自寻优最大转矩电流比矢量控制连载之一:同步电动机动态寻优MTPA控制技术综述
2022-10-15沈建新张雨馨王云冲
沈建新,张雨馨,王云冲,3,史 丹
(1.浙江大学 电气工程学院,杭州 310027;2.流体动力与机电系统国家重点实验室,杭州 310027;3.浙江省电机系统智能控制与变流技术重点实验室,杭州 310027)
0 引 言
最大转矩电流比(以下简称MTPA)控制作为一类常见的矢量控制,能够在给定转矩下最小化电流,从而降低电机铜耗,提高电机效率,因此得到广泛应用。同步电动机(包括表贴式与内置式永磁同步电动机、纯磁阻型和永磁辅助磁阻型同步电动机等)常以MTPA作为控制目标。尽管这些电机种类各异,MTPA点的电流矢量相位角不同,但它们共用相同的同步电机数学模型,不同的MTPA控制方法可以互通。本文针对同步电机的MTPA控制展开分析讨论。
MTPA的核心在于对电流矢量相位角寻优,达到给定转矩下电机电流幅值最小的目的。传统的MTPA控制方法[1-2]是通过求解转矩对电流相位角的偏导等于0的方程,认为方程中电机参数为标称值,便可得到最优电流矢量相位角的解析解。然而电机在实际运行过程中,受到温度、磁路饱和等[3-4]影响,电机参数并非固定不变的标称值,而是非线性变化的。采用传统公式法求解的电流矢量相位角存在一定误差,这使得电机的工作电流比MTPA点电流更大,导致电机的铜损增大,效率降低。为实现高精度MTPA控制,需要考虑电机参数非线性变化特性,针对这个问题,学者们提出了众多解决方案。
MTPA控制方法主要分为离线法和在线法,其中在线法主要分为在线参数辨识法和在线搜索法。离线查表法[5-7]是常用的离线法,它事先通过仿真或硬件实验完成MTPA点信息的表格,在实际电机运行过程中通过查表实现快速MTPA控制。显然,这种离线方法仅适用于某台电机,且需要大量前置工作,温度、参数变化的不确定性也会影响表格精度。在线参数辨识法[8-10]通过实时监测参数变化,相应调节当前工况下的最优电流矢量角,这种方法控制精度高,更灵活,具有普适性,但计算复杂度大。在线搜索法[11-16]基本不依赖参数,通过对电流相位角施加扰动,观察电流相位角和幅值之间的关系,以最小化电流幅值为目标,检索最优电流相位角。
搜索法计算简便,但动态性能较差。为提升系统动态性能,学者们提出了基于高频信号注入的搜索法,分为真实信号注入法[17-20]和虚拟信号注入法[21-27]。前者通过获取注入信号前后的转矩,获得MTPA判定信息(即转矩对电流相位角的偏导),这种方法计算简便,并且较大提升系统动态特性,但会引入额外的谐波和损耗;后者通过搭建数学模型,近似求解信号注入后的转矩,无需真实注入信号,克服了真实信号注入法的缺陷。但由于虚拟信号注入法的转矩模型用注入前的参数近似注入后的参数,未考虑信号注入前后参数的非线性变化,故造成了一定误差。因此需要求解误差并进行补偿,从而实现高精度MTPA控制。
本文针对同步电机的参数非线性变化特性,描述MTPA控制基本思想,梳理近年来国内外各种MTPA方法,总结分析了几种主要方法的原理思路,从稳态精度、动态特性、算法复杂程度、计算量等方面对各类MTPA控制方法进行评估对比。
1 MTPA控制数学模型
永磁同步电动机(以下简称PMSM)、纯磁阻型和永磁辅助磁阻型同步电动机,这些同步电机在d-q参考坐标系内的数学模型均可表述如下:
(1)
(2)
(3)
(4)
iq=Iscosβ
