高精度施肥系统设计与实现
2022-10-19蔡景瀚聂雅琳王佳佳汤洪豪高一琛
蔡景瀚,聂雅琳,王佳佳,汤洪豪,高一琛
(洛阳理工学院 计算机与信息工程学院,河南 洛阳 471023)
0 引 言
我国是一个农业大国,也是化肥生产和消费大国。化肥的使用是保持农作物高产的关键,但我国在农业方面对化肥的利用率一直处于较低水平。目前,我国农业施肥过程一直沿用人工手撒以及小型机械喷洒的作业方式,导致施肥量不能精确把控,或施肥量远远大于农作物的实际需求量,这不仅仅造成化肥的浪费,多余的化肥还会流至水体、土壤,直接危害农田周遭的环境;老式的作业方式极易导致肥料在田间分布不均匀,影响农田产量;且这种作业方式对人工的依赖性极高,效率低下,无法高效提升经济效益。
在可持续发展的背景下,农业的可持续发展也受到越来越多人的关注。要实现农业的可持续发展,推行精准农业是关键。精准农业的实施有助于实现经济效益、环境效益及生态效益的平衡发展。而推行精准农业就需要一套高精度的施肥系统把控施肥各个环节。本文提出并设计了一套包含配肥子系统、混肥子系统、排肥子系统以及喷洒子系统的高精度施肥系统,用于控制施肥流程以实现施肥的精确性。
1 系统需求分析
本系统从实际应用出发,根据农田的基本状况人工输入化肥的配比方案,系统根据配比方案精确配制化肥,并使配置完成的液态化肥与稀释液在喷出前实现均匀混合,在区域内进行精准喷洒。综合考虑之后系统功能需求如下:
(1)根据配比方案精确配肥;
(2)已配肥料与稀释液均匀混合;
(3)单位时间内对排肥量进行控制;
(4)区域内精确喷洒。
2 系统设计
2.1 系统构成
本系统主要由配肥子系统、混肥子系统、排肥子系统以及喷洒子系统组成,系统构成如图1所示。

图1 系统结构
2.2 系统功能概述
配肥子系统:配肥子系统根据接收的配比方案,精确配制所需的液态化肥。通过计量泵等器件使液态化肥的配制更加精确,系统内置的压力传感器能够检测化肥原液的剩余量,反馈化肥原液的剩余信息。
混肥子系统:混合子系统将已经配制完成的液态化肥进行进一步稀释,以达到化肥喷洒要求。混合系统采用SK型静态混合器对液态化肥与稀释液进行均匀混合。
排肥子系统:排肥子系统主要由控制电路、驱动器、步进电机等设备组成,控制电路用于接收排肥信息并计算出相应的电脉冲信号传输至驱动器,驱动器根据电脉冲信号驱动步进电机,最后由步进电机完成排肥。
喷洒子系统:喷洒子系统实现液态化肥的精确喷洒,所采用的内螺纹喷头可以根据泵出的压力改变液态化肥的雾化状态。
3 系统设计
3.1 配肥子系统设计
配肥子系统主要由计量泵、空压机、三通电磁阀、单向阀、流量计、压力传感器和搅拌装置组成。当系统接收到配比方案后,根据各种肥料所需浓度计算出对应的比例。配肥流程如图2所示。

图2 配肥流程
计量泵从肥料原液罐中吸取化肥原液,由于一般化肥原液的浓度较高,用量相对较少,采用计量泵吸取的方式可以更加精准控制所需肥液。通过压力传感器(如图3所示)实时检测不同肥料原液的减少量,并使其始终与计算的比例保持一致,从而保证肥料的精准配比。使用单向阀可以防止原液回流,使原液经过流量计进入混合罐。三通电磁阀的进口分别接计量泵和空压机,出口接单向阀。当计量泵停止吸取肥料时,关闭三通电磁阀与之相连的接口,打开与空压机相连的接口。将压缩气体送入管道,高速流动的气体可以将积累在运输管道内的肥料原液吹落,提升配肥的精确性。为使不同的肥料原液充分混合溶解,在混合罐中使用搅拌装置对混合肥料液进行充分搅拌。流量计可以提供肥料流量参量的准确数值,使得系统在配肥过程中可以做出合理的判断与调节,从而通过调整计量泵的频率实现优良的控制。当压力传感器检测到原液余量不足时,系统能够及时提醒使用人员对原液进行补充。

