基于车载中控系统的辐射环境监测车设计
2022-10-18谭炜周建斌方方
谭炜,周建斌,洪 旭,方方
(成都理工大学 核技术与自动化工程学院,四川 成都 610059)
核事故对核电的发展产生巨大影响,核应急辐射环境监测工作是核应急工作的重要组成部分,车载移动监测系统具有机动能力强、反应迅速、获得辐射环境强度分布数据等特点,已成为辐射环境安全监管的重要手段[1]。
美国RSI 公司设计的RS-700 是完整的一套伽玛射线放射性探测和监测系统,系统内置了GPS 接收机,使用运行在PC 端的RadAssist 测量软件进行控制、监控和记录数据。加拿大 PEI公司设计的PGIS-2 系列便携式伽玛光谱系统,用内置GPS 导航,通过手持平板蓝牙与设备通信,该设备体积小,可以通过手持或应用在航空伽马能谱领域。加拿大SAIC Exploranium 公司设计的GR-460 车载放射性全谱测量系统,将包含4 L 的NaI 探测器放入车顶,一台512 道谱仪,内置GPS 接收机,使用一台军用笔记本电脑接收数据。核工业北京地质研究院研制了具有GPS 定位功能的CZ-256 型多道车载伽玛能谱测量系统,并及时应用于环境监测,取得了较好的效果。上述辐射环境监测车方案设计思路是将完整的重量级系统或轻量级安装在汽车上,布置单独的测量仪器。探测器接入车身后可充分使用车载系统的准确数据,如汽车行驶姿态,车载定位,速度,里程等[2-5]。
设计一台核辐射环境监测车。该设备包含六个一体式NaI(TI)探测器,可以对环境中伽马射线进行探测。各个探测器通过CAN 总线接入车辆的中控系统。基于车辆中控系统,编写辐射环境监测软件,实现各探测器数据实时处理。结合车辆行车定位功能,标记实时辐射测量结果,最后绘制区域辐射水平效果图。
1 方案及设计
核辐射监测车基于现有的车辆安装多个探测器,通过总线接入到汽车网络,修改当前车载多媒体系统软件完成。设计过程包含探测器分布、CAN 总线接口、软件设计、数据处理四个部分。
1.1 探测器布置
如图1 所示为探测器安装图,在一台车上放置6 个一体式探测器形成多方向探测,顶部安装4 个较小体积探测器,通过行李架安装在顶部方向分别朝左前,右前,左后,右后,可探测4 个方向能谱,可探测不同视角,用于探测距离较远,容易被阻挡的伽马射线。在后备箱中安装两个大体积一体式探测器,增加探测效率,用于探测地面的伽马能谱。每个探测器可以独立工作,各个探测器通过四芯线缆并联,探测器由中控系统提供5 V 供电,通过CAN 总线接入到车载多媒体系统。如需要增加探测器,只需要将新加入的探测器的5 V 供电及CAN 总线并联到系统即可。
