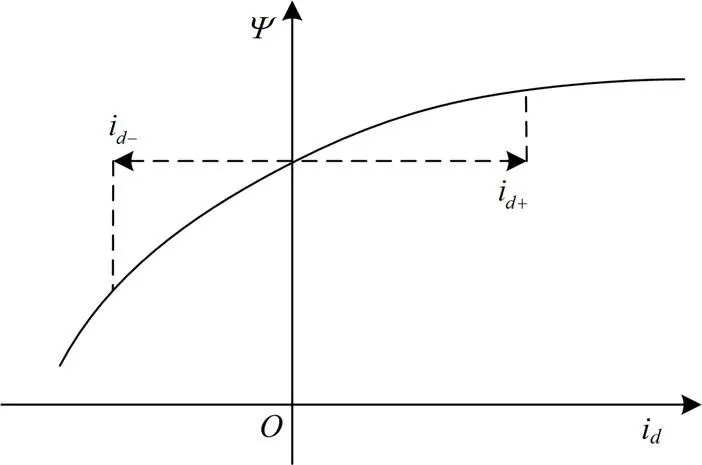
图6 d轴磁饱和特性曲线
但是上述流程需要在高频电压注入后额外注入一次不同的电压信号,这种位置检测流程有两个缺点:1) 注入信号需要中断和更换类型;2) 高频信号对永磁体的增磁作用可能影响极性判别信号的响应,造成辨别失败。
本文使用变频率信号注入,并对转子初始位置判断流程进行改进,首先使用低频方波电压进行转子的极性判断,再提高注入信号的频率至3 kHz进行转子位置的辨识,这种注入策略无需中断注入信号,也不会引入噪声干扰。变频方波电压时序图如图7所示。
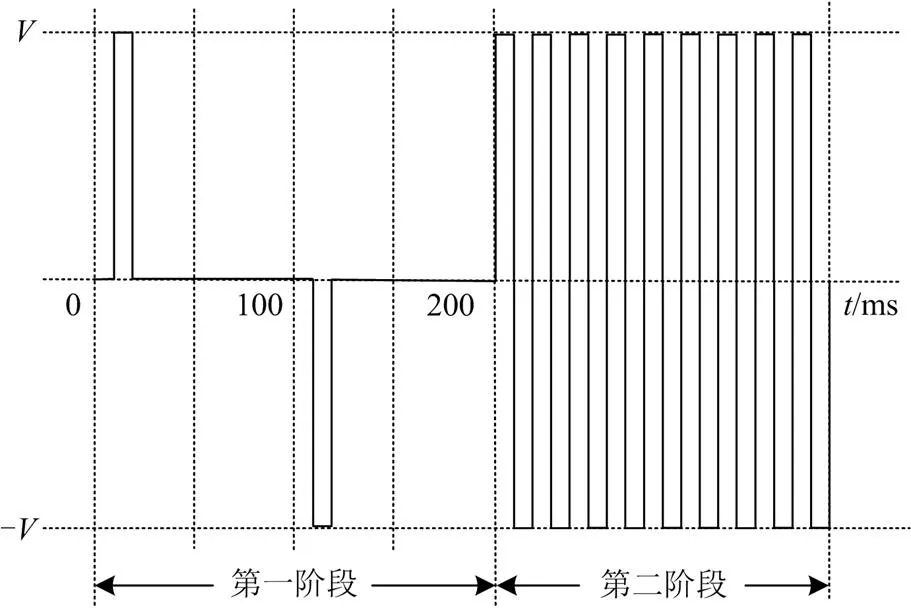
图7 变频方波电压时序图
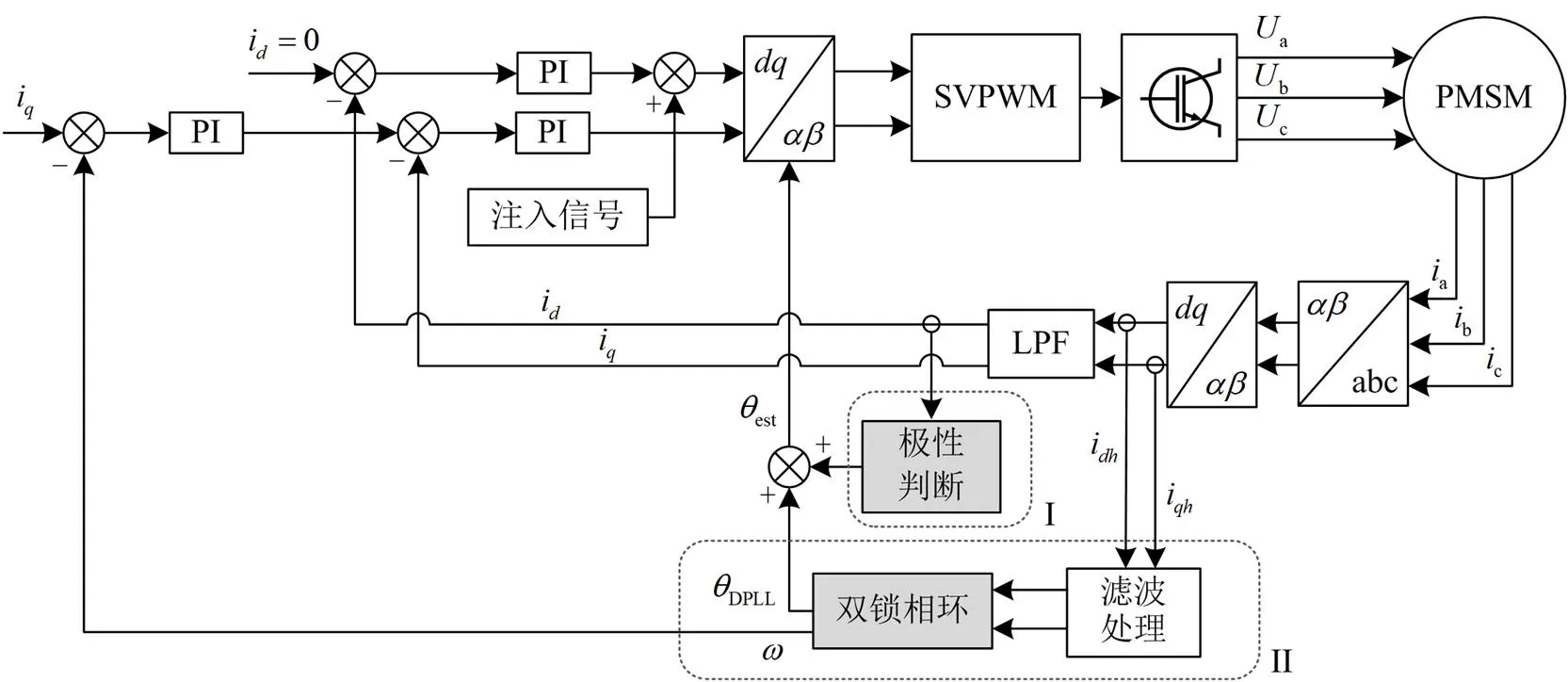
图8 转子位置估算系统框图
3 仿真与实验分析
为了验证本文提出方法的效果,对一台内置式永磁同步电机建立仿真模型进行实验,参数如表1所示。
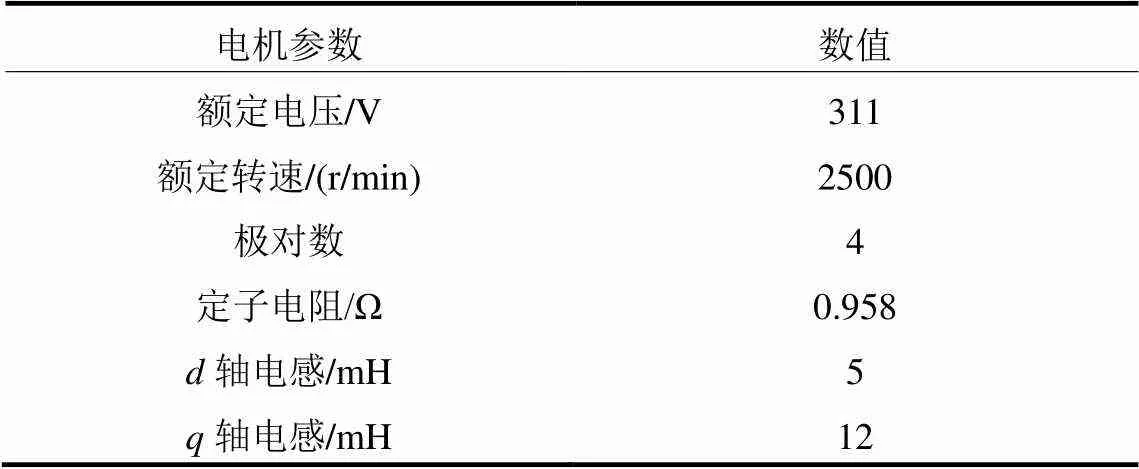
表1 永磁同步电机参数
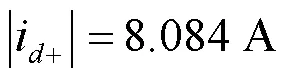
给定转速为0,即静止状态下,注入幅值为80 V、时序如图7所示的变频方波电压进行极性判断和转子初始位置估算,仿真时间为0.5 s。
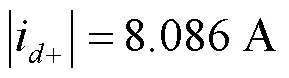
设定转子初始角度为207°(27°+180°),估算过程如图11所示。