图3 压力传感器及原理
3.2 混合子系统的设计
3.2.1 混肥子系统原理
国内静态混合器按照其管内固定部件的结构分为5种类型:SV型(用V型波纹片)、SL型(30°角组合金属板)、SK型(扭曲叶片)、SX型(45°角组合金属板)和SH型(双孔道及180°左、右旋单元),每种静态混合器都有着不同的适用范围。如图4所示,SK型静态混合器内部固定部件采用多个方向相反的螺旋结构,该设计在管道内留有较大的空隙,不易堵塞,因此适合多种不同粘度的化肥混合或稀释。当化肥通过SK型静态混合器进行混合或稀释时,化肥在混合器中会周期性改变流动方向以实现良好的径向混合或稀释效果。

图4 SK型静态混合器
本系统采用的化肥均为液态化肥,需要在混合罐内通过混合器对液态化肥进行稀释并均匀混合,考虑到液态化肥的介质特性、静态混合器的易操作性和静态混合器对液态化肥的混合效果,选用SK型静态混合器进行液态化肥的混合和稀释。当化肥配比完成并注入混合罐内后,系统驱动直流水泵组中的水泵将液态化肥抽取出来并经过SK型静态混合器后重新注入混合罐中。因直流水泵流量可达80 L/h,因此直流水泵仅需约10 s即可将混合罐内的化肥和稀释液混合均匀。
3.2.2 化肥稀释倍数计算
在化肥的实际使用过程中,不能将配制好的化肥直接喷洒在农作物表面,而是要把高浓度的化肥加稀释液稀释成浓度较低,适合农作物使用的低浓度化肥,化肥稀释可用以下经验公式计算:
稀释倍数=原化肥液浓度/所需化肥液浓度 (1)
如要将20%的化肥液稀释成0.02%的化肥液,应加稀释液的量为20/0.02=1 000倍,具体的化肥浓度与稀释倍数换算见表1所列。
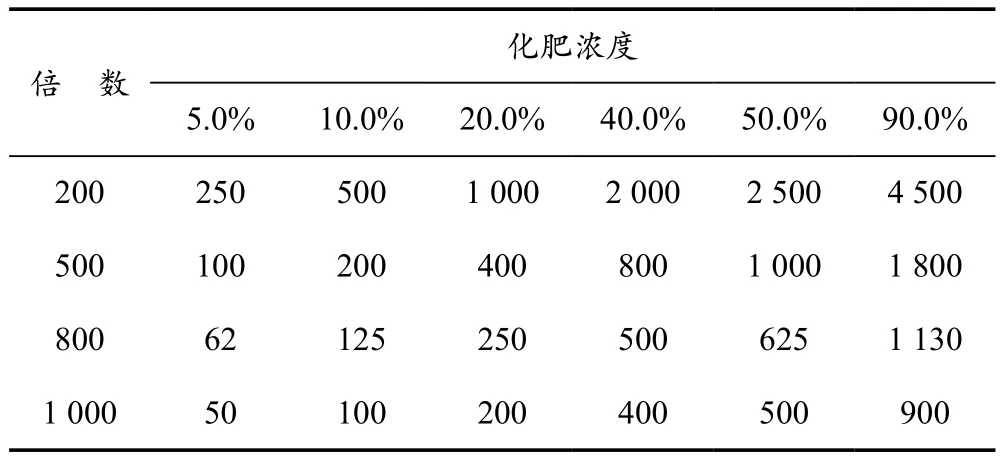
表1 化肥浓度与稀释倍数换算表
3.3 排肥子系统设计
3.3.1 排肥子系统控制原理
排肥子系统主要由单片机控制电路、驱动器、步进电机及排肥设备组成。本系统需要根据输入的单位时间排肥量,将信息输入单片机控制电路,经运算得出所需的电脉冲信号。将此脉冲信号输送至步进电机驱动器,控制步进电机变速转动以控制单位时间的排肥量。控制电路如图5所示。

