基于机械控制系统的全自动沙柳种植装置创新研究
2022-10-21陈志斌张智武
陈志斌,张智武
(湖南铁路科技职业技术学院,湖南 株洲 412006)
防风固沙是干旱、半干旱地区为了保持水土、防止沙尘暴等恶劣天气而进行的一种生态建设活动。我国沙漠、戈壁、荒漠化土地总面积约1 308×104km2,占土地总面积的13.5%。近20年来,人工 “变绿” 的植柳工程一直在持续进行中,生态环境状况整体呈现好转趋势,但生态环境质量整体仍十分脆弱,局部生态问题依然存在。防风固沙主要通过播种一些耐干旱的沙生植物来实现。目前,国内干旱和半干旱地区人工种植的主要植物是沙柳,其生长迅速,枝叶茂密,根系繁大,固沙保土力强,也是极少数可以生长在盐碱地的一种植物。沙柳主要分布内蒙古、河北、山西、陕西、甘肃、青海、四川、西藏等地,是作用于防风固沙的主力,也是中国沙荒地区造林固沙造林先锋树种。目前沙柳种植广泛采用扦插种植法,在4月上旬—5月上旬和秋季9月上旬—10月上旬种植。种植时,需要两人配合作业,一人拿手持式柴油挖坑钻坑机挖出1 m深的坑,另一人准备1~2棵沙柳苗插入坑中。两个熟练工配合作业平均每30 s完成1个坑的种植,株行距按2 m×4 m,83坑/0.067 hm2计算,1 d工作8 h,可完成造林面积约0.32 hm2,成本约为150元/0.067 hm2。这种种植方法虽然普遍,但是存在以下问题:其一,种植效率低,人均种植0.16 hm2/d,相对我国荒漠总面积是杯水车薪;其二,柴油挖坑钻坑机给工人的身体造成巨大伤害,容易造成人体结构损伤和内脏功能代谢发生障碍等,同时产生的噪声还会影响操作者听力和作业质量;其三,人工成本较高,沙漠、荒漠下的恶劣环境,操作机器给人带来的身体伤害造成工人不愿意去干,自然造成人工成本增加;其四,人工作业时的行株距无法得到保障,造成后期工程机械平茬难度增加。
随着劳动力成本的不断增加,固沙面积、规模的不断扩大,国家对防风固沙要求不断提高,仅仅依靠人工作业方式已经远远不能满足防风固沙的要求。因此,本文针对目前国内沙漠地区防风固沙过程中普遍采用的扦插种植法方式存在的问题进行技术改进,构建一种机械控制的全自动沙柳种植装置。本装置相比已有种植设备,可实现荒漠地区沙柳种植,降低荒漠绿化成本,提升种植质量和效率。
1 系统设计
原理模型所设计的全自动沙柳种植装置系统包括硬件设计和软件设计两大部分。其中,硬件设计主要由底座单元,挖穴单元,种植单元,浇水、施肥单元,控制系统单元,外壳保护单元等六个单元组成。各单元既是独立存在的系统,又相互存在关联。因此,各单元不仅要满足自身的功能需要,还要求布局合理、科学分配、结构紧凑、大小适宜。这是因为,要实现自动化种植作业,软件设计既要做到能驱动每个单元的硬件系统,并对其采取闭环措施,还要做到各单元联动动作的数据监控,即能对工作过程中出现的故障完成自行诊断,并显示在控制屏幕。
1.1 硬件设计
1.1.1 底座单元
底座单元主要由支撑底板、螺旋推进器、挡沙罩、螺旋推进器、双轴驱动电机、螺旋推进器固定支撑架等部分构成。
支撑底板上端用内六角螺钉连接挖穴单元、种植单元、浇水施肥单元、控制单元等,下端左右两侧各由一个24 V、60 W、150 r/min输出扭矩28 kg·cm的双轴直流减速电机驱动一对不同旋向的螺旋推进器。底座单元的驱动原理是:两对不同旋向的螺旋推进器,左侧一对为右旋,右侧一对为左旋,利用滚动摩擦的螺旋推进器的旋转运动转化为直线运动,通过改变两对螺旋推进器的旋向能直接驱动底座带动整个装置前进、后退、左移、右移、原地旋转等。具体运动过程为:①当左侧驱动电机反转右侧驱动电机正转时,底座前进;②当左侧驱动电机正转右侧驱动电机反转时,底座后退;③当左、右两侧驱动电机同时反转时,底座左移;④当左、右两侧驱动电机同时正转时,底座右移;⑤当只有左侧电机正转或者右侧电机反转时,底座向左原地旋转;⑥当只有左侧电机反转或者右侧电机正转时,底座向右原地旋转。