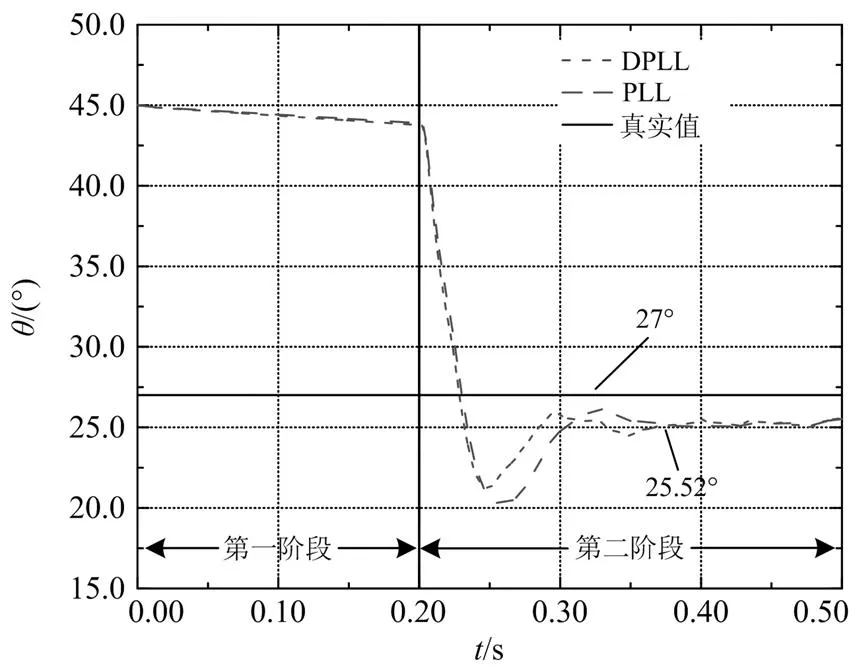
图9 转子初始角度27°时的估算过程
两次计算过程中,DPLL估算过程的电机转速波形如图12所示,在估算过程中基本保持了静止,转子初始位置估算值有效,对电机的平稳启动不会造成影响。
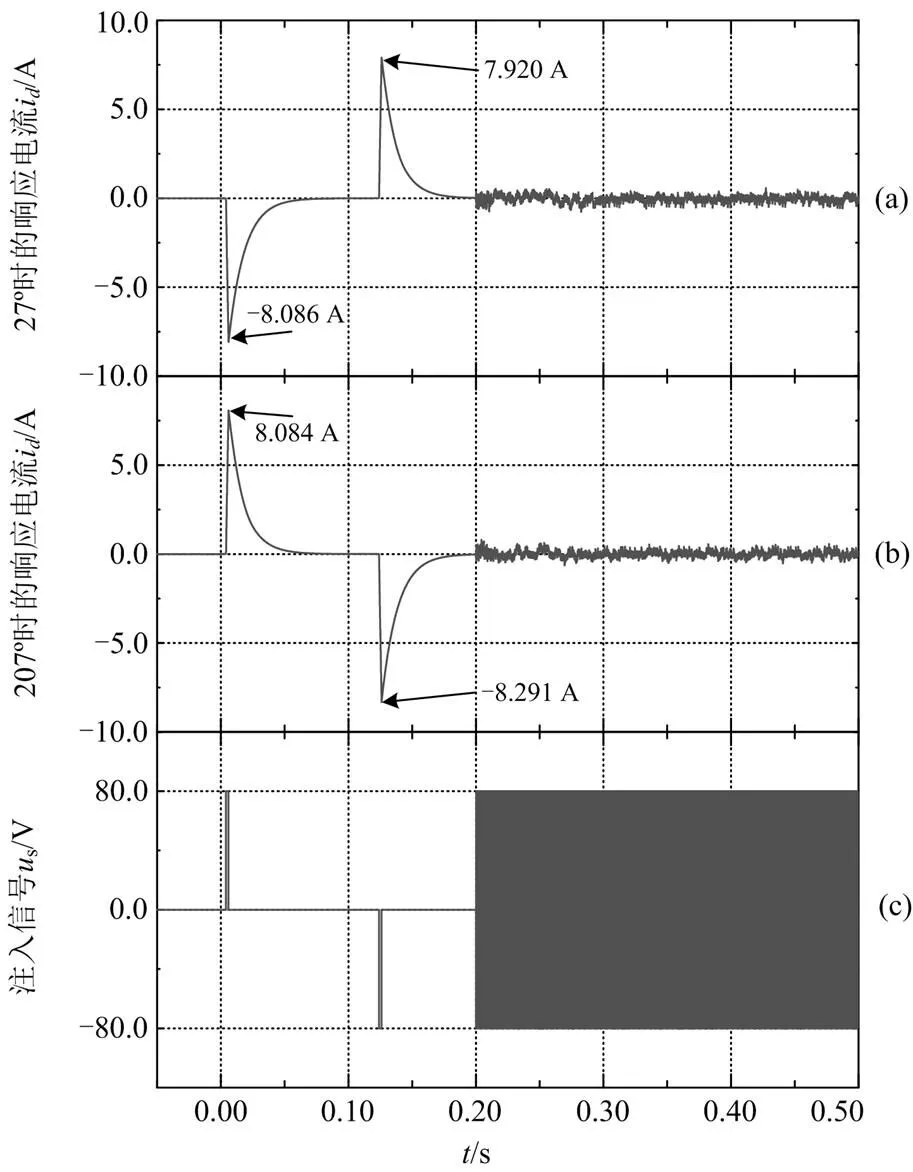
图10 极性判断及注入信号变化过程
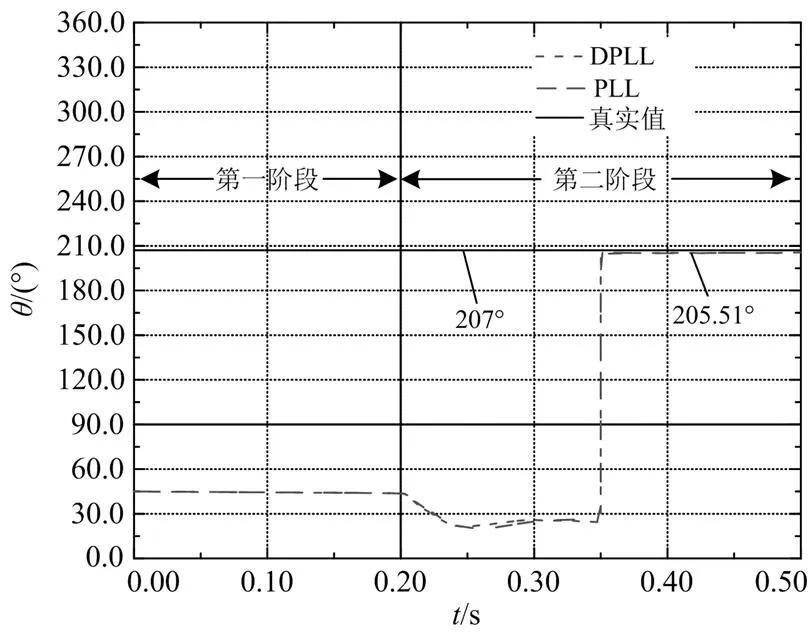
图11 转子初始角度207°时的估算过程
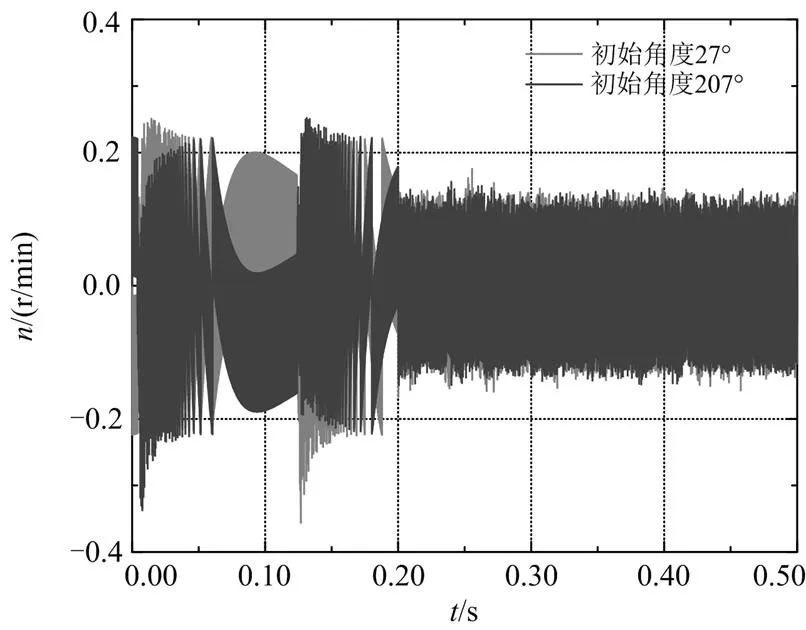
图12 双锁相环估算过程中电机转速波形
图13为0°~360°的全范围转子位置估算结果,平均估算时间(不含极性判断)0.18 s。估算误差如图14所示,估算误差最大不超过3.73°。转子初始位置估算过程中电机保持静止状态。
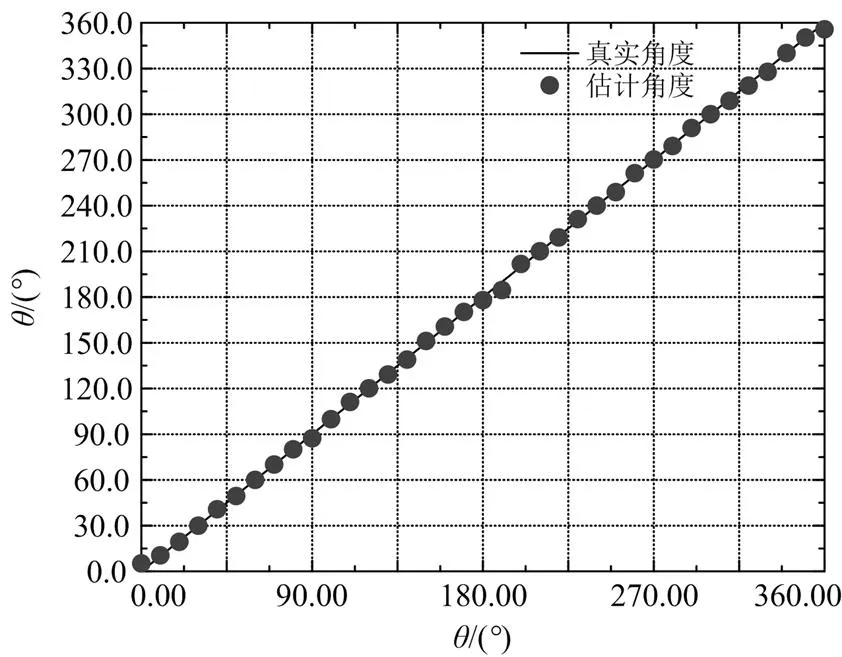
图13 双锁相环对不同转子初始位置的估算结果
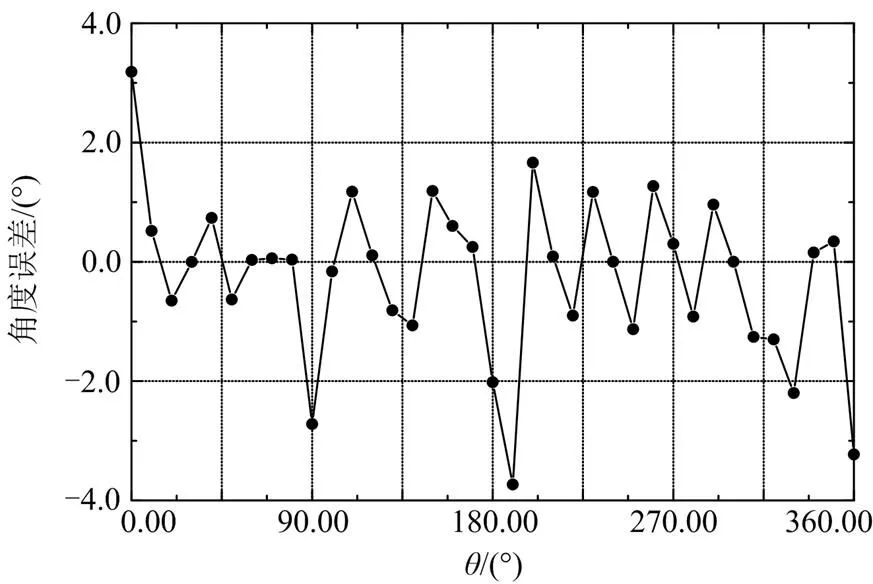
图14 双锁相环估算误差
完成转子初始位置估算后,将电机启动至转速200 r/min,以验证初始位置检测的正确性。图15为使用DPLL结构时电机空载启动过程的转速波形,启动过程平滑稳定,在0.26 s后达到给定转速。
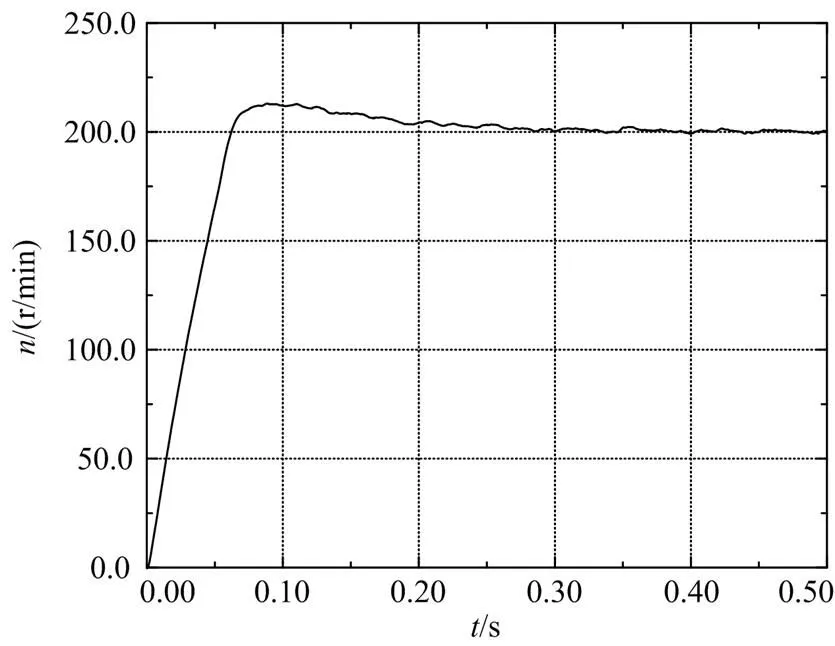
图15 使用双锁相环时电机空载启动转速波形
