一种基于PIV技术的土体抗拉强度及裂缝形成过程试验装置研发
2022-10-20胡胜华许汇源袁晶晶蒋文豪王菁莪
黄 维, 胡胜华*, 许汇源, 艾 东, 袁晶晶, 蒋文豪, 邱 爽, 黄 伟, 刘 胜, 王菁莪
(1.湖北省地质局 第七地质大队,湖北 宜昌 443100; 2.中国民用航空飞行学院 机场学院,四川 广汉 618307;3.中交第二航务工程局有限公司,湖北 武汉 430040; 4.中国地质大学(武汉),湖北 武汉 430074)
在土体强度特性研究中,过去多侧重于土体的抗剪强度和抗压强度,对土体的抗拉强度关注较少,在工程建设中也往往将其忽略[1-2]。随着工程建设及研究的深入,许多土工问题的研究分析及工程设计都必须考虑土体的抗拉强度,例如地裂缝、边坡路基的拉张裂缝、滑坡后缘裂隙的形成以及隧道拱肩拉张掉块等都与土体抗拉强度有着密切关系[3-5]。然而土体抗拉强度一般较低,很难通过测试直接测得。目前比较常用的土体抗拉强度测试方法分为直接法和间接法[6-7]。直接法主要为单轴拉伸法,通过将圆柱体土样两端与拉伸仪器黏结在一起,拉伸土样两端来获得土体抗拉强度,然而这种方法很难将土样两端黏结牢固,造成黏结处容易断裂,而且试验过程中位移的监测并不精细,因此在试验过程中存在一定问题。间接法主要为轴向压裂法、径向压裂法,通过二次计算获得土体的抗拉强度,一般通过抗压强度换算抗拉强度,存在中间换算过程,造成抗拉强度准确性不能得到保证。在土体裂缝形成过程研究方面,国内外学者主要集中在数值模拟领域,陶祥令[8]通过扩展有限元方法(XFEM)模拟计算冻土裂缝的形成过程;乔建伟[9]通过有限元模型模拟地裂缝的形成过程。数值模拟能在一定程度上反映土体裂缝形成过程,但实际往往与数值模拟结果存在一定差距,因此缺乏实际测试结果作支撑的抗拉强度不尽合理。
针对目前土体抗拉强度及裂缝形成过程试验方法中存在的问题,本文基于粒子图像测速(PIV)系统,设计了一种新型土体抗拉强度及裂缝形成过程测试装置,通过“∞”拉伸盒保证土体受拉均匀,减少应力集中现象,准确获得土体抗拉强度;同时通过PIV系统准确获得土体裂缝形成过程及变形特征,使得土体抗拉强度及裂缝形成过程测试更加准确可靠。
1 装置研制
1.1 装置构成
在现有土体抗拉强度测试装置基础上,设计一种基于PIV系统的新型土体抗拉强度及裂缝形成过程测试装置(图1),主要由拉伸系统、控制与数据采集系统、PIV系统三部分组成(图2)。拉伸系统主要提供拉伸动力,进行土体抗拉强度测试;控制与数据采集系统主要控制拉伸系统,设置土体拉伸试样主要参数(拉伸速率等)并采集数据;PIV系统主要用来测试土体裂缝形成过程及形变。

图1 试验装置示意图

图2 试验装置实体图
1.1.1拉伸系统
拉伸系统主要由步进电机、变速箱、丝杠滑台、滑轮导轨、拉伸盒组成。拉伸盒一侧通过刚性连接杆与应力传感器连接,并固定在试验台上;其另一侧通过刚性连接杆与丝杠滑台连接,再连接至步进电机与变速箱。丝杠滑台、步进电机与变速箱均固定在试验台上。拉伸盒底部安装滚珠滑槽,应力传感器两端分别固定在试验台与拉伸盒一侧,位移传感器固定在试验台上,测头与拉伸盒另一侧接触。步进电机主要提供拉伸动力,变速箱调节拉伸速度,应力传感器用于测试拉应力,位移传感器用于测量拉伸长度。
为了保证该试验装置能够直接真实地反映试样受拉状态,设计拉伸盒如图3所示。拉伸盒由可通过蝴蝶螺母固定的左右对称两部分组成,其材质为不锈钢,固定后长120 mm、宽80 mm、厚40 mm。拉伸盒中心装样部分设计为“∞”形,由半径为30 mm的两个对称相交圆组合,相交部分的长度为50 mm。

