惯性导航技术在海上装备中的应用
2022-10-17邱千钧郝翎钧
邱千钧,郝翎钧,陈 轶
(1.海军驻北京地区军事代表局,北京 100854;2.海军研究院,上海 200436;3.海军研究院,北京 100161)
惯性导航技术既不需要外界输入信息,也不会对外界产生能量,是目前应用最广泛的自主式导航技术。基于牛顿运动学定律,惯性导航技术的基本原理是将安装于平台的加速度计用于测量其加速度,采用积分的方法对测量出的加速度累积,从而计算推导出平台的速度和位置。惯性导航技术的优点是:① 隐蔽性好;② 稳定性高;③ 噪声低;④ 全天候工作;⑤ 短期精度高;⑥ 数据更新快;⑦ 导航信息连续性好。其缺点是:① 初始对准时间长;② 长期精度不高;③ 没有时间信息。
对于惯性制导的导弹而言,制导系统的精度决定了其70%的命中精度;对于远程巡航导弹来说,惯导技术配合其他制导技术诸如星光导航技术、地图匹配导航技术等,能够使导弹航行数千千米以后依旧可以高精度命中目标;对于潜艇而言,其作战使命任务要求导航系统具有高度的隐蔽性,那么,惯性导航系统无疑是潜艇的最佳选择,也是目前适用于潜艇的最可靠导航系统。
因此,惯性导航技术在国防装备领域中占据十分重要的地位,是众多武器装备的基础性、关键性技术之一。本文分别从舰艇、水面水下无人系统以及水中兵器三个方面介绍了惯性导航技术在海上装备中的应用,并据此给出了惯性导航技术的研究展望与发展建议。
1 惯性导航技术概述
制约和影响惯性导航技术的因素有很多,主要归纳为两方面,分别是惯性传感器(主要包括陀螺仪和加速度计)和系统技术(主要包括导航算法、对准技术、标定与校准技术等)。对于惯性传感器而言,加速度计的技术相对成熟且精度较高,陀螺仪作为惯导系统的核心关键器件,制约着惯性传感器的精度水平,决定了惯导系统的整体性能;对于系统技术,会在后文根据不同的应用平台进行具体的介绍,在此不再赘述。
1.1 转子陀螺仪
转子陀螺仪主要原理是基于旋转质量的陀螺效应,按照支承方式可以分为滚珠轴承自由陀螺仪、液浮陀螺仪、挠性陀螺仪和静电陀螺仪等。
滚珠轴承自由陀螺仪是最基础最经典的陀螺仪。德国在二战期间将其装备于V-2导弹,为导弹指引航向定位打击,是陀螺仪在军事制导领域的初次应用;1950年左右,美国麻省理工学院为了降低支承轴的摩擦力矩,选择液体进行支承,研制出了液浮陀螺仪,达到了惯性级(小于0.01°/h)精度;20世纪60年代,飞机导航需求推动了挠性陀螺仪的问世,挠性陀螺仪采用挠性接头进行支承,精度和液浮陀螺仪几乎一致,但是其结构简单、成本低廉的特点使其广泛应用于导弹和飞机等众多平台;20世纪50年代提出了静电陀螺仪,在真空中选择静电支承,既消除了机械接触,又克服了气体阻力,几乎没有摩擦,精度很高,是转子陀螺仪的革新发展,主要应用于核潜艇以及远程飞机等长航时平台。
1.2 光学陀螺仪
光学陀螺仪的问世是惯性传感器技术发展的重大变革,其主要原理是萨奈克(Sagnac)效应,可以分为激光陀螺和光纤陀螺。
20世纪60年代,美国斯佩里(Sperry)公司率先制造出激光陀螺仪,经过长时间的发展,激光陀螺仪技术日渐成熟,精度也不断提高。2019年9月,美国陆军向Honeywell公司订购了价值三千多万美元的战术先进地面惯性导航装置,该导航系统采用的是激光陀螺技术;此外,美国海军与诺格公司签了2.1亿美元的AN/WSN-7舰载惯性导航系统的采购合同,要求2022年12月交付美国海军,AN/WSN-7导航系统所采用的也是激光陀螺技术。激光陀螺仪是美国军方的重要选择之一,广泛应用于舰艇、战车、导弹等军用平台。