图5 排肥系统电路
3.3.2 步进电机驱动器及步进电机
步进电机驱动板具有驱动步进电机、调整步进电机状态的作用。本系统采用kamoer公司出品的步进电机驱动器,通过通信总线RS 232调节步进电机的转动速度。
本系统采用kamoer公司出品的KCM-S403型步进电机,通过改变输入的电脉冲信号频率来调整步进电机的转动速度,由步进电机的转轴带动排肥设备转动,以完成排肥。一般情况下,电脉冲信号频率越大,步进电机的转动速度越快,排肥量越大;反之,电脉冲信号频率越小,步进电机的转动速度越慢,排肥量越小。
3.3.3 排肥量计算
本系统使用的步进电机泵的管内径为=3 mm,支撑角度=60°,泵壳圆周截面内圆直径=5 cm,滚轮直径=4 mm;根据式(2)可以估算得出每旋转角度步进电机泵输送的液态化肥量约为:



步进电机泵输送体积为的化肥所需时间可使用式(4)计算:

式中,为旋转时间(s)。
3.4 喷洒子系统设计
本系统采用顶部喷淋装置实现施肥功能。喷淋采用内螺纹雾化喷头(如图6所示),该喷头能反映高流速烟气下化肥的雾化液滴粒径尺寸和分布特点。工作过程中可承载水量为1.0~2.5 kg,喷洒直径最大可达1 m。为做到精确喷洒,每个花卉培养位置均位于各雾化喷头的正下方,因为为封闭环境,所以无需考虑风力对雾化后水雾的影响。本系统通过输入的位置信息确定开启喷头,花卉上方的雾化喷头阀门打开,配置完毕的液态化肥被步进电机泵至雾化喷头,从而实现喷洒。喷头内部构造不同,在调节旋钮松紧程度统一的情况下,通过控制步进电机泵的压力输出控制雾化喷头喷口处的雾化状态。
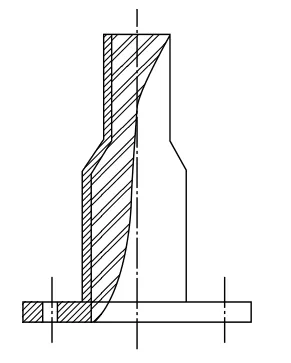
图6 内螺纹雾化喷头
压力和流量存在如下近似关系:

式中:和是第一状态时的压力和流量;和是第二状态时的压力和流量。
喷头的雾化粒径及雾化角的范围与压力及流量的关系见表2所列。

表2 雾化粒径及雾化角与压力及流量的关系表
喷洒装置如图7所示。随着压力的增大,喷头流量增大,雾化液滴的平均粒径逐渐减小,并且随着压力的增大,雾化粒径分布的范围逐渐变窄;反之,随着压力的减小,喷头流量减小,雾化液滴的平均粒径逐渐增大,雾化粒径分布的范围逐渐变宽。即压力大,小粒径液滴所占比例大;压力小,大粒径液滴所占比例大。

图7 喷洒装置
4 结 语
传统的施肥方式对人工依赖性极高,不仅提高了施肥的人力成本,更不能精确把控施肥流程,从而导致化肥利用率低下、环境污染严重以及农作物产量下降。基于此,本系统设计了配肥子系统、混合子系统、排肥子系统以及喷洒子系统。系统通过对化肥配制、混合、喷洒等方面的严格把控,精确控制液态化肥的施肥流程,从而实现高精度施肥。
目前,本系统不能根据实际的环境状况分析得出化肥的配制与施肥方案,而是需要人为输入控制信息实现施肥。为此,下一步将研究针对土壤情况及自然环境状况的信息采集系统,并根据采集的信息计算合理的化肥配置与施肥方案,实现智能控制。
