湿喷机远程控制系统的设计及实现
2022-10-19赵靖宇王锴邢泊杜孟超
赵靖宇,王锴,邢泊,杜孟超
(1.中铁工程装备集团有限公司,河南 郑州 450016;2.中铁工程装备集团隧道设备制造有限公司,河南 新乡 453000)
湿喷机是一种利用压缩空气将混凝土混合料和速凝剂按比例输送高速喷射到受喷面上,经凝结硬化形成混凝土支护层的工程机械[1],在隧道支护工序中得到了广泛应用,但存在噪音、粉尘污染等问题,特别针对软弱围岩地质,现场作业危险系数高,对操作人员的健康造成很大损害。随着工业智能化技术发展、人口老龄化及工人劳动保护意识提高,“机械化换人,自动化减人”已经成为隧道施工的发展趋势,远程控制技术是其中一个重要发展方向[2]。国内一些煤矿已在矿井掘进机应用远程控制技术,现了掘进机工作过程的定向、定位和定形的自动化远程控制,相关高校采用mesh 网络及无服务平台设计一种远程控制行走机器人,完成了隧道施工探测[3-4]。
本文设计了一种湿喷机远程控制系统,采用无线网络通信,将上位机平台接入隧道局域网实现对湿喷机地远程控制作业。该系统能够实时监控设备运行状态、故障预警,减少隧道工况的安全隐患,为后续无人化与智能化技术引入打下基础。
1 系统总体架构
根据隧道施工实际工况,将湿喷机远程控制系统分为设备车载端和上位机平台两部分,车载端实时采集现场图像及车辆状态参数在上位机平台进行处理显示,操作手在上位机平台根据监测实时作业情况发送控制指令,由车载端进行相关动作执行,两端通过隧道内局域网进行网络通信,系统总体架构如图1 所示。

图1 系统框图
设备车载端由电控系统、摄像系统、信息交互单元三部分组成,电控系统由控制器、传感器等采集车辆状态参数、执行动作指令并将相关数据传输至数据交互模块,视频采集模块实现视频数据实时采集传输,数据交互模块作为数据中转站实现车载端与平台端的数据交互,对两端收发数据进行校验、协议转换;上位机平台负责操作台控制指令采集、车载端数据参数接收及实时视频解析,传输至上位机软件进行显示。
2 网络通信
由于隧道内作业环境较差,线路连接不利于线缆保存和设备移动,而无线局域网(Wireless Local Area Network,WLAN) 具有灵活性强、部署成本低等优点,在工业领域得到广泛应用,因此采用WLAN 实现湿喷机联网,选用IEEE802.11ac 标准的无线网桥设备组建网络,该标准为IEEE 于2013 年推出第五代无线技术标准,在IEEE802.11n标准基础上拥有更大的数据速率,可透过5GHz 频带提供最少1Gbps 接入速率[5]。在隧道网络端口接入无线网桥作为WLAN 的网络节点,组建无线局域网,为保证数据传输稳定性及速度,配合使用全向天线进行输出信号放大,在同一网段分配不同IP 地址,可实现200m 内低延迟无线通信,完全满足湿喷机工作移动范围。平台端通过网络交换机配置网络IP 接入隧道局域网,实现在隧道外远程控制湿喷机湿喷作业。
3 设备车载端
3.1 电控系统
电控系统是下位机车辆状态信息采集和动作执行的关键,选用车载控制器作为电控系统核心,对湿喷机原有传感与控制系统进行改装,控制单元各种输入信号经控制器接收后通过内部程序判断输出控制相应执行元件动作。设计远程/本地两种操作模式,在远程模式下,控制器将输入信号采集信息通过CAN 总线协议传给信息交互单元,同时接收信息交互单元远程控制指令,在本地模式下,控制器上传采集车辆状态信息但不执行远程控制指令,可通过手持遥控器独立控制湿喷机进行作业,如图2 所示。