图16对比了两种锁相环结构在空载启动过程中对转子位置的跟踪效果,DPLL对误差进行补偿,位置估算比PLL快18 ms,速度提升90%,低速阶段DPLL位置跟踪效果更好。启动过程中的相电流波形如图17所示。
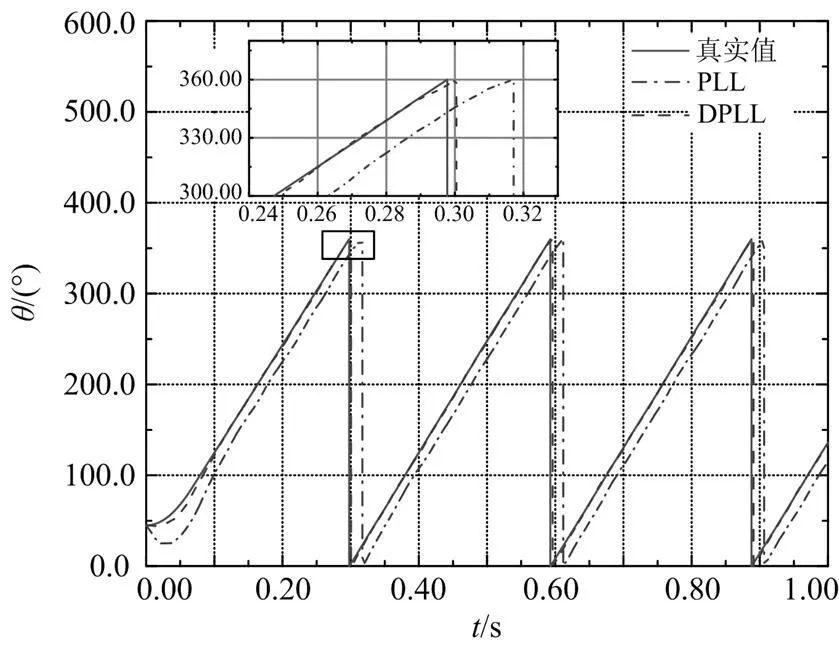
图16 空载启动时转子位置
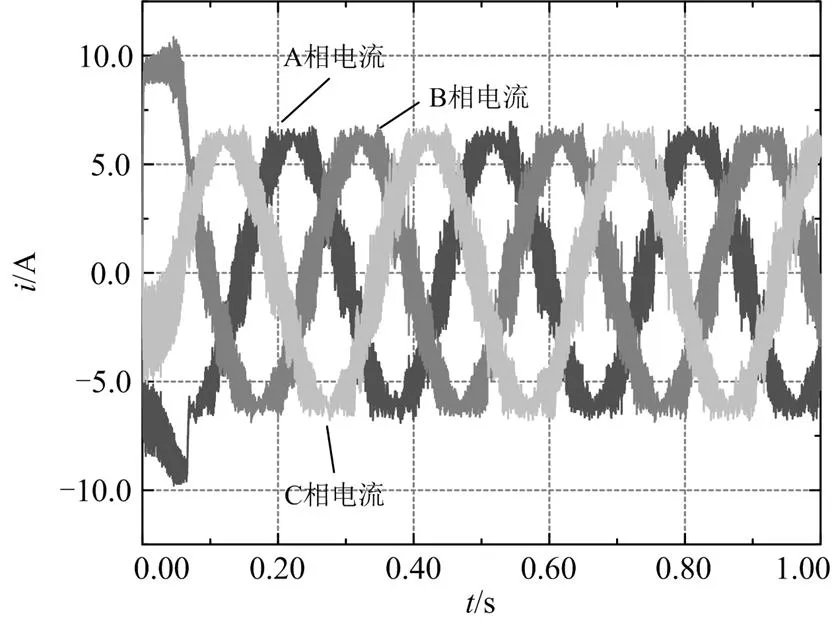
图17 使用双锁相环时电机空载启动相电流波形
图18为负载启动时两种结构对转子位置的跟踪效果,DPLL相比PLL响应速度更快。图19为使用双锁相环时电机负载启动转速波形,由图19可以看出,电机在0.147 s达到给定转速。图20 为使用双锁相环时电机负载启动相电流波形。对比图17与图20可以看出,由于负载的不同,相电流幅值发生变化,其相位与转子位置相关。
表2为两种结构的实验结果对比。从转子初始位置估算来看,DPLL相比PLL平均估算时间缩短20 ms,最大估算误差减小5.63°,更有利于电机的快速平稳启动。电机启动时,DPLL对转子位置跟踪更紧密,在空载和负载启动时,DPLL估算的时延更小,转子位置估计值更接近转子位置真实值,能够更快、更稳定地达到给定转速。
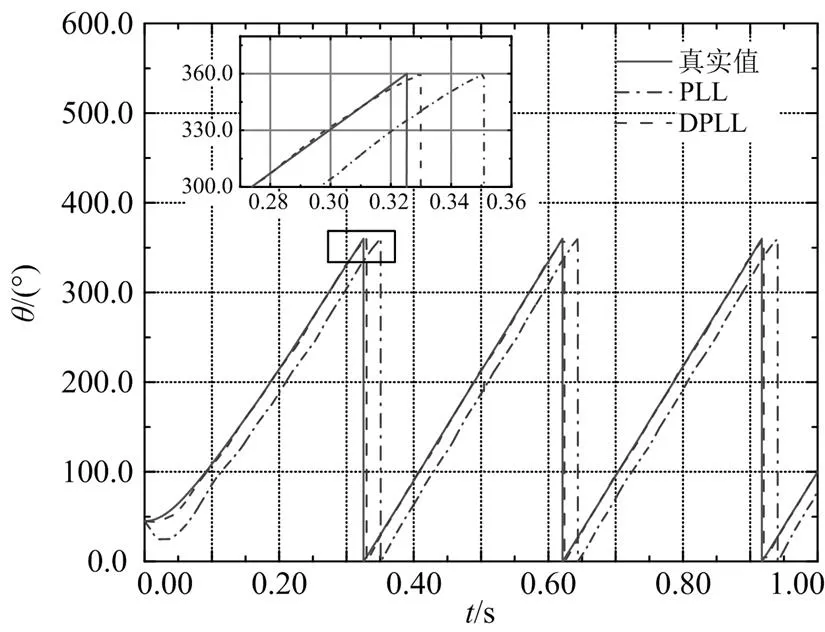
图18 负载启动时转子位置
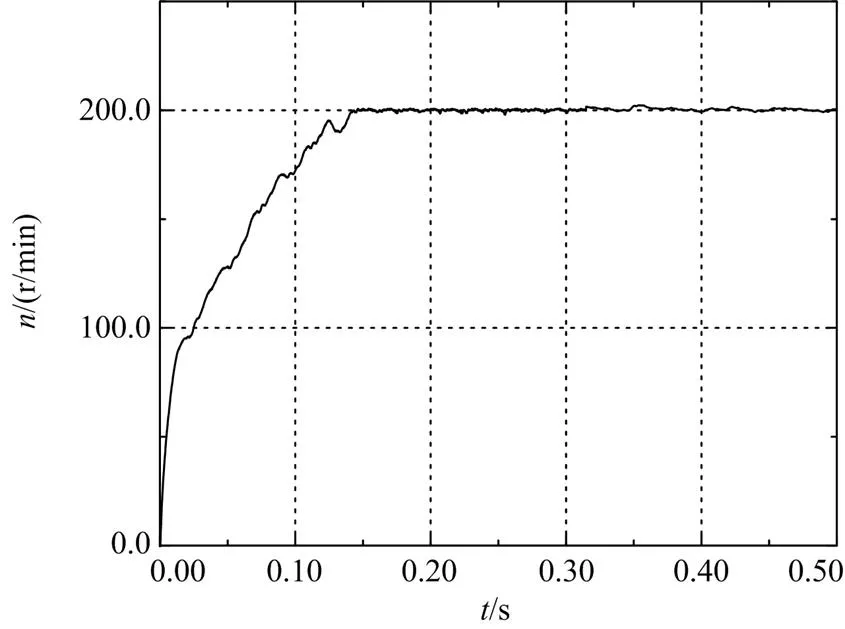
图19 使用双锁相环时电机负载启动转速波形
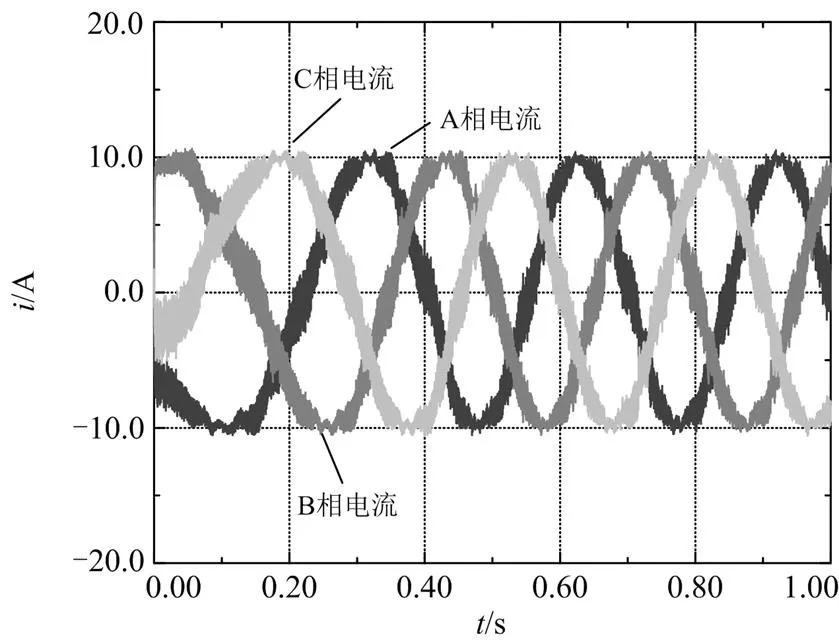