底座单元设计成螺旋推进方式,把回转运动变为直线运动,结构简单,传动平稳,噪声小,能使设备迅速朝所需方向移动,有很强的激动性能,便于种植时的换向,还能很好地防止打滑。环境越是恶劣,它的适应性越好,且摩擦小。这是履带式和轮式结构底盘的行走方式所不能匹及的。外,因为推进器能产生强大的推力且与地面的接触面积大,单位压力比轮式结构小,所以能适应沙丘、平原、丘陵、黏土地、雪地、泥泞、沼泽地等环境行驶。
1.1.2 挖穴单元
挖穴单元主要由摇杆驱动电机,驱动凸轮,驱动连杆,连接滑块,驱动支架,连接齿轮、带孔螺旋挖穴钻头,钻头连接滑环、轴承等组成。
挖穴单元包括两大部分,第一部分是摇杆驱动机构,第二部分是挖穴机构。摇杆驱动机构是用24 V、60 W、6 r/min输出扭矩220 kg·cm电机驱动凸轮驱动连杆连接挖穴机构做匀速下降加速上升运动来完成挖穴工作。挖穴机构因为挖穴钻头需要供给水溶液设计成内部带孔结构,电机输出轴不能直接驱动钻头,在钻头颈部和电机输出轴上都配有圆柱直齿轮间接驱动,驱动电机选用24 V、28 W、150 r/min输出扭矩13.46 kg·cm的行星减速电机,钻头是螺距为30 mm厚度为3 mm的锰钢单片螺旋叶片焊接在有内孔且四周有玉米状小孔的刀体组成(小孔分布在导体的螺旋叶片中间),钻头颈部套在一对深沟球轴承固定在驱动支架上。经实地测试,挖穴系统能满足沙地、泥地土壤环境作业。
挖穴单元具体的工作过程是:①启动挖穴驱动电机,1~2 s后电机达到正常转速;②启动摇杆驱动电机,驱动凸轮使连杆带动挖穴钻头做匀速向下运动开始挖穴(钻孔),当钻头接触到 “地面” 时,启动浇水、施肥单元的水泵(在驱动支架上设有光电开关,当检测到位置信号便开始工作)工作,水泵的水溶液通过滑环进入螺旋钻头(虽然钻头有自转,但是由于滑环的作用保障水管不会自卷),再通过螺旋钻头的小孔喷入正在挖的穴槽中。这样做到的作用是:给种植的沙柳苗提供营养液;因为沙子不具备黏附性,水溶液可增加沙子的黏附性,防止好的穴坑坍塌。达到挖穴行程10 cm(预设),电机继续工作则驱动摇杆带着钻头急性返回,这样做能防止已挖好穴坑周围的沙子坍塌把穴堵住。
1.1.3 种植单元
种植单元由种植箱料筒、取苗送苗转轮、取苗送苗转轮端盖、传动链轮、传动链条、圆锥齿轮、种植箱换向料筒、种植箱换向料筒拨片、种植系统驱动电机、驱动电机支架、料筒固定支架等部分构成。
种植传动系统连接链条把种植箱传动拨料桶连接链轮A、种植箱传动链条张紧链轮、种植箱传动拨料桶连接链轮B连接起来,把取苗送苗转轮和种植箱换向料筒拨片(料筒拨片为半通槽,即一侧开口,另一侧封闭)形成90°错位关系,通过张紧轮的位置调整使链条具有合适的张紧度,以确保传动系统稳定运行。取苗送苗转轮通过轴承套入种植箱料筒,种植箱料筒月能容纳沙柳苗(直径约为6.5 mm)200根。由于取苗送苗转轮和种植箱换向料筒拨片处于异面状态,在种植箱传动拨料桶连接链轮B轴的末端用一对锥齿轮配对以改变传动方向,种植驱动电机选用24 V、60 W、30 r/min输出扭矩68 kg·cm满足使用要求。在种植箱换向料筒下端设有大于沙柳苗直径约为12 mm的圆槽,使沙柳苗能顺利通过。
种植单元具体的工作过程是:①把需要种植的沙柳苗截成100 mm/根(根据模型比例预先设定)放入种植箱料筒内;②启动种植系统驱动电机,由于取苗送苗转轮与种植箱换向料筒拨片互成90°错位关系,当带凹槽的取苗送苗转轮从料筒中拨下一根沙柳苗时,通过斜口进入种植箱换向料筒,落入水平状态的换向料筒拨片,沙柳苗在料筒拨片内旋转270°后在重力作用下通过圆孔掉入已挖好的穴槽中。
1.1.4 浇水、施肥单元
浇水、施肥单元主要由水箱、水泵、进水管、出水管、水箱塞组成。浇水、施肥单元的进水口连接水箱下端,出水口连接在挖穴单元的滑环上。当挖穴螺旋钻头开始挖穴时,水泵开始泵营养水溶液,通过滑环进入钻头,在从钻头的玉米状螺旋小孔喷到穴内。
1.1.5 控制单元