(5)
id=-Issinβ
(6)
式中:vd,vq分别为d,q轴电压;id,iq分别为d,q轴定子电流;Ld,Lq分别为d,q轴电感;R为定子电阻;ψm为励磁磁链,通常为永磁励磁,在纯磁阻型同步电机中,ψm=0;Te,TL分别为电磁转矩和负载转矩;ωm为转子的机械角速度;p为电机极对数;Bm为摩擦系数;J为转动惯量;Is为电流矢量的幅值;β为电流矢量超前q轴的夹角。
将式(5)和式(6)代入式(3)中,电磁转矩公式重写:
(7)
MTPA的控制目标是寻找最佳电流矢量相位角β,使得在给定转矩下电机的电流矢量幅值最小。将转矩对电流相位角求偏导,得到:
(8)
(9)
在表贴式PMSM中,由Ld=Lq可推得MTPA点的β=0°。类似地,在纯磁阻同步电机中,由ψm=0可以直接推得MTPA点的β=45°。实际上,受到饱和效应、磁链耦合、温度[3-4]等因素的影响,在运行过程中同步电机的参数是非线性变化的,因此利用电机标称参数和式(9)直接求出的解析解存在一定误差。为实现精准MTPA控制,需要将电机的参数变化特性纳入考量。学者们提出了众多解决方案,可将这些MTPA控制方法分为离线法与在线法。
2 考虑参数变化的MTPA控制方法
2.1 离线查表法
离线法通过在电机实际运行之前做充足的前置工作,获取电机参数、MTPA工作点等信息,在实际应用中利用这些信息直接对电机进行控制。离线法在控制过程中无需再进行复杂计算,可以有效提升系统的响应速度。查找表(look-up table, LUT)中存储了不同工况下对应的MTPA点的电流矢量相位角的信息,在电机控制过程中根据电机当前的工况查表获取最优电流矢量相位角的值,便能实现快速MTPA控制。LUT中的信息来源于提前对控制电机进行有限元建模仿真或硬件实验获取的一系列工况下的工作轨迹,因此LUT能考虑电机在运行过程中参数的动态变化。
文献[5]针对MTPA优化问题产生的四次方程,基于法拉利法进行求解分配d,q轴电流,考虑到方程内的电机参数是非线性变化的,先制作含有d,q轴电感信息的表格,根据上一个迭代周期求解的d,q轴电流,查表更新d,q轴电感值,通过法拉利法再次求解d,q轴电流直至算法迭代优化至MTPA点。方法的流程图如图1所示。这种方法可以分解部分MTPA运算给控制算法,减轻制表的复杂度,并且计算简便,使得算法整体复杂度降低。
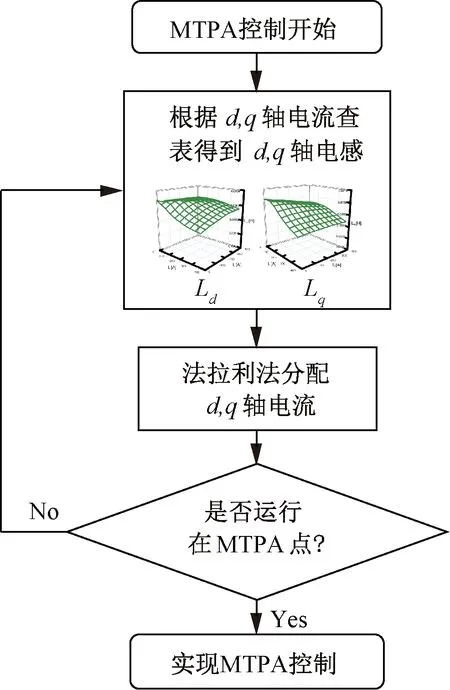
图1 d,q轴电感查表迭代MTPA控制流程图
文献[6]事先通过实验制作含有转矩和(Is,β)之间映射关系的表格,通过插值得到未出现在表格中的值,并标记MTPA轨迹。在实际控制中配合考虑磁链变化的MTPA公式,实现考虑参数变化特性的MTPA控制。
查表法需要大量的前置工作来制作表格。为了获得大范围工况变化下的电机数据,要进行多组不同工况下的仿真或实验;为了提升控制精度,需要进一步对预置工作组进行细分,这使得工作组的数量进一步增加;转矩、温度等变量都对应了不同工况,影响电机的MTPA工作点,多参数映射意味着预置工作组的制定难度和复杂度都会大幅增加。并且表格是根据目标电机获得的,只能针对目标电机进行控制,难以在不同电机之间进行移植。此外,受到加工误差、电机老化、仿真与实际情况之间误差等的影响,表格的精度进一步下降。
2.2 在线参数辨识法
考虑到磁路饱和程度、温度等的变化,电机运行过程中参数是变化的,式(9)可重写:

(10)
式中:τ表示运行过程中电机实际温度。
利用参数辨识法在电机运行过程中对电机参数进行在线辨识,可以提高MTPA控制的精度。在线参数辨识法根据电机在不同工况下参数的改变,灵活调整电流相位角的大小,以实现最优MTPA控制,不需要复杂的前置工作,并且在不同电机间都具有适用性。
文献[8]基于牛顿数值计算方法实时求解MTPA问题,由拉格朗日乘子法导出相应的非线性方程组,针对方程中的非线性变化电感参数,采用分段差分估计法来估计。
文献[9]设计了由同步帧解耦电流控制器、MTPA转矩控制器和自适应参数估计器组成的MTPA控制方案,其系统框图如图2所示。首先,对q轴电流进行自适应参数估计。参数估计器利用仿射投影提供的迭代梯度算法,通过最小化状态估计误差来估计未知电机参数。q轴电流受到反电动势的干扰,因此将所提出的估计器与鲁棒解耦方案相结合,鲁棒解耦方案基于最速下降法的简单自适应算法估计磁体磁链。算法最终将估计的参数用于自校正控制,实现MTPA控制。
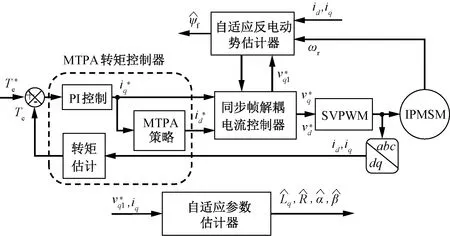
图2 自适应MTPA矢量控制器系统框图
文献[10]基于自适应电流控制器对系统干扰进行估计,构建离线系统,利用递归最小二乘法对磁链和q轴电感进行估计,根据电机参数的估计值进行MTPA控制。其中,递归最小二乘法采用公式:
(11)
式中:ts为控制器采样时间;dd,dq分别为d,q轴干扰电压。因此q轴电感和磁链的实时观测值可表示:
(12)
(13)
式中:Lq0和ψm0分别为q轴电感和磁链的标称值。
不同的算法模型辨识精度也不同。为提高算法的辨识精度,实现高精度MTPA控制,就需要更复杂的算法模型。整体而言,在线参数辨识法的计算负担较重,算法较复杂,对算力有限的嵌入式系统,实现较为困难。
2.3 在线搜索法
在线搜索法将电机系统视为一个黑箱,将电流矢量相位角作为输入黑箱的优化变量,观察黑箱输出的电流幅值大小,以最小化电流幅值作为优化目标,利用各类搜索法实现此MTPA控制目标。在线搜索法不依赖电机数学模型,同样具有适用于不同电机的普适性,并且便于计算。
文献[11-13]向电流矢量角度施加扰动信号或实时调整矢量角大小,基于电流幅值的变化不断调整迭代电流矢量角角度,最终使系统运行至MTPA点。文献[14]针对电流幅值变化观测问题,基于FFT处理电流获得的基本振幅对电流矢量角在线调谐,同样根据电流幅值的信息不断迭代获得最优电流矢量角。文献[15]基于电机的电流构建了新型目标函数,在此基础上对电流矢量角进行离散操控,寻找使目标函数值最小的MTPA点。
针对在线搜索法在负载瞬态变化时不起作用、动态性能差的问题,文献[16]增加定子电流平均值监控模块,当检测到负载或电流变化时,自适应地调整计算周期和步长,提升算法的动态特性。
先进算法的引入可以在一定程度上提高搜索法的性能,但搜索法对电流矢量相位角施加扰动进行最优检索的基本搜索机理,限制了搜索法的动态性能,使其只能适用于对动态性能要求不高的场合。
2.3.1 基于真实信号注入的搜索法