图20 使用双锁相环时电机负载启动相电流波形

表2 实验结果
以一台表1所示参数的内置式永磁同步电机为实验对象,以STM32F405为控制核心,对本文提出的方法进行硬件实验验证。
图21为转子初始位置估算过程曲线和轴响应电流曲线。
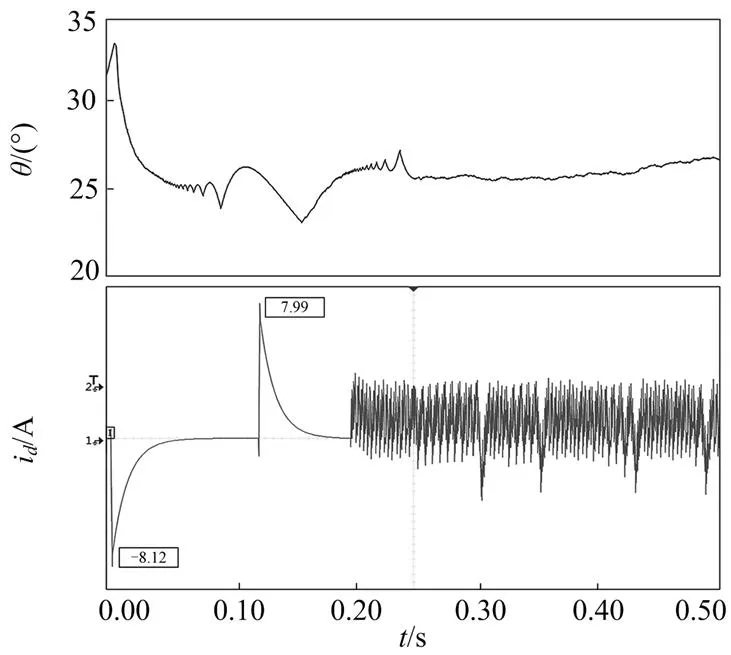
图21 初始角度为27°时的估算过程
图22为电机从静止启动至转速为200 r/min时,双锁相环结构对转子位置的跟踪效果。
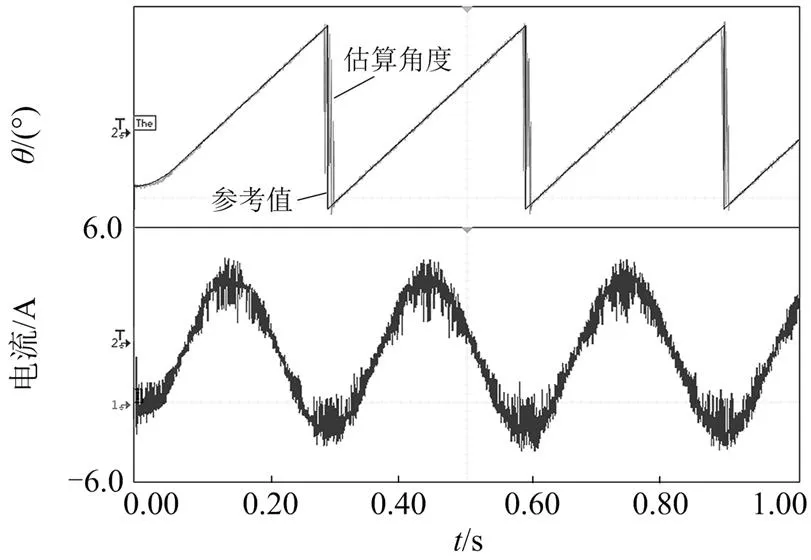
图22 启动时转子位置与电流波形
4 结论
本文针对永磁同步电机转子初始位置估算不准确的问题,提出了一种双锁相环结构,对单锁相环的计算结果进行误差补偿,提高了对转子初始位置估算的准确性和启动后对转子位置的跟踪能力。针对信号注入流程进行了改进,从静止状态的极性判断、转子初始位置估算至启动过程无需中断注入信号和改变信号类型,简化了估算流程,缩短了电机从静止到启动所需时间。
仿真和实验证明,本文提出的信号注入流程和双锁相环结构,在静止状态转子初始位置计算、空载启动和负载启动的情况下,都对转子位置估算保持了良好的效果,降低了时间延迟,误差补偿过程未引入敏感参数,系统能够稳定、高效运行。
[1] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
LIU Jilong, XIAO Fei, SHEN Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