图3 拉伸盒示意图
1.1.2控制与数据采集系统
控制与数据采集系统主要由微型计算机(带触屏功能)组成。软件系统是基于美国国家仪器公司研制的LabVIEW系统编程开发的,主要包括数据采集、GPIB、串口控制、数据分析、数据显示及数据储存等功能。
在计算机屏幕初始界面打开试验装置控制系统程序,弹出如图4所示的操作界面,在该界面下开展不同土体的抗拉强度测试。可选择不同的拉伸速度来进行拉伸试验,可控制电机前进或后退,可命令拉伸盒开始拉伸或复位。与此同时,拉伸时的速度、拉伸力、位移—时间曲线、应力—时间曲线都能实时地在此界面显示出来。点击数据记录,能记录试验数据,并以Excel表格形式导出数据,方便后期对试验数据进行处理。

图4 试验装置控制系统的操作界面
1.1.3PIV系统
PIV是一种光学测量技术,由于其具有非接触式测量、操作简单、精度较高、受外界干扰小等优点,广泛应用于航天、岩土、流体试验等领域[10]。在岩土领域,PIV技术主要应用于岩土体的位移及形变测试[11]。PIV技术的基本原理是:在试样上标记示踪粒子,然后给试样提供充足的光源,让示踪粒子能够轻易被分辨;用CCD工业相机对试样进行连续拍照,记录试样表面示踪粒子的运动过程,得到连续时刻(t1-t2)的光学图像;通过分析模块,运用图像相关性算法,识别同一示踪粒子在连续2张照片中的位移,进而计算出试样在t1-t2时刻的形变。
PIV系统主要由CCD工业相机及摄影灯组成。工业相机分辨率为2 748×2 200像素,曝光时间为0.06~1×106ms,具有黑白平衡、色彩还原等功能,能将拍摄的照片通过USB接口传输到电脑中。摄影灯为工业相机拍摄过程提供补充光源,降低照片的噪点[12]。
1.2 装置主要技术指标
本装置的核心部件为拉伸系统、应力传感器、位移传感器和工业相机。各部件核心参数如下:
(1) 拉伸系统可实现最大空载速度7.6 mm/min、最小空载速度0.059 mm/min;
(2) 应力传感器量程为30 kg,测试最大拉力为300 N,精度达到0.03%;当拉伸试样20 mm厚时,可测得抗拉强度范围是0~312 kPa;
(3) 位移传感器量程为12.7 mm,精度为0.01 mm;
(4) 工业相机有效分辨率为600万像素,成像距离为50~100 cm,畸变率<1%。
1.3 仪器验证与标定
1.3.1仪器验证
该试验装置的关键是保证试样拉伸破坏面处于完全受拉状态,减少应力集中现象。为消除试样拉伸过程中的应力集中,拉伸盒采用“∞”形设计,拉伸破坏面位于两圆相交部分。通过FLAC 3D数值模拟软件,建立“∞”形拉伸盒的试样受拉模型,设定试样一端固定,另一端以恒定速度移动,完全模拟土体拉伸强度测试装置的试验过程。
数值模拟试样受力云图(图5)显示,试样受力较为均匀,在试样中心拉伸破坏面为拉张受力状态,未出现应力集中现象。数值模拟试样塑性破坏区(图6)显示,试样塑性变形主要集中在试样拉伸破坏面,且都为拉张破坏。因此通过数值模拟可知,土体拉伸破坏面处于完全受拉状态,破坏主要集中在拉伸破坏面,拉伸破坏面未存在明显应力集中现象,该试验装置满足设计要求[13]。
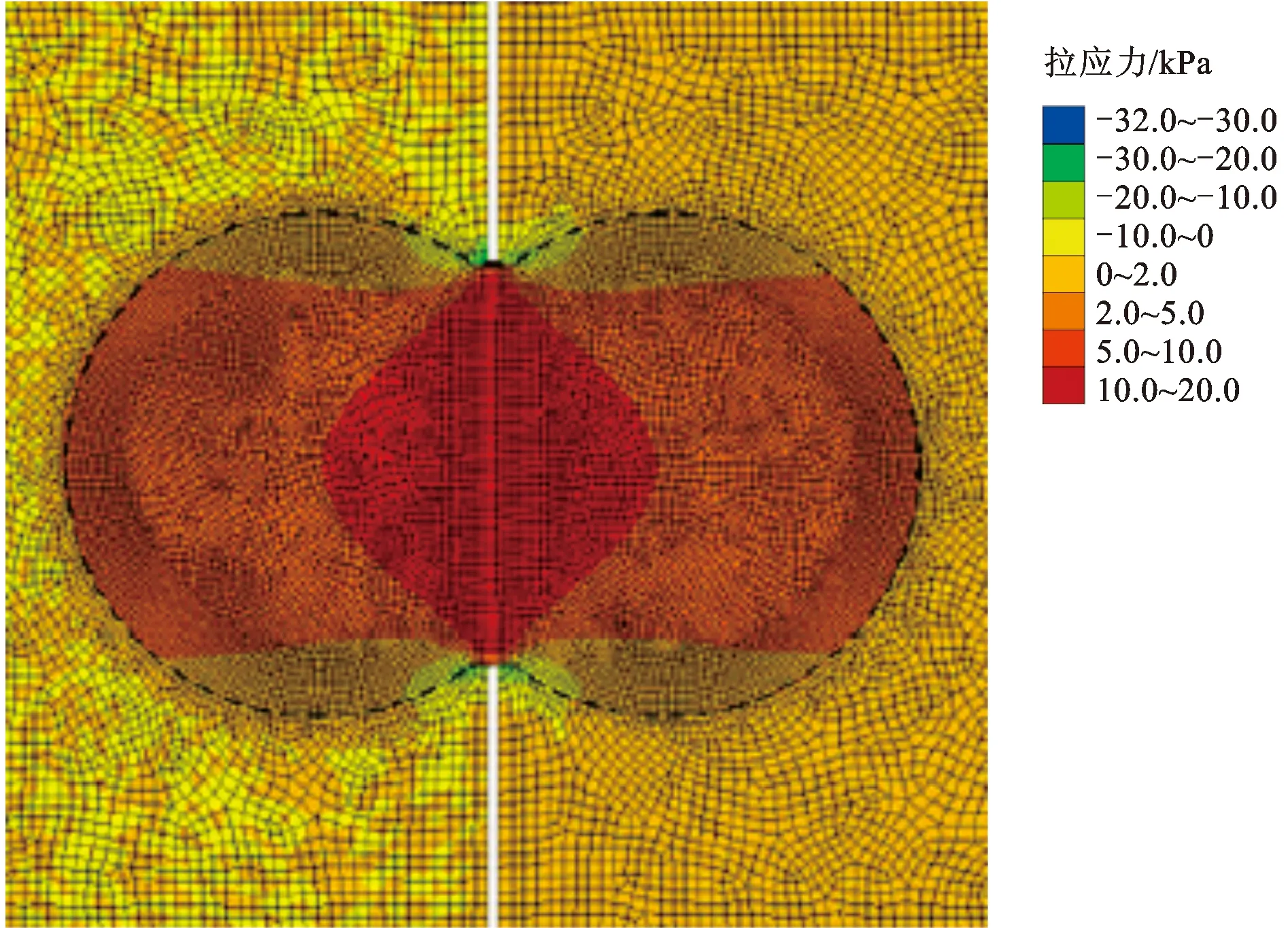
图5 数值模拟试样受力云图

