三维激光扫描技术在矿山边坡监测中的应用
2022-10-20张雪
张 雪
(贵州省有色金属和核工业地质勘查局二总队,贵州 六盘水 553000)
矿产资源的开发与利用是社会经济发展和基础建设不可获取的原材料之一,随着科学技术的发展,其需求总量和矿产资源类型逐渐发生变化[1]。
现阶段,随着地表矿产资源的利用殆尽,逐渐向深部推进,导致矿产资源的开发难度逐渐增加,进而造成一定的安全事故[2]。虽然我国相关部门加大力度督导,同时矿山企业对安全生产极为重视,但仍不可避免的出现了一定的安全事故。因此,这就要求对矿山形变监测提出了更高的要求。常见的边坡监测技术方法较多,如GPS、InSAR、GNSS、三维激光扫描技术、CORS等[3-5]。
由于研究区地形地貌变化较大,导致采用InSAR、GNSS、CORS等技术过程中所采集的数据误差相对较大,进而引起监测精度的降低[4]。同时,三维激光扫描技术具有干扰因素少、精度快和测量快等优势,故本文选择该方法在某金属矿山开采边坡监测中应用,为进一步研究该开采边坡的形变规律提供参考。
1 三维激光扫描技术基本原理
三维激光扫描技术是现代会新型测绘技术的代表之一,是以三维激光扫描仪为基础发展起来的,集成了扫描系统、激光测距系统、内部校正以控制系统、CCD系统等[6]。三维激光扫描技术中最为重要的就是激光测距系统,包括激光脉冲测距、相位干涉法测距以及三角法测距等方法类型。其中,最为常用的方法是激光脉冲测距法。
激光脉冲测距是三维扫描测量技术中最为常用的一种方法,具有测量速度快、精度高的优势,其工作原理主要为:以三维激光扫描仪中的激光二级发射装置发生具有周期性的激光脉冲信号,实现对待测量区域快速扫描目的,当发生的周期性脉冲信号接触到被测区域内的地物时,就可通过地物表面产生反射信号,当扫描仪中的接收透镜接收反射信号后,可根据周期性信号的发射与反射时间、路径等计算出被测点的三维坐标,即通过三维激光扫描快速的获取被测区域分布较均匀的点云数据[7]。
为了更直观的表达该原理,将被测目标体记作P,将三维激光扫描仪的测量距离记作S,将扫描仪镜头在垂直方向的观测角度记作θ,将水平方向上的观测角记作α(图1),则被测目标体P的三维坐标为P(X,Y,Z),其计算公式为:

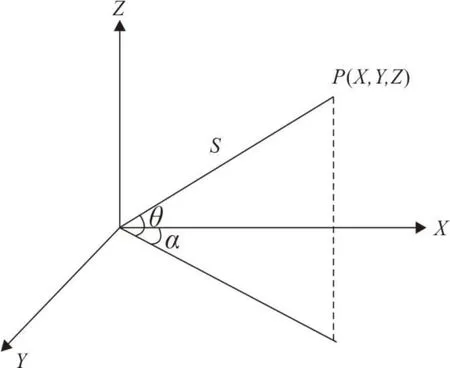
图1 激光脉冲测距基本原理示意图
2 矿山边坡主要监测内容
三维激光扫描技术在边坡形变监测中具有较为广泛的应用实例,并取得了较好的应用成效。将三维激光扫描技术应用于矿山形变监测中,其原理一致,主要监测内容可分为以下几个方面。
2.1 边坡坡度的计算
矿山开采边坡坡度是影响边坡稳定性的主要因素之一。因此,边坡坡度的监测计算是形变监测中的重要内容,是评价该开采边坡是否稳定的基础。