控制单元由西门子200 Smart PLC、西门子700IE触摸屏、信号检测开关、继电器以及各电气执行单元组成,实现种植机的智能控制。
1.1.6 外壳单元
外壳单元主要是用激光切割切成不同形状的5 mm厚的亚克力板用内六角螺钉和螺母固定拼接而成,它的功能是保护里面的结构,放置控制系统所需的电器元件。
1.2 软件设计
1.2.1 工作过程
本设计的沙柳种植机采用PLC控制方式来完成整机的控制。一个完整的种植工作过程分为以下5步:①挖穴单元的挖穴钻头先预挖出一个10 cm深的穴;②种植机底座单元驱动整机前进一段行距后使种植单元下料口对准已挖好的穴坑中;③种植单元驱动种植系统在料筒中取出一根沙柳苗从料斗中下插入穴坑中完成种植;④下一个种植过程循环上述①~③;⑤完成行距种植后,株距种植横向移动种植机即可。
1.2.2 技术说明
KA1接通,M1电机正转;KA2接通,M1电机反转;KA3接通,M2电机正转;KA4接通,M2电机反转;KA1、KA3接通,整机左移;KA2、KA4接通,整机右移;KA1、KA4接通,整机前移;KA2、KA3接通,整机后移;KA5接通,M3电机正转挖穴;KA6接通,M1电机反转,退出挖穴;KA7接通,M4电机正转,种植树苗;KA8接通,M4电机反转,返回装树苗;KA9接通,M5电机正转,浇水下降;KA10接通,M5电机反转,浇水上升;KA11接通,M6电机正转,浇水。
1.2.3 控制流程
驱动种植系统的机械部分运动具有较强的逻辑运算关系,使用PLC控制方式能很好地做到整机系统控制,还能完成工作过程的数据反馈和监控。为了保障机械部分各单元的稳定运动,在控制系统中设计了硬件和软件的保护。在硬件方面,如果在运行中出现紧急故障时,拍下急停按钮,整机停止工作。在软件方面,也进行了双重设计。一是在程序上有检索保护,即当任何检测信号发生异常或警报则自动执行停机,待异常警报解除才可恢复工作;二是在控制屏幕上设有数据监控界面如遇异常情况,系统的数据界面会及时记录对应警报数据并反馈给显示屏幕。全自动沙柳种植机程序控制流程图,见图1。
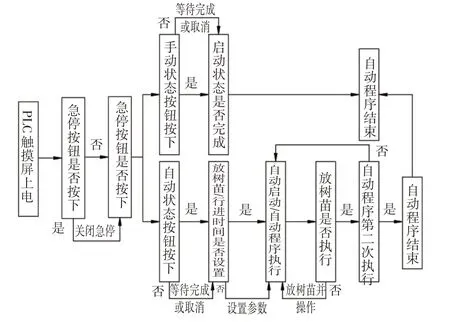
图1 全自动沙柳种植机程序控制流程图Fig.1 The program control flow chart of full automatic Salix planter
1.2.4 操作界面与显示
控制界面配合CPU选用的是西门子Smart 700IE V3 7英寸(1英寸≈2.54 cm)工业触摸屏,系统显示屏幕一共设计系统界面、自动界面、手动界面、监视界面、说明界面等五个版面,进入各个板块的界面完成相应动作操作、信息显示和信息反馈等内容。
2 原理样机制作
本研究首先在数字软件Pro/E(Pro/ENGINEER Wildfire5.0)绘制三维模型设计,然后核心部件在Ansys(2021)完成有限元分析仿真,利用仿真数据的分析不断优化模型参数检验设计的科学性、合理性、安全性,确保所有数据安全无误。把各单元零件统一在Pro/E软件绘图模块按图纸比例要求转换成三视图后,再用AutoCAD打开完成修改图层、基本尺寸标注、公差标注、形位公差标注、技术要求等内容。使用这种方法不仅可以保障基本图形的准确性,还能提高绘图效率,节省绘制基本图形的时间。
完成需要加工制作的零件图之后,还要绘制各单元结构简图,并标上对应的零件编号,为统计材料清单做准备。
因为是样机模型,支架、底座等考虑制作材料使用A6061,材料属于中等强度,具有良好的塑性和优良的耐蚀性,加工方法主要采用机械加工。常规零件可在普车、普铣、数控车、数控铣加工完成;一些特殊零件用机械加工无法完成或者用机械加工工艺复杂,如种植箱料筒等零件采用3D打印方法制作能满足使用要求。
3 结语
沙柳种植是防风固沙、绿化沙漠的一种重要手段,也是现今最为普遍的种植方法。本文介绍以机械控制系统的新型全自动沙柳种植装置,可实现自动化种植作业,降低了人工成本,提高了种植效率,同时保证了种植质量,减少了原材料的损耗。