图6 数值模拟试样塑性破坏区
1.3.2传感器的标定
(1) 压力传感器的标定。压力传感器较为精密,在长时间使用后,可能形成一定误差,为了保证测量的准确性,需要对压力传感器进行标定。实验室中最常用的方法就是通过测力砝码来标定。将压力传感器一端固定,另一端通过细线悬挂不同质量的标准砝码,取重力加速度g=9.8 m/s2,砝码所受重力大小作为标准输入值。每次施加的砝码稳定后,采集压力传感器读数,最后对采集数据进行线性拟合,确定各比例系数,完成压力传感器的标定。
(2) 位移传感器的标定。位移传感器采用静态标定。将位移传感器固定在支架上,手动旋转千分尺使测试盘贴紧探头,记为标定起始点;转动手柄1圈,测试转盘位移0.5 mm,依次转动手柄4圈,测试转盘移动2.0 mm,获得5个测点,分别记录位移传感器读数。将测试转盘位移作为输入值,位移传感器读数作为采集值,对采集数据进行线性拟合,完成位移传感器的标定。
(3) 工业相机的标定。工业相机采用张正友棋盘格法[14]进行标定。棋盘是一块由黑白方块间隔组成的标定板,用来作为标定物。通过调整相机的方向,为标定物拍摄10~20张不同方向的照片,从照片中提取棋盘格角点,估算理想无畸变情况下的5个内参和6个外参。应用最小二乘法估算实际存在径向畸变下的畸变系数,优化相机参数,完成相机标定。
2 测试流程
2.1 试样制备
该试验装置可测试不同干密度、不同含水率的土样。拉伸盒上下两端用蝴蝶螺母固定,参照《土工试验规程》(SL237—1999)[15],为试样配置目标干密度和目标含水率。先将重塑试样配置到液限含水率附近,通过制样器制样。同时,在试样表面布置中国ISO标准红色石英砂,石英砂粒径0.08~0.25 mm,作为PIV测试示踪粒子。将试样放入无水保湿缸中,利用水分自然蒸发来降低试样含水率,每隔一段时间称量试样质量,直至达到目标含水率。当试样达到目标含水率后,将其用保鲜膜包裹,放入保湿缸中静置24 h,让试样中的水分充分运移,保证水分均匀分布,完成试样制备(图7)。