20世纪70年代,美国犹他大学(The University of Utah)首次设计研制出光纤陀螺,光纤陀螺相比较于激光陀螺,成本偏低,精度更高,受到了民用市场的青睐和军方用户的高度重视。法国iXblue公司研制生产的Marins惯导系统,采用的就是光纤陀螺技术,Marins惯导系统装备于法国海军的“追风”级轻型护卫舰,目前,已超过650艘水面以及水下平台配置了该惯导系统。
1.3 微机电陀螺仪
微机电(Micro Electro Mechanical Systems,MEMS)陀螺仪的主要原理是利用微纳米技术测量科里奥利力,MEMS陀螺仪由于其成本低廉、体积较小、功耗不高、可靠性高,且易于批量生产的优势,受到了国内外的重点关注。
1987年,美国德雷珀(Draper)实验室顺利研制出MEMS陀螺仪,成了陀螺仪技术发展的重要里程碑。美国联合制导攻击武器(Joint Direct Attack Munition,JDAM)采用了Honeywell公司生产的HG1700 MEMS陀螺;Honeywell公司研制出的新型两轴MEMS陀螺GG5200已经取代了机械陀螺,装备于美国Stryker装甲车,其研制的三轴MEMS陀螺GG5300也成功装备于“全球鹰”无人机与M1艾布拉姆斯(Abrams)主战坦克;此外,美国BEI公司生产的QRS116高性能MEMS陀螺,也顺利装备于F-22猛禽战斗机;英国的海狼(Sea-Wolf)防空导弹和NLAW反坦克导弹(Next-generation Light Anti-tank Weapon)采用了SiRRS系列微机电陀螺。
1.4 半球谐振陀螺仪
半球谐振陀螺仪(Hemispherical Resonator Gyro,HRG)的基本原理是根据半球壳唇缘的径向振动驻波进动效应来测量基座旋转,主要有精度较高、可靠性高、稳定性强、寿命较长、噪声偏低等优点,具有广阔的发展前景。美国、法国、俄罗斯处于HRG研究的领先地位,并将HRG广泛应用于海陆空天地等多个领域,英国和日本也在近年来开展了对HRG的研究工作。
1965年,HRG的数学基础与理论模型建立,HRG逐渐吸引学者和企业的关注;1975年,美国海军航空系统司令部(Naval AirSystems Command,NAVAIR)开启了HRG的研发计划,美国德科(Delco)公司于1979年、1982年和1983年分别成功研制出Block10、Block20以及Block30三种型号的HRG;20世纪90年代,德科公司研制的Carousel-404惯导系统与HRG158Y集成,成功装备于汉莎航空的波音747飞机上,不仅运行时间长,平均位置精度高,而且全年没有发生任何故障;法国的赛峰集团于2018年研制出基于HRG的惯性导航仪ONYX,ONYX曾被誉为世界上最小、最准确和最可靠的纯惯性导航仪。
1.5 原子陀螺仪
随着量子技术的发展,原子陀螺仪的出现翻开了陀螺仪技术的崭新篇章,具有超高精度、体积小、可靠性强的显著优势,展现出了广阔的发展前景和巨大的应用价值。原子陀螺仪根据工作原理可以归纳为干涉式原子陀螺仪和自旋式原子陀螺仪,干涉式主要是指原子干涉陀螺仪,自旋式又包含核磁共振陀螺仪和无自旋交换弛豫陀螺仪等。
1991年,美国斯坦福大学(Stanford University)的研究小组首次观察到原子干涉仪产生的惯性效应,引起了国内外学者和机构的密切关注和浓厚兴趣。目前,国外原子陀螺仪的研究已步入工程化研制阶段,但是距离产业化尚存在一定的距离,仍然面临诸多技术难题。
2 应用于舰艇的惯性导航技术
惯性导航技术对于舰艇导航具有非常重要的意义。舰艇在海上航行需要实时知道舰位、航向、航速等信息,惯性导航技术能够有效提供这些导航信息,既可以确保舰艇有效执行航行任务、战术机动,又能够保证舰艇上的武器装备等准确发射、精准命中。惯性导航技术满足舰艇导航技术自主性、独立性、隐蔽性的要求,具有全局性的作用,是舰艇航行作战的前提依靠和保障支撑。