图2 电控系统结构图
控制器通过各类传感器检测湿喷机发动机、液压油、速凝剂泵等实时温度、压力及臂架姿态限位信息,并接收接近开关信号用于计算当前泵送混凝土速度和泵送方量,当相关信息满足工作条件时会输出相关执行动作控制电机启停或预警指示,同时在遥控器、显示屏、上位机平台予以显示。在臂架控制方面,当接收到遥控器或上位机臂架控制指令时,控制器输出相应PWM 占空比信号控制相关电磁比例阀驱动液压缸运动方向及速度,对于不同臂架动作控制要求输出不同速度曲线,实时调整臂架压力,从而达到稳定精准控制。
在安全方面,针对远程、本地不同控制模式,赋予相应独立控制权限,本地模式下上位机平台只有状态检测权限,无法进行干预,远程模式下远程控制指令只能在上位机平台解除,应急情况下本地操作手可通过急停按键终止设备动作。
3.2 视频采集
视频采集通过云台网络摄像机实现,在湿喷台车主臂和关键视角位置架设摄像机,使上位机平台能够清晰显示湿喷机喷头处、主臂姿态及现场情况,确保上位机平台操作手拥有良好的操作视野。配置网络摄像机IP 地址,可通过上位机平台键盘发送指令控制摄像机360°旋转、调焦、光圈缩放,改变监控视角以应对隧道施工现场意外情况。
3.3 信息处理单元
信息处理单元主要由STM32 单片机、通信模块、交换机组成,控制核心为STM32 单片机,芯片内置了CAN 接口,通过CAN 总线协议与车载控制器进行数据收发,实现对湿喷机的信息采集、动作控制。
为实现信息处理单元与上位机平台数据交互,采用TCP/IP 通信协议,TCP/IP 协议在传输层分为TCP 和UDP 两种协议,TCP 传输协议可靠性强但数据校验机制导致实时性较差,UDP协议传输速度快但存在丢包现象可靠性低。由于上位机平台对视频数据实时性要求较高,因此选用UDP 协议,针对数据丢包不可靠现象,在开发程序中加入数据校验、重传机制,在上位机平台发送指令数据包时,接收端接收到数据包后进行CRC 数据校验,校验成功后向发送端发送一个应答,如果发送端在规定时间内没有收到应答,将重新发送该数据指令,有效防止数据错乱、丢失现象。
在STM32 单片机搭载以太网串口数据转换模块,该模块内置TCP/IP 协议栈,通过串口通信与单片机连接,实现单片机联网功能。配置其IP地址及网络端口,经交换机与车载网桥、摄像头网络通信。单片机主要实现车载端与平台端数据通信,通过建立车载端与上位机的Socket 链接,获取上位机控制指令转发给摄像头和车载控制器的同时,发送车载控制器采集信息与摄像头视频数据至平台端,其交互流程如图3 所示。
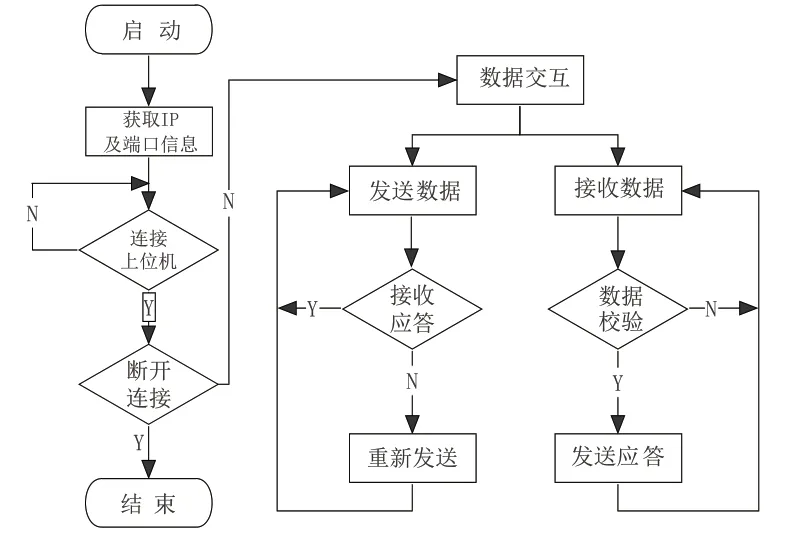
图3 数据交互流程图
4 上位机平台
上位机平台采用某公司嵌入式ARM开发板,采用Cortex-A7 处理器搭载Android 操作系统,支持1080P VC-1、MPEG-1/2/4、VP8、H265/H264 等格式视频解码。上位机控制指令通过数据采集模块采集后发送至车载端信息处理单元,同时接收相关数据在操作界面予以显示。基于湿喷机远程控制作业的特点和要求,使用Qt软件开发编写相应的上位机操作界面,界面集成了湿喷机实时视频、功能状态指示、实时输入输出、故障报警自诊断等功能,界面简洁易读,且可以根据后期技术人员反馈进行功能扩展开发,其主界面如图4 所示。

图4 上位机主界面
主界面为设备工作时主操作界面,提供了湿喷机摄像机实时画面及速凝剂流量、泵送方量等重要参数,通过上下翻页键可调节至实时状态参数界面、输入输出界面及故障诊断界面。状态参数界面包括液压泵、速凝剂泵、空压机、支腿阀、油缸点动、冷却风扇等状态指示和速凝剂参数、混凝土参数、液压油温、油路压强等功能参数,控制IO 界面实时监测控制器IO 输入输出变量,故障报警功能根据控制程序设置报警参数实时检测设备运行状态,当发生设备故障、通信故障、主要参数异常时进行预警,并关闭泵站停止整机动作,以保证施工现场安全。
5 实 验
为了验证该湿喷机远程控制系统,在某厂区内组件无线局域网进行湿喷机喷水测试,由操作人员在操作平台对作业区湿喷机进行远程控制。
经多次实验验证,该系统无线设备网络信号稳定,数据传输丢包率误码率低,能够实现实时数据采集,上位机平台视频显示清晰流畅,控制响应迅速,无明显延迟,湿喷机各项功能运行正常,能够稳定实现远程控制作业(图5)。

图5 湿喷机试验区作业
6 结论
针对隧道内湿喷机作业特点,开发了一种湿喷机远程控制系统,主要包括通信系统架构、信息采集及上位机平台监控,采用UDP 协议实现数据传输,设计了车载控制器、信息交互模块及上位机监控程序,通过WLAN 实现了湿喷机的远程控制。试验表明,该系统能够稳定可靠实现远程湿喷作业,具有良好的控制效率与精度,降低了操作人员事故安全隐患,为隧道设备智能化、无人化提供了基础。