移动网络环境下的船舶异构网络定位算法
2022-10-19李静
李静
(1.河南大学 濮阳工学院,河南 濮阳 457000;2.濮阳职业技术学院,河南 濮阳 457000)
0 引 言
近年来移动通信网络发展速度明显提升,多类型无线接入技术层出不穷,根据相关调查资料显示,已有的无线接入技术的类型分为局域网、城域网、广域网等。目前中国与各国的贸易往来频率逐渐增大,船舶之间通信质量需求越发显著,单一的网络对目前船舶应用而言,存在供不应求的问题。异构网络的出现,可保证移动网络环境下船舶通信的间断概率明显变小。多种无线接入网络融合应用即为异构网络,此类网络应用下,就算某种接入技术发生异常问题不能正常传输信息,其他接入网络便提供信息服务,保证网络服务的无缝衔接。
无线定位技术属于移动无线网络的核心技术,和同构网络对比可知,异构网络的信标节点数目较多,对定位观测量信息的检测范围更广,定位精度更高。为此,目前船舶通信网络也主要采用异构网络通信技术,用于船舶的无线定位任务中。无线定位主要通过异构网络未知节点定位技术完成,目前,针对异构网络定位问题的研究已有很多,钱开国等使用信标节点与未知节点之间的距离,实现网络定位,但信标节点数量对定位精度存在一定影响,具体影响需深入分析,以此设置合理的信标节点;李鹏等使用鸡群算法求解定位无线传感器网络未知节点坐标,该算法在实验中被验证具有较好的定位能力,但是定位区域尺寸对其定位精度存在一定影响。
在已知研究成果基础上,本文提出移动网络环境下的船舶异构网络定位算法。该算法考虑定位区域尺寸对网络定位结果的影响、基站位置存在的固定性,在锁定未知节点位置区域基础上,通过估计基站与未知节点距离的方式,定位未知节点坐标,并引入改进遗传算法,校正定位误差,提高定位精度。
1 船舶异构网络定位
1.1 基于Bounding Box 算法的异构网络未知节点位置区域锁定方法

其中:x,x是第个节点横坐标的最小值与最大值;y,是第个节点纵坐标的最小值与最大值。
若把船舶异构网络通信范围看成内接矩形的Bounding Box,便锁定异构网络未知节点位置区域,详情见图1。
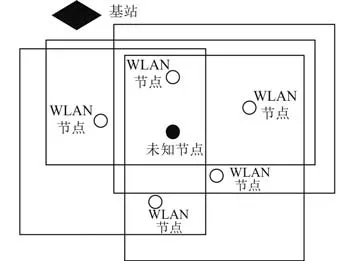
图1 异构网络未知节点位置区域锁定Fig.1 Unknown node location area locking in heterogeneous network

式中,是整数。
如果的数值是2,那么未知节点处于信标节点,,的交集 区域中。
1.2 基于改进遗传算法的船舶异构网络定位方法
1.2.1 基于TOA 测距的基站与未知节点距离测量


式中,为信号传输速度。
此测距方式下,如果未知节点的晶体振荡器输出信号执行倍频处理后,其脉冲频率为,那么它的脉冲周期为:

如果信号传播的时钟周期是,那么未知节点信号传输时间为:

式(5)是基于理想状态中计算的信号传输时间,但现实晶体振荡器对温度的敏感性较高,输出的脉冲存在频率偏移问题,则实际的脉冲频率是=+Δ,Δ表示属于频率偏移随机量。实际脉冲周期为:

如果未知节点信号传输至基站时,实际抵达时间是,那么信号传输速度为:

现实应用时,设置基站获取未知节点传输的无线信号时,脉冲频率是,属于标准值,那么未知节点信号传输时间实测值为:

综上所述,结合基站与未知节点的距离,使用基站坐标与距离相减,便可估计未知节点的所在位置 θ。
1.2.2 改进遗传算法的异构网络定位误差校正方法
结合测量的未知节点位置θ,考虑到异构网络无线设备晶体振荡器的频率漂移会导致未知节点信号传输时间和实测信号传输时间并不一致,此时未知节点定位结果θ存在偏差。为此,多次测量θ之后,使用基于改进遗传算法的异构网络定位方法,将多次测量的基站与未知节点距离值设成遗传算法的初始群体,通过改进遗传算法,校正测量误差,实现未知节点的高精度定位。定位流程如图2 所示。
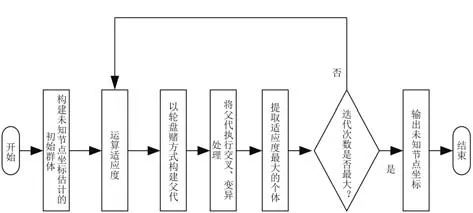
图2 基于改进遗传算法的异构网络定位方法Fig.2 Heterogeneous network location method based on improved genetic algorithm
1)运算未知节点坐标群体θ的适应度值,结合适应度值将未知节点坐标群体执行轮盘赌处理,构建未知节点坐标的父代群体,轮盘赌处理方法属于遗传算法常用选择方法,操作较为简单,可结合未知节点坐标群体θ中,某个未知节点坐标被选择的概率和适应度存在关联这一标准,选择代表最优未知节点坐标的个体,被选择概率主要通过适应度判断,适应度较高,则被选择概率较大。
为了提取可用于构建父代群体的个体,必须执行多轮选择,选择时,构建一个取值区间是0~1 的随机数,把此随机数设成筛选依据。
2)使用式(9)执行交叉处理,将未知节点父代群体以交叉的方式,构建新的个体(,):
式中:是时刻;,依次是未知节点所在位置的横坐标与纵坐标;δ是亲近系数,取值区间是0~1,可用于判断交叉后子代和父代个体之间亲近度;X,Y依次是+1时刻未知节点坐标个体的坐标。
3)将交叉处理后未知节点坐标群体,通过非一致性变异算子执行变异处理,便可获取子代群体。
4)运算子代群体里全部个体适应度,提取最大适应度所属的异构网络未知节点坐标个体,此个体位置就是最终定位结果。
5)运算定位误差,分析改进遗传算法收敛条件:如果迭代次数为最大值,便可结束收敛,输出定位结果,反之回到步骤1)再次定位。
2 实验结果与分析
为分析本文算法的应用效果,设置船舶异构网络模式是单基站WCDMA+WLAN 网络。此类异构网络应用下,单基站WCDMA 网络、WLAN 网络的覆盖半径依次设成1 000 m,400 m。基站坐标是(700 m,300 m),将其设成,未知节点坐标设成(80 m,60 m),将其设成。目前WLAN 网络存在的信标节点数目是4 个,4 个信标节点均可以和未知节点通信,信标节点的位置依次是1(20 m,30 m),2(110 m,70 m),3(30 m,90 m),4(80 m,25 m)。
本文算法首先使用基于Bounding Box 算法的异构网络未知节点位置区域锁定方法,提取未知节点位置所在区域,结果如图3 所示。图中,异构网络未知节点位置区域的4 个顶点坐标依次是(30 m,10 m),(30 m,90 m),(85 m,10 m),(85 m,90 m),边长1、边长2 依次是80 m,55 m。