2.1 初始对准技术
惯导系统充电开启,平台的坐标轴所指的方向是随意的,通常情况下平台不在水平面上,没有明确的方位和位置。因此,惯导系统在开始工作进入导航模式之前,平台的方向必须对准,这一过程即为惯性导航系统的初始对准。
初始对准的精度会直接影响舰载武器系统的命中精度,是决定舰载武器系统性能的关键因素,同时,初始对准的时间又直接关系到舰载武器的反应时间,是舰载武器系统性能的重要战术技术指标。由于舰艇需求较高的灵活机动性,且舰载武器要求超高精度和快速响应,因此,初始对准的时间需要尽可能短,且初始对准的精度需要尽量高。
初始对准按照基座的运动状态可以分为:静基座对准和动基座对准;按照对准的阶段可以分为:粗对准和精对准。对于复杂海况下航行的舰艇而言,初始对准几乎都是选择动基座对准。
粗对准指的是对平台进行粗略的初始对准,需要在尽可能短的时间内,对平台进行水平和方位上的粗调,只需满足一定的精度范围即可。粗对准是后续精对准的基础,主要特点是对准速度快,对准时间少,但精度稍低。粗对准主要用于航行时间短,精度要求低的惯性导航系统。
精对准指的是粗对准之后,通过建立子惯导误差方程,根据卡尔曼(Kalman)滤波算法估算误差量,并减小误差提高对准精度的过程。与粗对准不同的是,精对准需要达到较高的对准精度,对准时间需要在满足较高精度的前提下尽可能短。一般来说,精对准主要用于航行时间长、精度要求高的惯性导航系统,通过缩小安装误差、时延误差等,提高对准精度以保证准确命中目标。精对准方案按匹配方式的不同可以分为三种类型:测量参数匹配法、计算参数匹配法以及组合参数匹配法。
1971年,美国将计算参数匹配法应用于B-52轰炸机所携带的巡航导弹AGM-86C和SRAM 导弹;此外,美国的Draper实验室将计算参数匹配法应用于机载战术导弹;1978年,J.K.Kraemer等人所设计的计算参数匹配法在对准时间上得到了显著提高。然而,计算参数匹配法并不适用于机动能力不强的舰船,会消耗过多的对准时间。测量参数匹配法的相关算法于1983年由Schneider提出;Kain和Cloutier提出的测量参数匹配法应用较为广泛,并在飞机上完成了一系列试验。
然而,不管是测量参数匹配法还是计算参数匹配法,都是单一的参数匹配方法。为了避开单一方法的缺陷,20世纪80年代末,Kain J和Cloutier J两位学者提出了一种新的匹配方法——组合参数匹配法。相较于单一的匹配方法,组合参数匹配法的对准精度不仅高,而且对准时间也较少,因此被大量推广使用。
2.2 传递对准技术
惯导传递对准技术的定义是在平台运动状况下,平台上已完成初始对准并开始导航工作的高精度主惯导系统,将其导航定位信息传递给平台上武器系统的子惯导系统。舰艇作战平台中的导弹类武器系统的快速响应能力和精准命中性能主要是由传递对准技术决定的。总结近年来国内外对于传递对准技术的研究,重点聚集在传递对准基础理论、传递对准模型与方法这两大方面。
1)传递对准基础理论
传递对准基础理论主要包含两个方面,分别是参数辨识方法和观测分析理论与方法。
① 参数辨识方法
实现传递对准所采用的主要方法就是参数辨识方法。因为惯性导航系统属于随机系统,在初始对准期间,需要采用合适的参数辨识方法估计误差状态,以便实施状态反馈控制,目前常见的参数辨识方法有最小二乘法、卡尔曼滤波法等,自从卡尔曼滤波法成熟广泛应用之后,传递对准技术基本上采用的就是卡尔曼滤波法。
② 观测分析理论与方法
对于惯性导航系统而言,一部分状态变量或者误差变量难以通过测量得到,因此,需要采用某种观测理论或者观测方法去分析。观测分析理论与方法的好坏在很大程度上决定了传递对准技术的准确率,研究重点主要包含两个方面:首先,确定系统是否是完全可观测的系统;其次,确定不完全可观测系统中状态变量的可观测性。