(14)
式中:Δβ为注入的高频电流矢量相位角偏移信号。需要注意的是,通常狭义上定义电流或电压这类电信号为信号,这里将相位角偏移也定义为广义信号的一种。

基于真实信号注入的搜索法能够在较大程度上改善系统的动态特性,系统响应快速,并且计算简便。但是真实信号注入引发的电流相位角瞬态偏移,会引入额外的谐波、损耗,造成转矩脉动加剧。
2.3.2 基于虚拟信号注入的搜索法
为避免因向系统注入真实信号而引入的额外损耗,学者们提出了基于虚拟信号注入的搜索法(以下简称VSIM)。该类方法无需真正向系统注入Δβ信号,而是通过构建转矩数学模型,经数值计算得到注入信号后(上标h表示)的转矩:

(15)


(16)

(17)
为考虑电机参数非线性变化,实现精准MTPA控制,可以根据式(17)计算出误差量并加以补偿。文献[24]结合离线查表法,在电机控制过程中查找表格读取注入信号前后电机参数的数值,对式(17)进行计算并补偿给系统,提升了MTPA控制精度。然而受到查表法的局限性,此方法需要进行前置工作,并且受到温度等因素影响,LUT的准确性有限。文献[25]构建转矩误差的原始模型:
(18)

图3 电机参数偏导项估测方法框图

虚拟信号注入法克服了真实信号注入法的缺陷,同时具有响应快速、计算简便的优点,但忽略了电机参数变化的特性,通过误差补偿可使工作点更接近真实MTPA点,实现更为精准的MTPA控制。
3 结语与后续研究
本文综述了考虑参数非线性特性的同步电机常用的MTPA控制策略,将这些方法分为离线法和在线法两大类,主要介绍了离线查表法、在线参数辨识法和在线搜索法的工作原理,并对它们进行分析论述,结论如下:
1) 在线法比离线法普适性更强,离线查表法的精度受限,只适用于对精度要求较低、工况较为单一的场合;
2) 在线参数辨识法能实现自适应的高精度MTPA控制,但是计算负担较大;
3) 一般搜索法不依赖电机参数就可以实现高精度MTPA控制,然而动态特性较差;高频信号注入法可以克服一般搜索法动态特性差的缺陷,但真实信号注入会引入额外损耗和谐波,使得转矩脉动加剧;
4) 传统虚拟信号注入法无法考虑电机参数非线性特性,需要配合误差分析与补偿才能实现精准MTPA控制。
基于上述分析,作者将提出三种新的动态寻优MTPA控制方法,分别是虚拟双极性信号注入法,基于电感参数扫描的虚拟信号注入法,基于同构电感建模的虚拟信号注入法,将在后续连载中详细介绍。
虚拟双极性信号注入法对现有虚拟单极性信号注入法进行改进,在确定的转矩模型上提升寻优精度,但模型中假设每次信号注入前后的电感参数为常数。此方法在PMSM和参数变化不明显的同步磁阻电机(以下简称SynRM)上能取得不错的控制效果,但在参数非线性变化显著的SynRM上存在精度问题。针对参数非线性变化显著的电机,基于电感参数扫描的虚拟信号注入法建立更精准的转矩模型,考虑了参数非线性变化。但模型中需对电感参数进行遍历扫描,使得算法执行较为繁琐,寻优时间较长。基于同构电感建模的虚拟信号注入法可以克服扫描搜索的缺陷,改善系统动态响应特性,同时考虑了参数非线性变化,实现精准MTPA控制。
另一方面,PMSM中一般永磁转矩占电磁转矩主要成分,且电感、电阻、磁链等参数的动态非线性变化较小,因此对MTPA的自寻优要求也较低。相比较而言,SynRM的电磁转矩与电感参数高度相关,而电感在不同工况下又呈现显著的非线性变化趋势。因此,作者后续提出的三种自适应MTPA控制方法,将以纯磁阻型同步电动机为应用对象。显然,这些控制方法对永磁辅助型SynRM、内置式与表贴式PMSM都是适用的。除了MTPA之外,基于其他目标(如最大转矩电压比)的矢量控制,也可以借鉴本文提出的三种控制方法。