图7 制备完成的试样
2.2 测试过程
首先将试样正确安装在滑槽上,给试验装置设定微小位移,使拉伸盒受到一个微小拉应力,并使试验装置各部件连接紧密,消除杆件中连接松动而产生的误差。去除拉伸盒上下两端的固定蝴蝶螺母,将位移传感器、应力传感器读数归零。拉伸速率设定为0.02 mm/min,打开并固定摄影灯,设置PIV系统拍照时间间隔为3 s。试验开始后,控制与数据采集系统采集拉伸过程的应力读数和位移读数,PIV系统拍摄照片,数据采集频率为3 s/次。当试样产生明显拉张裂缝且拉应力降为0时,视为试样完全受拉破坏,试验装置随即停止工作,试验结束。
3 测试结果
3.1 抗拉强度
应力传感器可获得拉力F,位移传感器可获得位移ΔL。土样总长度L为100 mm,土样中心平面面积S为9.6 cm2。则拉应力σt、拉应变ε可分别表示为:
σt=F/S×10
(1)
ε=ΔL/L×100
(2)
以拉应变ε为横坐标,拉应力σt为纵坐标,绘制试样应力—应变曲线(图8),其峰值对应抗拉强度。结合裂缝形成过程,将应力—应变曲线划分为4个阶段,即结构调整阶段(Ⅰ)、微裂缝发育阶段(Ⅱ)、裂缝形成阶段(Ⅲ)、裂缝贯通阶段(Ⅳ)。同时,制作了含水率相同、干密度不同的试样,测试土体抗拉强度。以含水率18%为例,制作了干密度分别为1.4、1.6、1.8 g/cm3的试样,分别测试其抗拉强度,并绘制应力—应变曲线(图9),结果显示曲线数据较为稳定,随着干密度增大,抗拉强度也增大,符合实际情况,说明仪器测试满足设计要求。

图8 试样应力—应变曲线

图9 不同干密度试样应力—应变曲线
3.2 裂缝形成过程
PIV系统捕捉了试样裂缝形成过程及变形情况,获得了裂缝各个阶段发育特性(图10)。其中,a为试样拉伸破坏面照片,可以直接观察到试样表面裂缝形成过程;b为试样拉伸破坏面位移矢量图,可观察试样中示踪点的运动方向及大小;c为试样拉伸破坏面应变云图,可以观察试样应变大小。

图10 试样裂缝形成过程
在结构调整阶段,试样表面未形成裂缝,拉应力缓慢增加,位移矢量图表明试样顶部出现微小位移差,从应变云图中可以看到试样顶部应变较大,预示着裂缝将从试样顶部开始形成,此时土体结构发生调整。进入微裂缝发育阶段,试样顶部形成微裂缝,拉应力逐渐增加至峰值,应变云图显示应变较大区域与微裂缝一致,且裂缝尖端附近应变最大,此时土体局部结构发生破坏。在裂缝形成阶段,试样表面宏观裂缝逐渐形成,拉应力迅速降低,裂缝两边出现明显位移差,且位移方向基本与裂缝垂直,应变云图显示试样底部应变较大,已经形成潜在贯穿裂缝,土体结构大部分已经发生破坏。进入裂缝贯通阶段后,试样表面裂缝逐步向下贯通,拉应力逐渐减小至0,从位移矢量图中看到裂缝左上半部分位移基本为0,已经和右上半部分分离,此时试样底部应变较大,裂缝已经从上至下贯通形成,土体结构完全破坏[16]。
4 结论
针对目前土体抗拉强度较难直接测量的问题,研制了一种基于PIV系统的新型土体抗拉强度及裂缝形成过程试验装置,取得以下认识:
(1) 该装置由拉伸系统、控制与数据采集系统、PIV系统组成。拉伸系统由步进电机、变速箱、丝杠滑台、滑轮导轨、拉伸盒组成,主要提供拉伸动力,进行土体抗拉强度测试。控制与数据采集系统由微型计算机组成,主要控制拉伸系统并采集数据。PIV系统包括工业摄像机及摄影灯,主要用来测试土体裂缝形成过程及形变。
(2) 通过数值模拟,表明土体拉伸破坏面处于完全受拉状态,破坏主要集中在拉伸破坏面,拉伸破坏面未存在明显应力集中现象,因此该装置满足设计要求,能准确获得土体抗拉强度。同时通过PIV系统,可获得土样裂缝形成过程及裂缝各个阶段发育、变形特征。
(3) 该装置可用于开展不同干密度、不同含水率、不同性质土体的抗拉强度及变形破坏试验,对土体抗拉特性研究具有指导意义。