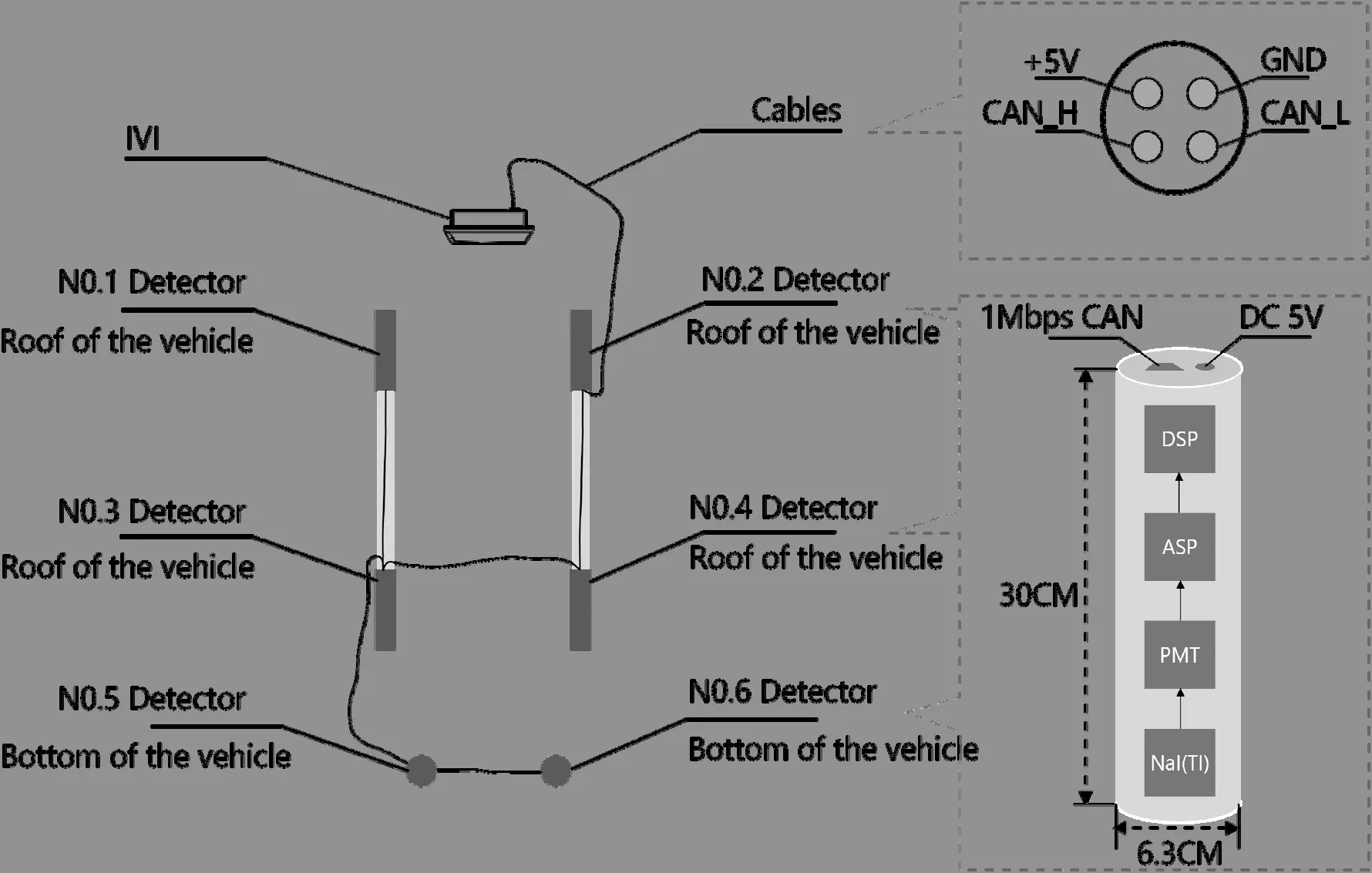
图1 探测器安装图Fig.1 Detector installation diagram
探测器选用四川新先达测控技术有限公司生产的一体式智能探测器。每个探测器内置数字多道脉冲幅度分析器(DMCA),能够生成1 024 道能谱数据,并通过1 Mbps 速度的CAN总线接口输出[6]。探测器内置计数及缓存,总线的延时不会引起死时间及同步问题[7]。探测器工作电压为5 V,平均电流约为200 mA,6个探测器同时工作功耗约6 W,车载中控电源系统满足探测器的供电需求。探测器工作温度-20~80 ℃,外壳为铝合金属,IPX8 级防水,能在环境较苛刻的条件下完成探测工作。探测器为圆柱形,长30 cm,直径约为10 cm,便于在汽车上安装,可以满足车载监测系统的探测需求。
1.2 CAN 总线接口
探测器数据通过CAN 总线接入到车身网络中,车身CAN 总线在数据传输过程中更加稳定可靠,使探测器与整车成为一个整体。
在汽车领域中,车内有多个电控单元,如引擎控制单元,传动控制单元,安全气囊,ABS等都影响汽车正常行驶安全性。这些模块单元都是单一的子系统,模块之间通过CAN 总线互连,形成汽车CAN 网络,网络分为不同的总线分支,每个分支连接到汽车网关模块,降低车内电子系统部件复杂度,增加模块之间通信的可靠性[8]。
探测器通过车载高速CAN 总线接入到娱乐总线中,总线速度为1 Mbps。探测器与车载多媒体系统通过私有CAN 协议进行数据交互,车载网关不处理转发该CAN 数据,不影响整车其他网络总线的数据,如图2 所示。
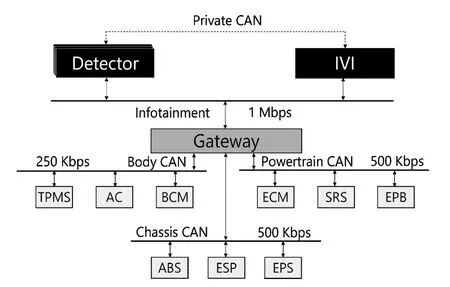
图2 汽车CAN 网络Fig.2 Vehicle CAN network
1.3 车载中控系统平台
汽车多媒体系统与传统的电脑、PC、手机等不同,其整个系统设计需要符合汽车规范的认证标准。在硬件上需要使用符合汽车规范的电路及电子器件。在软件上使用高度定制的软件系统,在安全规范中符合汽车规范安全等级认证,图3 为系统框图。

图3 车载多媒体系统框图Fig.3 Architecture of IVI
设计过程可以分为两个板块:
(1)MCU 板块。MCU 控制着整个硬件系统各个状态,管理电源,与各个外设通信。如方向盘按键,收音机控制,总线数据处理等。其中CAN 数据模块由CAN 控制器与CAN 收发器组成,用于接收CAN 总线上的所有数据。MCU 运行RTOS 系统,在该系统中,运行多个任务,如CANTask、PowerTask,WakeupTASK,InputScanTASK,BUSTask 等,对CAN 数据进行解析及处理运行在CANTask 任务中,分为私有CAN 处理,UDS 诊断及网络管理。在私有CAN 数据处理中,通过CAN_ID 来识别数据来源,以区分是来自探测器还是车身其他单元。数据与CPU 交互放置在BUSTask 中,该任务会检查缓存区是否有数据需要发送,如果有,将数据通过内部总线发送并清空缓存区域。
(2)CPU 板块。它是整个系统的核心模块,用于人机交互及复杂逻辑运算。中控系统拥有稳定的软件系统环境,可获取与汽车相关的数据,如汽车速度,行驶里程等车身数据。内置车载GPS 定位模块,可结合车身数据计算汽车的姿态及位置。CPU 运行Android 系统,该系统属于高度定制的操作系统,移除部分标准Android 服务,增加了车机上所需的服务及相应的API[9]。车机上运行着多个应用进程,如蓝牙,收音机,视频,图片,倒车后视,设置等。
2 软件设计
软件设计主要工作是对当前稳定的软件系统增加或修改功能,现有的软件系统架构如图4 所示。软件设计主要可分为两个部分。
2.1 数据传输
如图4 所示,对探测器数据获取、解析、传输是由MCU 完成的。MCU 运行着多个任务,对私有CAN 数据的处理在CANTask 中,在该任务逻辑中增加6 个测器探测器数据通道,收到数据后先解包,再进行组包,最后放到发送缓存中,BUSTask 检测到有数据需要发送后,会及时将缓存的数据发送到CPU。
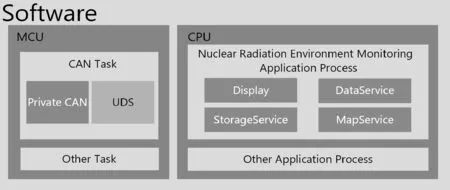
图4 车载多媒体软件框图Fig.4 Software architecture of IVI
探测器每次收到数据请求后,才会将1 024道能谱数据返回多媒体系统软件。总线上一次只能传输一个探测器数据,系统对6 个探测器通过轮询请求的方式依次获取数据。
探测器内置的DMCA 已将数据进行组包。CAN 总线传输一帧数据为8 个字节,探测器每次返回共258 帧数据,共2 064 字节,其中8个字节为帧头部,8 个字节为测量时间,2 048字节为1 024 道数据。