2)传递对准模型与方法
传递对准的具体实现途径就是传递对准模型的构建和传递对准方法的设计,模型和方法的质量优劣确定了传递对准的性能好坏。传递对准模型与方法根据不同的参数匹配方法分为两种类型:计算参数匹配法和测量参数匹配法。
惯性导航系统进行计算推导所得到的导航参数有速度和位置两种,“速度匹配”和“位置匹配”属于计算参数匹配法;惯性导航系统的惯性器件测量所得到的导航参数有加速度和角速度两种,“加速度匹配”和“角速度匹配”属于测量参数匹配法,如图1所示。计算参数匹配法和测量参数匹配法的相关技术已在2.1节做过介绍,在此不再赘述。
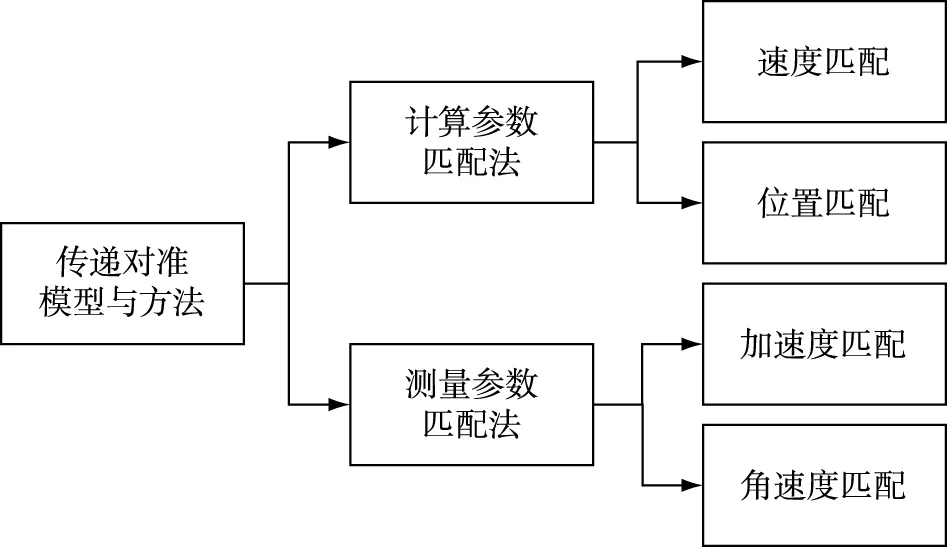
图1 传递对准模型与方法
总体而言,虽然传递对准技术是舰载武器系统初始对准的一项关键重要技术,经过了长达几十年的研究与发展,现在已经相对成熟和普及,但是,传递对准的准确性和快速性始终是武器装备论证研制与设计生产的关键需求。根据当前技术研究和发展趋势,提升传递对准性能的切实可行途径主要有深入地改进滤波方法,努力地寻找更为有效的处理方法,充分地利用不同的辅助参考信息。
3 应用于水面水下无人系统的惯导技术
3.1 水面无人艇惯导技术
水面无人艇(Unmanned Surface Vehicle,USV)的导航技术要求USV能够在海上自主航行,并且能够适应复杂的海上环境和恶劣的气象状况,因此,需要具备良好的可靠性以及抗干扰的能力。惯性导航技术能够满足USV导航的需求,其优点使其成为USV导航技术的首要选择。
USV在不同的航行和任务阶段,所需要的导航和定位精度是不同的,尤其是USV出入港口码头或者是靠岸停泊时,导航定位精度必须达到分米级别才能保证航行停泊安全,单纯地依靠惯性导航技术是无法满足长航时的高精度导航需求的。因此,还需要利用辅助设备以及环境感知系统来辅助USV的惯性导航系统,以保证满足USV导航定位的精确性需求。由于不同的导航方法优缺点各异,适用范围和性能高低也不尽相同,所以,将惯性导航技术与其他导航技术联合起来的组合导航技术是目前USV的主要导航定位技术。
捷联惯性/卫星组合导航技术是USV组合导航技术中最常见、最基础的导航技术,基本能够满足USV导航定位的需求。军用USV的导航技术尤其重视安全性和可靠性,因此,还要求军用USV的捷联惯性/卫星组合导航系统安装高精度的惯导设备。
捷联惯性/卫星组合导航有三种组合方式,分别是:松组合、紧组合和深组合。
松组合和紧组合的主要思想是接收卫星导航信号,从而抑制惯性导航系统所产生的误差累积;深组合的主要思想是具有反馈过程的紧组合,卫星导航信号依旧是压制惯导系统的误差累积,与紧组合不同的是惯导系统的导航信息又作为反馈信息用以辅助卫星导航的接收机,达到环路跟踪的效果。深组合是一种深度的“惯性导航与卫星导航互相辅助”的组合导航技术,既有惯性导航和卫星导航技术的优点,又显著克服了两种导航技术的缺点。深组合依据卫星导航接收机反馈回路的不同又分为两种类型:标量深度组合和矢量深度组合。
总体而言,USV的导航技术面临着两大难题,分别是长时间航行和复杂恶劣的海洋环境,这对USV导航技术的导航精度和可靠性带来了巨大的挑战。因此,以惯性导航技术为基础,结合其他导航技术的组合导航技术,既拥有惯性导航技术可靠性高的优点,又可以对惯性导航技术所带的误差进行修正,进而提高精度,必将成为未来USV导航技术的发展趋势。
3.2 水下无人航行器惯导技术