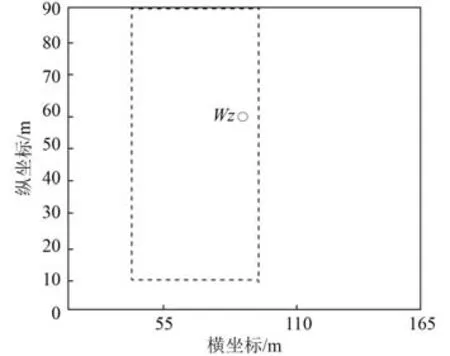
图3 异构网络未知节点位置区域锁定结果Fig.3 Area locking result of unknown node location in heterogeneous network
本文算法对船舶异构网络未知节点定位时,迭代次数与定位精度、定位耗时存在直接联系,定位精度、定位效率影响船舶的定位应用效果,定位效率还对网络节点的使用寿命存在影响,因为网络定位要求算法在应用时需要保证消耗较少的能量,才可保证网络节点寿命不受损,如果定位耗时较多,消耗能量较多,便会导致节点寿命受损。为此,需要设置合理的迭代次数,以此保证定位精度与定位效率满足需求,从而实现异构网络定位的合理操作。则迭代次数与定位精度、定位效率的关系如图4 和图5 所示。由图可知,迭代次数是4 时,本文算法对船舶异构网络未知节点定位时,定位精度最高,超过0.95,定位耗时最少,仅有0.2 s。为此,在后续应用时,设置迭代次数为4。
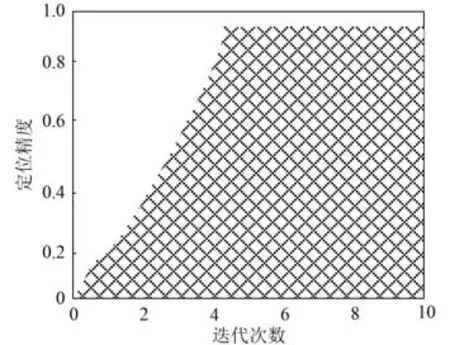
图4 迭代次数与定位精度的关系Fig.4 Relationship between iteration times and positioning accuracy
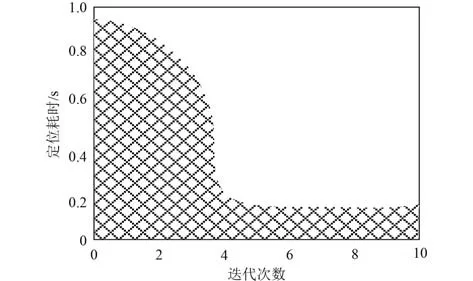
图5 迭代次数与定位效率的关系Fig.5 Relationship between iteration times and positioning efficiency
基于迭代次数为4 的条件下,本文算法对船舶异构网络未知节点定位结果示意图如图6 所示。可知,本文算法对船舶异构网络未知节点定位结果与图3 相符,代表定位结果正确。
图7 为对一个未知节点的定位效果,而异构网络环境下,还会存在多个未知节点需定位的情况,则本文算法应用下,多个未知节点定位效果同图6 一致,本文算法对多个未知节点的定位结果均与实际位置相符,说明本文算法在移动网络环境下,对船舶异构网络的定位精度可满足应用需求,解决船舶异构网络的定位问题。
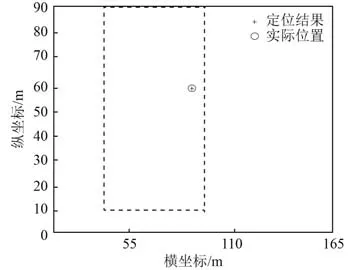
图6 船舶异构网络未知节点定位结果Fig.6 Location results of unknown nodes in ship heterogeneous network
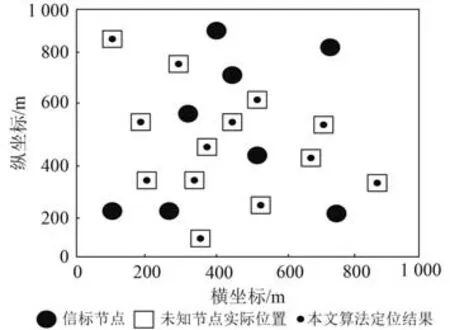
图7 多个未知节点定位效果Fig.7 Effect of locating multiple unknown nodes
3 结 语
移动网络环境下的船舶异构网络定位问题,是船舶无线定位应用的核心问题。本文研究了一种移动网络环境下的船舶异构网络定位算法,并通过实验验证该算法的应用效果,实验验证结论显示:
1)迭代次数是4 时,本文算法对船舶异构网络未知节点定位时,定位精度最高,定位耗时最少,所以为了保证本文算法对异构网络定位效果,将迭代次数设成4。
2)本文算法对单个未知节点、多个未知节点的定位结果符合实际坐标信息,证实其定位结果可信。