为提高资源利用效率,矿山开采边坡多以高度角为主,且以临空顺层边坡较为常见,容易引起边坡失稳,进而造成边坡滑坡、坍塌等现象[8]。三维激光扫描技术能够较快速的获取被测区域的点云数据,通过系列数据处理就可快速的获取边坡准确的坡度等数据,进而为边坡稳定性分析提供依据。使用三维激光扫描技术获取开采边坡坡度的原理主要为:根据点云数据的坐标系统建立相应的参考平面,将边坡中某一点的三维坐标中的Y至投影至该平面上,此时垂直方向的距离就是边坡的高度H,坡度长L为不同两个点之间的距离与H和参考面交点之间的距离,由此得出坡度为arctan(H/L)。
2.2 边坡土石方量的计算
边坡图示方量的计算是评估开采边坡失稳后诱发灾害范围的主要指标之一,也是编制治理方案的主要依据。因此,边坡土石方量的计算是边坡监测的重要目的之一。边坡土石方量计算方面主要包括规则三角网格法和不规则三角网格法,前者对数据的要求较高,适用于边坡形态较为规则的监测中,其精度较高;后者利用不规则的三角网格,能够有效地提高不规则形开采边坡的监测精度。故本文主要利用不规则三角网格法对开采边坡的土石方量进行监测。使用该方法计算开采边坡土石方量的主要步骤可分为:①根据三维扫描所获的点云数据建立不规则的三角网格,即TIN网格;②以点云数据的坐标系统为基础平台建立相应的参考平面,进一步对位于参考平面之上的开挖体积进行计算,对于位于参考平面之下的体积进行填方计算;③将计算模型中的开挖体积与填方体积叠加,就可获得相应的填方量和挖方量。
3 在矿山边坡监测中的应用
3.1 点云数据获取
研究区为一矽卡岩型铜铅锌多金属矿床,早期开采方式以露采为主,形成了较大规模的开采边坡。加之该区域降水量较大,导致部分边坡失稳滑坡,对矿山安全生产造成了一定的威胁。
鉴于此,本文使用型号为VZ-400的Riegl三维激光扫描仪,对研究区进行扫描测量。根据测绘范围以及边坡分布特征,确定本次的扫描距离为100m,此时该设备的精度为2mm,理论精度可以达到预期要求。
同时,点云数据使用City Sence激光点云绘制软件进行点云数据处理,进一步开展点云数据的拼接、去噪声等处理,就可获得能够反映真实边坡基本形态的边坡点云数据(图2)。
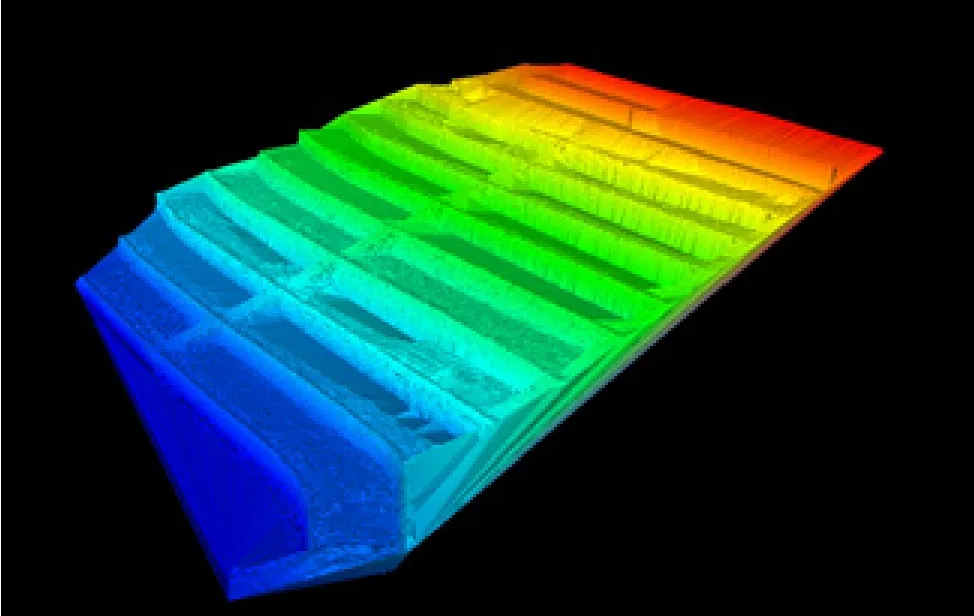
图2 研究区边坡云数据匹配图
3.2 点云数据的处理
点云数据的处理是提高监测精度的基础,也是降低干扰因素的主要途径[9]。点云数据的处理主要包括点云数据的配准、点云数据拼接以及点云数据去噪处理等流程,因此,总体上点云数据的处理流程主要包括:
(1)点云数据的配准和拼接是基础,由于研究区为一矽卡岩型铜多金属矿床,且矿区地形地貌变化较大,导致边坡形态较为不规则,故在开展三维激光扫描获取点云数据过程中需要进行多次扫描,才能获得较高精度的测量数据,即在扫描过程中应需要多个站点进行扫描,此时就造成了点云数据的坐标不统一,需要进行配准[10]。在点云数据配准过程中,主要利用了相邻两个站点之间的3个或者以上的同名控制标靶进行点云数据的配准,可将不同站点的点云数据统一至相同坐标系统下,即点云数据的配准与拼接。