[2] 高建树, 陈伟强, 刘浩, 等. 电动行李牵引车动力参数匹配与车架设计[J]. 机械设计与制造, 2016(10): 222-226.
GAO Jianshu, CHEN Weiqiang, LIU Hao, et al. Dynamic parameters matching and frame design of electric baggage tractor[J]. Machinery Design & Manufacture, 2016(10): 222-226.
[3] 俞沛宙, 王澍, 杨继辉, 等. 基于灰狼优化的永磁同步电机自适应反推鲁棒控制策略[J]. 电力系统保护与控制, 2021, 49(2): 39-46.
YU Peizhou, WANG Shu, YANG Jihui, et al. Adaptive backstepping robust control strategy of PMSM based on grey wolf optimization[J]. Power System Protection and Control,2021, 49(2): 39-46.
[4] 曹亚丽, 曹竣奥, 宋昕, 等. 一种改进滑模观测器的PMSM矢量控制研究[J]. 电力系统保护与控制, 2021, 49(16): 104-111.
CAO Yali, CAO Jun'ao, SONG Xin, et al. Research on vector control of PMSM based on an improved sliding mode observer[J]. Power System Protection and Control,2021, 49(16): 104-111.
[5] 朱军, 田淼, 付融冰, 等. 基于载波频率成分的永磁同步电机转子定位研究[J]. 电力系统保护与控制, 2015, 43(14): 48-54.
ZHU Jun, TIAN Miao, FU Rongbing, et al. Research on rotor position of permanent magnet synchronous motor based on carrier frequency component[J]. Power System Protection and Control, 2015, 43(14): 48-54.
[6] ANAYI, FATIH J. Estimation of rotor position for permanent magnet synchronous motor at standstill using sensorless voltage control scheme[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1612-1621.
[7] 曹帅, 张清枝. 同步发电机气隙对其稳定性和有功功率影响的研究[J]. 电力系统保护与控制, 2015, 43(15): 91-95.
CAO Shuai, ZHANG Qingzhi. Research of influence of synchronous generator air-gap on stability and active power[J]. Power System Protection and Control, 2015, 43(15): 91-95.
[8] 田兵, 安群涛, 孙东阳, 等. 基于磁饱和效应的表贴式永磁同步电机初始位置检测方法[J]. 电工技术学报, 2016, 31(1): 155-164.
TIAN Bing, AN Quntao, SUN Dongyang, et al. Initial position estimation for surface permanent magnet synchronous motors based on magnetic saturation effect[J]. Transactions of China Electrotechnical Society, 2016, 31(1): 155-164.
[9] LI S, ZHENG S, ZHOU X, et al. A novel initial rotor position estimation method at standstill for doubly salient permanent magnet motor[J]. IEEE Transactions on Industrial Informatics, 2017, 14(7): 2914-2924.