MCU 收到探测器的数据,将连续的258 帧数据放入到缓存中。为保证每次数据快速传输,防止数据延时,不影响车机其他功能的正常使用,系统规定MCU 向CPU 每次最多只能发送256 个字节的长度。探测器一次数据返回为2 064 字节,超过了单次向CPU 发送的数据长度,需要对数据进行组包及解包,本方案通过自定义协议进行组包,组包通过包头编号来确定,一共17 个数据包,解包时通过包头编号进行数据还原,如图5 所示。组包完成后,将17个数据包依次放入发送缓存中。

图5 数据传输过程Fig.5 Data transfer process
2.2 数据处理及显示
数据的显示及处理主要由CPU 完成,基于车载Android 系统设计一个新的应用程序,该应用包含一个显示层,多个服务层。
(1)数据服务通过调用系统接口获取数据,包括车载GPS 数据,汽车的速度、里程,探测器数据包等。根据协议对探测器数据进行组包,将6 个探测器数据放到系统缓存中。
(2)存储服务用于管理数据库,将测量时间、探测数据、GPS 数据实时写入本地数据库。为保证数据完整性,在系统开始采集后,数据服务及存储服务会一直在后台运行,即使用户切换到其他应用,数据仍会持续采集传输,保证整个采集过程数据不会丢失。测量完成后,可将数据库拷贝至U 盘,方便后期进行数据分析。
(3)地图服务通过调用第三方地图(百度地图)接口,在地图模式下进行地图绘制,轨迹绘制,形成分布图,在分布图中,系统会实时显示当前剂量率,当前剂量率K(单位:nGy/h)的计算方法为:

其中:T——测量时间,s;
dataij——第i个探测器j道计数值,剂量率与6 个探测器全谱计数率呈线性关系;
L——该线性关系一个系数,本文称之为剂量系数。
剂量系数可以在系统设置里面修改,当增加或者减少探测器时,剂量系数需要根据标定情况手动进行调整。
每隔1 分钟,系统会保存一个剂量率值K′(单位:nGy/h),K′的计算方法将公式(1)中的T=60,dataij为第i个探测器j道60 s 内的增长计数。并作为一个标记点显示在地图上。
(4)显示服务在测量模式下通过Android图形引擎绘制数据波形,可通过触摸手势对波形进行缩放、移动,直观的显示能谱图。