与USV导航技术的需求类似,水下无人航行器(Unmanned Undersea Vehicle,UUV)在水下自主航行时,需要面对比海上环境更加复杂和恶劣的水下环境,需要克服水下通信导航十分困难的难题,因此,UUV导航技术需要具备非常高的可靠性、导航精度以及极强的抗干扰能力。惯性导航技术可以满足UUV导航的大部分需求。UUV惯性导航技术为UUV提供定位、姿态、位置和导航目标信息,是UUV水下有效航行、顺利完成任务的保障。UUV惯性导航利用惯性器件测量出水下平台的三轴姿态以及加速度,将测量出的加速度对时间进行两次积分运算,可以推导出UUV的航行位置。
由惯性导航技术的缺点可知,惯性器件所测量出的导航信息存在噪声,不可避免地对位置数据产生误差累积,致使惯导系统推导出的位置相较于真实位置存在漂移。一般来说,安装于UUV上惯导系统的漂移率为1 km/h,安装于核潜艇上的惯导系统所产生的偏差最低,可低至0.01 km/h。法国IXSEA公司研发出了一种目前世界上最为轻便的水下惯导系统PHINS,该水下惯导系统如图2所示。

图2 法国IXSEA公司开发的水下惯性导航系统PHINS
水下惯性导航技术面临十分复杂的难题,水下环境十分复杂、干扰众多、惯性测量器件精度难以提升,因此,仅仅依靠惯性导航技术很难突破水下导航的难题与瓶颈,也难以胜任日益复杂的水下导航任务。因此,与USV导航技术类似,将惯性导航技术与其他导航技术联合起来的组合导航技术是目前UUV的主要导航定位技术,也是UUV导航技术的研究热点。
常用的惯性组合导航包括惯性/声学组合导航、惯性/重力匹配组合导航、惯性/地磁匹配组合导航、惯性/视觉匹配组合导航以及惯性/地形匹配组合导航等。
UUV导航技术与USV导航技术相比,面临更加复杂的水下环境,对导航精度和可靠性要求更高,此外,由于水介质对电磁波的反射吸收等作用,卫星导航技术以及无线电导航技术难以应用于USV导航技术。与USV导航技术类似的是,与惯性导航技术相结合的组合导航技术是未来UUV导航技术的发展趋势,此外,未来的UUV应用会逐渐走向集群化,协同导航技术也将成为未来UUV导航技术的重点发展方向。
4 应用于水中兵器的惯导技术
水中兵器的惯性导航技术与UUV的惯性导航技术类似,也面临复杂和恶劣的水下环境,需要克服水下干扰众多、通信导航困难的难题,因此,结合惯性导航技术的组合导航技术是水中兵器导航技术的主要方式。
水中兵器的组合导航技术种类较多,目前,水中兵器最常见的组合导航技术是多普勒惯性组合导航技术。多普勒惯性组合导航技术通过安装于水中兵器的多普勒计程仪(Doppler Velocity Log,DVL)测出高精度的水下航行速度信息,从而抑制惯性导航系统误差的累积和发散。该组合导航技术结合了惯性导航技术和水下声学导航技术的优点,具有精度高和自主性强的优点,是现在应用广泛技术较为成熟的水下导航技术。多普勒惯性组合导航技术按照耦合方式的不同主要分为松耦合和紧耦合2种。松耦合组合方式指的是把DVL推导出的水下平台速度信息与惯导系统得出的速度、位置等导航信息进行融合处理;紧耦合组合方式指的是直接把DVL的原始测量数据与惯导系统得出的速度、位置等导航信息进行融合处理。
多普勒惯性组合导航的关键技术主要分为以下三个方面:数据融合处理、标定技术和DVL数据失效处理。
1)数据融合处理
应用于水中兵器组合导航系统的数据处理主要包括两大方面,分别是数据预处理和数据融合处理。数据预处理指的是仅处理单个测量设备的测量数据,数据融合处理指的是对多个测量设备的多源测量数据进行融合处理。由于水中兵器的多普勒惯性组合导航技术存在DVL以及惯性器件两种测量设备,因此,多普勒惯性组合导航技术的核心部分就是数据融合处理,数据融合所采用的处理方法主要是基于时域的卡尔曼滤波法。
2)标定技术
标定技术主要分为两方面,分别是安装误差的标定以及刻度系数的标定。