[10] 刘颖, 周波, 冯瑛, 等. 基于脉振高频电流注入SPMSM低速无位置传感器控制[J]. 电工技术学报, 2012, 27(7): 139-145.
LIU Ying, ZHOU Bo, FENG Ying, et al. Sensorless control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed[J]. Transactions of China Electrotechnical Society, 2012, 27(7): 139-145.
[11] 刘计龙, 付康壮, 麦志勤, 等. 基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J]. 中国电机工程学报, 2021, 41(2): 749-759.
LIU Jilong, FU Kangzhuang, MAI Zhiqin, et al. Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency notch filter[J]. Proceedings of the CSEE, 2021, 41(2): 749-759.
[12] 张振波, 王海云, 王维庆, 等. 基于改进型环路滤波器的单相锁相环[J]. 电力系统保护与控制, 2021, 49(13): 135-141.
ZHANG Zhenbo, WANG Haiyun, WANG Weiqing, et al. Single phase locked loop based on improved loop filter[J]. Power System Protection and Control,2021, 49(13): 135-141.
[13] ZHANG X, LI H, YANG S, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4702-4713.
[14] HUANG Z, YOU L, WANG Z. Sensorless initial rotor position identification for non-salient permanent magnet synchronous motors based on dynamic reluctance difference[J]. IET Power Electronics, 2014, 7(9): 2336-2346.
[15] BI G, WANG G, ZHANG G, et al. Low-noise Initial position detection method for sensorless permanent magnet synchronous motor drives[J]. IEEE Transactions on Power Electronics, 2020, 35(12): 13333-13344.
[16] CUI W, ZHANG S, FENG Y. Improved sensorless control scheme for PMSM based on high-frequency square-wave voltage injection considering non-linear change of inductance in D-Q axis[J]. AIP Advances, 2021, 11(1): 1-5.
[17] 于安博, 刘利, 阚志忠, 等. 高频脉振信号注入永磁同步电机无滤波器初始位置辨识方法[J]. 电工技术学报, 2021, 36(4): 801-809.
YU Anbo, LIU Li, KAN Zhizhong, et al.Initial position identification of PMSM with filterless high frequency pulse signal injection method[J]. Transactions of China Electrotechnical Society, 2021, 36(4): 801-809.
[18] 邵俊波, 王辉, 黄守道, 等. 一种表贴式永磁同步电机无位置传感器低速控制策略[J]. 中国电机工程学报, 2018, 38(5): 1534-1541.
SHAO Junbo, WANG Hui, HUANG Shoudao, et al. A position sensorless control strategy of surface-mounted permanent-magnet synchronous motors for low-speed operation[J]. Proceedings of the CSEE, 2018, 38(5): 1534-1541.
[19] 田素立, 赵瑞杰, 李朝锋, 等. 永磁同步电机角度软锁相环估算方法研究[J]. 电力系统保护与控制, 2017, 45(18): 108-113.
TIAN Suli, ZHAO Ruijie, LI Chaofeng, et al. Research of angle soft phase locked loop estimation method of permanent magnet synchronous motor[J]. Power System Protection and Control, 2017, 45(18): 108-113.
[20] SUN W, SHEN J X, JIN M J, et al. A robust magnetic polarity self-sensing method for startup of PM synchronous machine in fanlike system[J]. IEEE Transactions on Industry Applications, 2017, 53(3): 2169-2177.
[21] GONG L M, ZHU Z Q. Robust initial rotor position estimation of permanent-magnet brushless AC machines with carrier-signal-injection-based sensorless control[J]. IEEE Transactions on Industry Applications, 2013, 49(6): 2602-2609.
[22] XU P L, ZHU Z Q, WU D. Carrier signal injection-based sensorless control of permanent magnet synchronous machines without the need of magnetic polarity identification[J]. IEEE Transactions on Industry Applications, 2016, 52(5): 3916-3926.
[23] YI W, GUO N, ZHU J, et al. Initial rotor position and magnetic polarity identification of PM synchronous machine based on nonlinear machine model and finite element analysis[J]. IEEE Transactions on Magnetics, 2010, 46(6): 2016-2019.
Rotor initial position estimation method of PMSM based on a double phase-locked loop
XU Meng1, WANG Yanyang1, GAO Jie1, MI Yanqing2
(1. College of Electronic Information and Automation, Civil Aviation University of China, Tianjin 300300, China;2. School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China)
In sensorless control of a permanent magnet synchronous motor (PMSM), the initial position estimation is difficult. An accurate estimation method based on square-wave voltage injection with frequency conversion and double phase-locked loop is proposed. First, the polarity of the rotor is determined by applying a low frequency square wave voltage in the opposite direction of the same amplitude. Then, the frequency is increased to 3 kHz, and a double phase-locked loop is used to compensate the rotor position adaptively to improve estimation accuracy. Finally, it keeps signal injection for PMSM start-up with no-load and load experiments. The injected signal is not interrupted nor changed during the whole process. Experiments show that the maximum error is less than 3.73°, and the average estimate time is 0.18 s. The motor remains stationary. When the PMSM is started up, the double phase-locked loop shortens the time by 18 ms compared with the PLL and the maximum compensation angle is 38.39°. The estimation process does not introduce sensitive parameters, and the system has good stability and speed.
PMSM; signal injection method; rotor initial position; double phase-locked loop; error compensation; sensorless control
10.19783/j.cnki.pspc.211616
国家自然科学基金项目资助(51707195);中央高校基本科研业务费中国民航大学专项资助(3122013D018)
This work is supported by the National Natural Science Foundation of China (No. 51707195).
2021-11-29;
2022-01-04
徐 萌(1968—),女,硕士,副教授,研究方向为航空机电设备故障诊断;E-mail: xumeng1968@126.com
王艳阳(1996—),男,硕士研究生,研究方向为永磁同步电机及其控制;E-mail: 2020022212@cauc.edu.cn
高 洁(1984—),女,通信作者,博士,讲师,研究方向为电机及其控制。E-mail: jiegao@cauc.edu.cn
(编辑 魏小丽)