(2)去噪处理。使用三维激光扫描技术获取点云数据的基本原理中,利用了发射信号与反射信号的时间差,此时包含了大量的冗余数据,主要包括树木、植被、行人、建筑物、车辆等,故需要将上述冗余数据剔除,才能够获得更精确的点云数据。点云数据的去噪处理可借助City Sence激光点云绘制软件,通过点云数据分类,将飞点等剔除,就可获得较高精度的点云数据。在完成上述操作的基础上,就可获得更加贴合实际的边坡点云数据,再经过相应的数据处理,可获得边坡土石方量、边坡坡度以及边坡形变特征等。
3.3 边坡土石方量计算
本次采用City Sence激光点云绘制软件对研究的边坡土石方量进行计算,同时,为了对比研究该方面在土石方量计算过程中的精度问题,本次采用两种不同的方法进行对比,即机载扫描点云体积和静态扫描点云体积方法,其计算结果见表1。
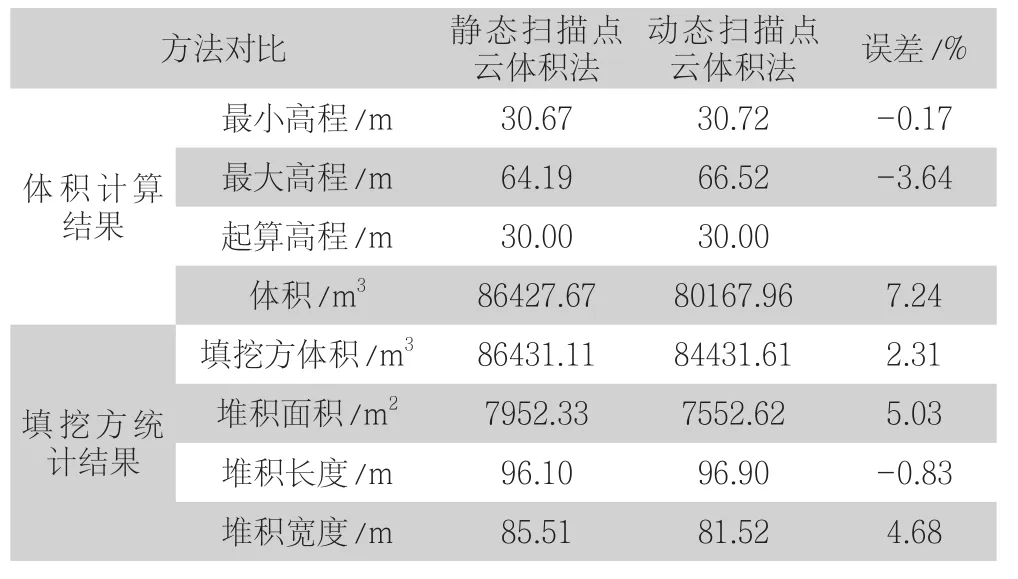
表1 不同方法的边坡土石方量计算统计表
由表1计算结果可知:本次使用动态扫描点云体积法所获得的最小开采高程为30.72m,最大开采高程为66.52m,按照统一的参考平面高程30.00m计算,最终获得填挖方体积为80167.96m3,此时堆积面积可达7552.62m2,堆积长度为96.90m,堆积宽度为81.52m;使用静态扫描点云体积法所获得的最小开采高程为30.67m,最大开采高程为64.19m,按照统一的参考平面高程30.00m计算,最终获得填挖方体积为86427.67m3,此时堆积面积可达7952.33m2,堆积长度为96.10m,堆积宽度为85.51m。同时,本次试验不同方法所获数据的误差介于-3.64%~7.24%之间,均小于10%,在误差允许范围内。
综上所述,使用三维激光扫描技术能够较快速的获取矿山开采边坡监测结果,且精度较高,具有较好的推广使用潜力。
3.4 边坡形变监测分析
矿山开采边坡坡度以及土石方量的模拟计算的最终目的是评价开采边坡的稳定性,即矿山边坡监测的最终目的是分析该边坡失稳的概率以及造成的危害范围等,是矿山安全生产的基础。
此时,可以通过一定时间间隔内的或者一定周期内的三维激光扫描点云数据,通过相同的数据处理方法获取边坡坡度、土石方量等数据,就可获得不同时段内的坡度变化量、高程变化量等数据,进一步得出边坡失稳的运移方向等。
4 结语
综上所述,本次使用三维激光扫描技术在复杂矿山边坡监测中取得了较好的成效,与传统的测量方法相比,该方面具有操作简单、外业工作量、数据处理快和精度高的优势;与InSAR、GNSS、CORS等测量方法相比,具有受测绘环境影响因素小的优势。
因此,在矿山边坡监测中具有较好的应用前景。此外,随着技术的快速发展,三维激光扫描技术中存在的数据处理等问题可得到较大的改善,如噪声剔除质量等,对提升测量精度意义重大。