在测量模式下查看单个探测器详细能谱图中,系统收到某个探测器数据后,对数据进行分析处理。首先将1 024 道数据通过滤波去噪,其次进行曲线光滑,然后通过对称零面积变化法进行寻峰,从而自动判定峰位。可通过能量刻度判定峰位能量,达到识别核素的目的[10]。
测量软件与多媒体其他软件互不影响,用户在测量过程中可以随意切换多媒体娱乐系统其他软件与测量软件。
3 试验及功能
准备一台定制车辆,软件设计并测试完成后,将MCU 及CPU 系统软件打包,通过OTA升级将车辆IVI 系统软件更新成含有定制程序的系统。升级完成后,检查系统软件版本,确保软件正确。
将各个探测器设备安装在指定位置,通过线缆将各个探测器接入到汽车CAN 网络中,车辆ACC 上电后,中控系统自动启动,通过点击系统操作系统主页菜单中的辐射监测系统入口图标,启动辐射监测系统程序,进入系统主页。如图6 所示。
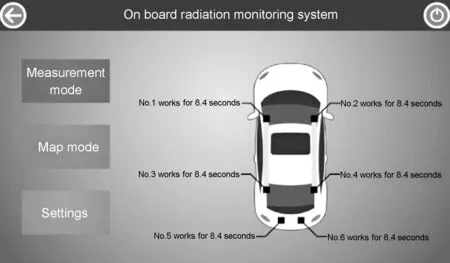
图6 系统主页界面Fig.6 System home page interface
在系统主页工作界面上,左侧三个菜单分别进入测量模式,地图模式以及系统设置。右侧显示各个探测器的状态,可主动开启或关闭某个探测器,当系统正在工作时显示各个探测器的工作时间。整个系统界面分为导航栏和系统工作界面,导航栏用于控制各个页面的跳转,显示当前系统状态信息以及系统测量的开关。
主页上点击系统设置,进入系统设置界面,如图7 所示。由于系统的各个探测器为独立工作的探测器,每个探测器参数上存在一定的差异,对探测器参数设置上需要对每个探测器单独进行设置。左侧点击某个设备可以对单个设备进行设置,点击顶部的整车设置按钮可以对所有的设备进行相同参数的设置。

图7 系统设置界面Fig.7 System setting interface
准备一个已知活度的137Cs 和60Co 源,对NaI(TI)探测器进行能量刻度及效率刻度,设置能量刻度参数及效率刻度参数。并对各个探测器进行其他参数设置,主要包含调增益及偏置电压使探测器处于最佳工作状态、设置各个探测器的测量时间。返回主页,参数设置及车辆准备工作完成。
将车辆行驶至需要测试位置的起点处,车辆发动,进入系统,在主页上将6 个探测器全部打开,点击右上角开始测量按钮探测器开始工作。驾驶车辆按照规划路线行驶,系统将自动记录数据并存储到本地。
在行驶过程中,操作员点击测量模式,在一个界面中显示6 个探测器实时谱线概图,如图8 所示。由图可以看出各个探测器的谱线大致形状保持一致,各个谱线还有一定的差别,符合本底能谱的特性。点击各个概图后会弹出全屏窗口用于显示详细谱线图。
