多传感器融合的船舶轮机设备多发故障信号监测研究
2022-10-19赵云博
赵云博
(江苏海事职业技术学院,江苏 南京 211170)
0 引 言
船舶系统中轮机设备至关重要,直接影响船舶航行安全。及时检修船舶轮机设备,可避免重大安全事故发生,而影响船舶检修效率与精度的因素是多发故障信号监测结果。多发故障代表同一设备出现同一故障的次数较多,及时发现多发故障,可有效防止严重故障问题。为此,需研究故障信号监测方法。李汶骏等利用混合核的核主元分析方法,完成轮机故障监测,该方法可有效在线监测轮机故障,具备较优的实用性。王崇宇等利用深度卷积神经网络,实现轮机故障监测。该方法可有效监测轮机故障,监测精度高于95.47%,具备较优的鲁棒性。上述2 种方法完成故障监测均依赖历史数据,具备一定的局部性与不确定性,易出现故障监测结果错误情况。多传感器融合是充分融合多个传感器资源,弥补单个传感器采集信息存在的冗余与缺失问题,解决信息采集的局部性与不确定性问题,为故障信号监测提供更为精准的数据支持。为此研究多传感器融合的船舶轮机设备多发故障信号监测方法,实现多发故障信号监测。
1 船舶轮机设备多发故障信号监测
1.1 船舶轮机设备多发故障信号特征提取
利用多个传感器采集船舶轮机设备运行信号,令单个传感器采集的船舶轮机设备运行信号为(),其中,采样时间为;分解()获取+1个本征模态函数x(),即经验小波变换分量,()的计算公式如下:
其中:为信号本征模态函数编号。
将()划分为个不间断的区间,各小波滤波器间的边界是 ω,第个分割区间Λ为:
利用经验小波变换提取船舶轮机设备多发故障信号特征,具体步骤如下:
1) 利用尺度空间法划分()的频谱,并分解(),获取x(),=1,2,3,…,+1;
2) 以方差为指标,再次分解首个(),以()与邻近2 个经验小波变换分量方差未超过0.01 为,此时获取()内的趋势信号();
3)在()内剔除(),获取新的船舶轮机设备运行信号,并分解该信号。求解各x()与()相关系数r,公式如下:

在r内选择最大值,同时获取r内全部超过0.85A 的极大值数量,数量最多相应的原始本征模态函数,利用重构该本征模态函数,完成船舶轮机设备多发故障信号特征提取。
1.2 单个传感器的船舶轮机设备多发故障信号监测
归一化处理单个传感器的船舶轮机设备多发故障信号特征,并输入径向基函数(radial basis function,RBF)神经网络内,输出单个传感的船舶轮机设备多发故障信号监测结果。RBF 网络输入与输出向量间的映射关系为:

RBF 的第个隐藏神经元的高斯函数θ,θ的中心与宽度是 ϖ,σ。第个输出节点的输出为:
其中:为隐藏神经元数量;η为可调节因子;w为权值。
通过式(7)可获取单个传感器的船舶轮机设备多发故障信号监测结果。
1.3 基于多传感器融合的多发故障信号检测
以单个传感器的船舶轮机设备多发故障信号监测结果为基本概率分配函数,利用基于证据理论的多传感器融合方法,融合单个传感器的船舶轮机设备多发故障信号监测结果,获取最终的船舶轮机设备多发故障信号监测结果。多发故障信号监测原理为:以输出的单个传感器多发故障信号监测结果为基本概率分配函数,通过组合规则展开运算,按照融合结果完成多发故障信号监测。多传感器融合的船舶轮机设备多发故障信号监测框架是 Θ;Θ内包含多发故障信号监测的基本命题;令随机命题属于幂集 2,则在 2内存在:

其中:∅为空集;()∈[0,1],⊂Θ,为基本概率分配函数;y(A)的为概率赋值,代表船舶轮机设备多发故障信号监测证据支持的发生程度。若是 Θ的子集,同时()>0,那么是船舶轮机设备多发故障信号监测证据的焦元,全部焦元集合是核。证据是通过船舶轮机设备多发故障信号监测证据体(,())构建而成,通过(,()) 设置 2内的信任函数:2→[0,1] 与似真度函数:2→[0,1],公式如下:
式中:()代表对于的支持程度,()代表不否定的程度。
多传感器的船舶轮机设备多发故障信号监测结果的组合规则为:,为 Θ中的信任函数;与之相应的基本概率分配函数为y,y;船舶轮机设备多发故障信号监测证据的焦元为,,···A,,,···C;证据间的信任冲突度为:

其中:A′,C′为 第个与第个焦元。
因此,组合后新的基本概率分配函数=⊕如下:
其中,为组合后多传感器融合的船舶轮机设备多发故障信号监测证据的焦元。在≠1情况下,()仅存在一个确定的概率赋值;在=1情况下,说明与完全矛盾,不可组合。
以融合后的为船舶轮机设备多发故障信号监测的判断依据,以设置阈值的方式,完成多发故障类型信号监测。
2 实验结果与分析
以某船舶轮机设备为实验对象,该轮机主要包含主调节阀与高、低压汽轮机等设备,结构如图1 所示。利用本文方法监测轮机设备多发故障信号,在轮机的前后两端各安装1 个振动传感器,用于采集船舶轮机设备运行信号,设置轮机设备共存在2 种类型的多发故障,分别是不对中与共生松动。
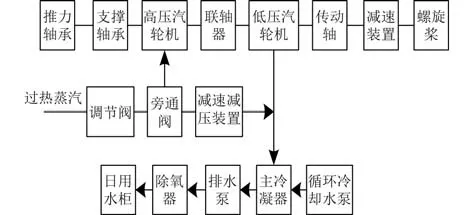
图1 船舶轮机结构图Fig.1 Structural diagram of ship turbine
利用2 个传感器采集该船舶轮机设备运行信号,以船舶轮机设备存在不对中故障时为例,2 个传感器的采集结果如图2 所示。根据图2 可知,本文方法可有效采集船舶轮机设备运行信号,2 个传感器采集的结果虽存在微小差距,但变化趋势大致相同。
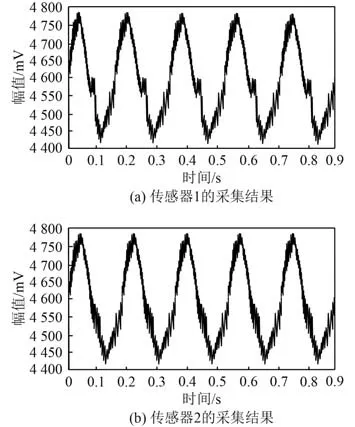
图2 船舶轮机设备运行信号采集结果Fig.2 Acquisition results of operational signals of marine turbine equipment
利用本文方法在船舶轮机设备运行信号中,提取船舶轮机设备多发故障信号特征,以传感器2 采集的信号为例,多发故障信号特征提取结果如图3 所示。根据图3 可知,本文方法可有效分解船舶轮机设备运行信号,清晰呈现设备运行信号的波形图,提取不同频率区间的多发故障信号特征,为后续多发故障信号监测提供数据支持。
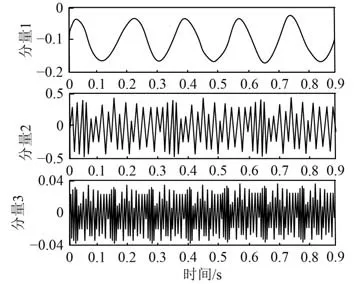
图3 多发故障信号特征提取结果Fig.3 Feature extraction results of multiple fault signals
利用本文方法监测该船舶多发故障信号,监测结果如图4 所示。根据图4 可知,本文方法可有效监测船舶轮机设备多发故障信号,共监测到2 种类型的多发故障信号,分别是不对中与共生松动多发故障,与实际多发故障类型相同,说明本文方法多发故障信号监测精度较高,可精准监测船舶轮机设备多发故障信号。
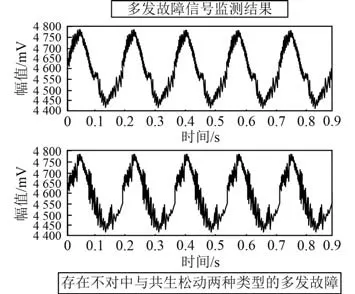
图4 船舶轮机设备多发故障信号监测结果Fig.4 Monitoring results of multiple fault signals of marine turbine equipment
3 结 语
船舶故障检修属于确保船舶安全航行的关键,船舶检修时,需要依据多发故障信号监测结果,实现快速、精准维修。为此研究多传感器融合的船舶轮机设备多发故障信号监测方法,精准监测多发故障信号,确保维修人员可尽早发现船舶轮机设备存在的各种故障问题,保证船舶航行安全。