① 安装误差的标定
惯导系统和DVL安装于水下平台不可避免地存在安装误差,导致这两种导航系统的坐标系与导航坐标系难以完全重合,如果不对安装误差进行标定,会导致导航误差不断累积。为了解决这个难题,需要对安装误差进行标定,惯导系统的标定可以采用初始对准技术,而DVL则需要采用标定技术解决安装误差标定问题。
② 刻度系数的标定
由于水下环境复杂,DVL在水下会受到水压、水温、盐度和噪声等因素的影响,且DVL发射出的声信号由于水介质的物理特性会出现散射和衰减等现象,导致DVL测量出的速度相比于真实值存在一定的偏差。因此,可以引入一个刻度系数,针对这个刻度系数采用标定技术,就能够解决DVL的速度误差修正问题。目前,解决DVL的速度误差修正问题的方法主要有最小二乘法和卡尔曼滤波法等。
3)DVL数据失效处理
① 原因分析
DVL的测速原理是:DVL中的声呐设备是主动声呐,主动声呐向外界发射声波,然后,接收发射声波的反射信号,该信号会受到周围声学环境的影响,可能会产生以下四种DVL失效情况:
a)水下平台航行时发射出的声学信号受到海洋生物的遮挡,DVL的声波无法到达海底;
b)当海底的地质为强吸声介质如淤泥时,DVL的声波到达海底,信号会被吸收,也无法被反射回来;
c)水下平台航行时遭遇到海底深沟,水下平台与深沟的距离超出了DVL的测量范围;
d)水下平台航行时产生大的俯仰运动或者大的角度转向时,DVL的部分波束接收不到反射信号。
② 解决办法
解决水下多普勒惯性组合导航技术中DVL数据短期失效问题的方法有两种,分别是隔离法和替换法。隔离法指的是当DVL数据失效时,直接隔离DVL,使多普勒惯性组合导航变为单一的惯性导航,惯导误差无法抑制,致使导航精度降低;替换法指的是将DVL的失效数据替换掉。替换法的核心思想是设计出载体相对于水底的速度估计器,达到替换DVL失效测速数据的效果。
5 研究展望与发展建议
本文介绍了惯性导航技术的重要意义和应用需求,分别从舰艇、水面水下无人系统以及水中兵器三个方面介绍了惯性导航技术在海上装备中的应用。随着科学技术的巨大进步以及国防装备的博弈竞争,惯性导航技术的应用越来越广泛,在惯性导航技术蓬勃发展的今天,正确认知与思考惯性导航技术尤为必要,在此给出惯性导航技术的研究展望与发展建议。
1)需求牵引和技术推进相结合
需求和技术是指导惯性导航发展的两盏明灯。对于惯性导航而言,需求主要反映在成本和精度两大方面,成本和精度始终是惯导技术追求的目标,牵引惯性导航向低成本、高精度的方向不断发展;重要性难题的攻关与关键性技术的突破,也推动了惯性导航技术的发展。将需求牵引和技术推进相结合,共同促进惯性导航技术的发展进步。
2)将量子技术融入惯性导航技术
量子时代的到来推动了惯性导航技术的进步,将量子技术应用于惯性测量器件中的量子无源导航是惯导技术的重点研究方向和主要研究热点。量子无源导航技术相较于传统的惯性导航技术,具有难以比拟的高精度、低误差、强抗干扰能力的巨大优势,对于国防装备和武器系统具有十分重要的战略价值。针对量子技术所面临的难题,需要投入更多的研究成本,争取早日攻关量子无源导航技术。
3)智能化融入将为惯导技术领域带来新活力
如今,智能化迎来了空前的发展和广泛的普及,这也为惯性导航技术带来了新的契机。智能化的融入为惯性导航技术带来更加完善的模型和方法,设计出更加便利的算法和软件,将为惯性导航技术领域带来新活力。
4)重视惯导技术领域的高端人才战略
惯性导航技术集数学、力学、化学、计算机科学于一体,是典型的多学科交叉技术,需要引入各学科专业的高端人才和重要专家,培养大国工匠和专业学者,制定适当的激励政策,重视惯导技术领域的高端人才战略,以促进惯性导航技术的蓬勃发展。