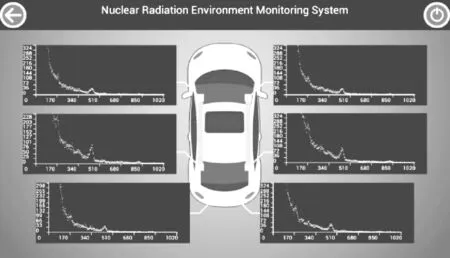
图8 测量模式界面Fig.8 Measurement mode interface
在详细普线图窗口中,系统通过谱线图自动识别峰所在位置,通过道值判定峰能量,将识别的核素显示在图中。
如图9 所示为龙潭工业园区域本地能谱图,由图可以看到在测量大约900 s 时,自动寻峰判定到440 道出现峰值,并识别其能量大约为1.46 MeV,判定为40K,在相应的峰上会显示出是何种核素。从系统识别的谱线图来看,属于天然本地放射性物质,与实际环境符合。
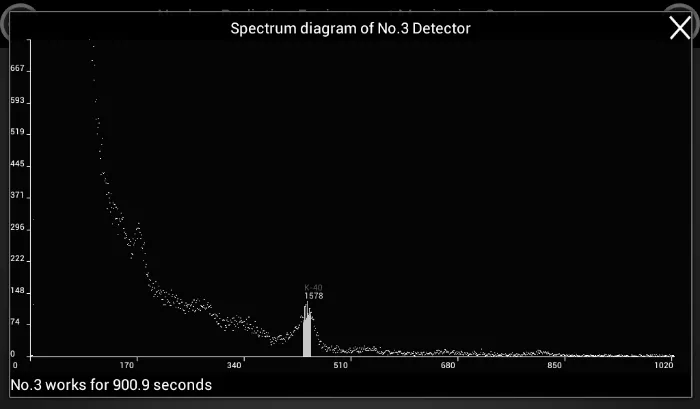
图9 测量模式探测器详细谱图Fig.9 Detailed spectrogram of measurement mode of detector
在行驶过程中,操作员点击地图模式,查看行车轨迹图,系统会根据一定时间间隔,统计该区域的剂量率(单位:nGy/h)。如图10 所示为龙潭工业园区某条轨迹路线及该段轨迹的剂量率。由于该区域无高浓度放射性物质,因此该路线各个区域剂量率值差距不大,符合当前城市道路环境。
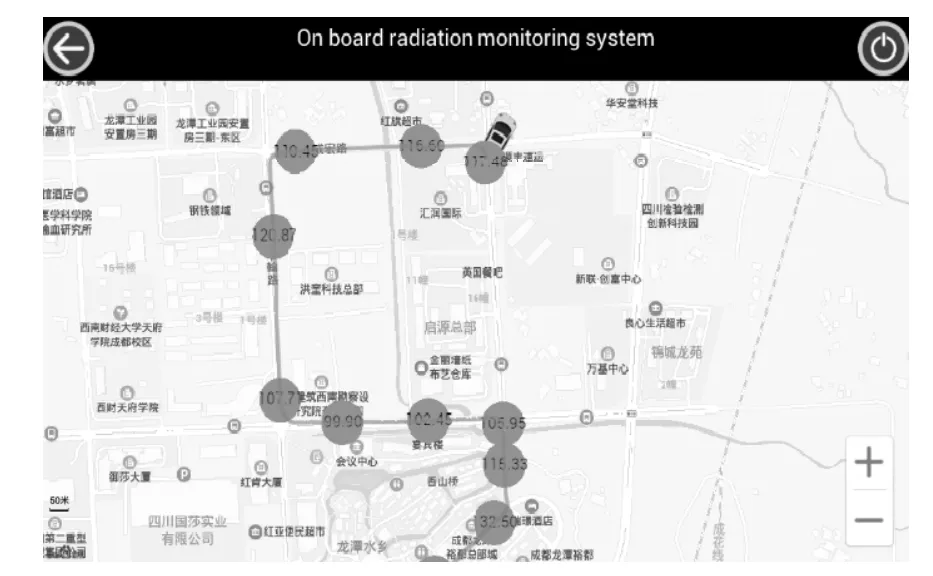
图10 地图模式界面Fig.10 Map mode interface
4 结论
本文所设计的车载核辐射监测系统探测器接口设计,能够将探测器布置在车上各个位置,通过CAN 总线将数据传输到汽车中控中,可以通过汽车的供电模块让探测器处于稳定的工作状态。
系统可以接入到车载CAN 网络中,通过私有CAN 协议与中控系统进行数据交互。定制后的软件系统可以正常在车载多媒体系统上稳定运行。数据总线稳定可靠。
在路试过程中系统及探测器稳定运行,系统可以正常显示环境中能谱图,并能自动识别峰位并判定是何种核素。系统能通过GPS,速度表,里程表显示准确的行车轨迹图,能在地图上标识出各个行车路线区域剂量率。
核辐射监测车探测器与汽车成为一个整体,探测器通过CAN 总线将数据接入到车载网络,利用车载多媒体系统进行数据处理,达到了预期的效果。本设计能进行辐射移动巡测,在核辐射环境及核安全领域有着重要意义。
致谢感谢成都理工大学及四川新先达测控技术有限公司周建斌、方方、洪旭、马英杰、万文杰、韩旭等在本系统中给予的建议及良好的测试条件。
