水下机器人在北京雨洪工程水下检测中的应用
2022-10-15曹温博郑鸿志
肖 俊 曹温博 郑鸿志
(1.中国水利水电科学研究院,北京 100038;2.北京市城市河湖管理处,北京 100089)
1 引 言
水利工程建设投资大、周期长、社会效益深远。近些年随着社会不断发展,技术不断进步,对管理水平的要求也在逐渐提高。
目前水利工程水上部分的检测技术已经比较成熟,大部分能以无损或半破损方式进行[1-3]。在大力开发海洋自然资源进程中,水下检测技术得到了快速发展。水利工程的水下检测技术也应运而生,相继开发出多种先进、高效的水下检测设备及技术。目前水下检测多由潜水员携带水下检测设备进行,或采用水下无人遥控潜水器检测技术[4-5]。水下无人遥控潜水器又可称为水下机器人,广泛应用在民用和军事领域,以及在海洋、内湖环境下的各类水下工程作业、打捞救生和海洋科学考察等方面[6]。
水下检测设备一般由检测仪器和搭载平台两部分组成。检测仪器有水下超声测厚仪、水下磁粉探伤仪、水下电位测量仪、水下摄影机、水下无人遥控潜水器、水下无损探伤仪、浅层剖面仪、彩色图像声呐、水下测量电视等。搭载平台以无人水下机器人为主。无人水下机器人主要有有缆遥控机器人(潜水器)和无缆遥控机器人(潜水器)两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行的三种[7-8]。
近年来,小型水下机器人检测技术日益成熟,其具有体型小巧、安全高效、可搭载多型传感器及费用低等特点,可有效解决传统水下检测作业难度大、效率低、费用高等难题,有利于开展定期检查检测任务,提升水利工程安全管理水平。有缆遥控机器人下潜深度可达100m以上,负载能力也在10kg以上,可以满足绝大多数水利工程水下检测和作业的需求[9]。
本文结合北京市西郊蓄滞雨洪工程中暗涵出口检修闸高水位运行状态下水下无损检测项目,验证了小型水下机器人在空间狭小区域进行水下作业的适用性,积累了水下检测工程经验,可为今后常态化检测和其他类似工程提供参考及经验。
2 水下机器人功能及检测系统
本次水下检测采用的智能水下机器人FIFISH PRO V6 PLUS,属于无人潜水有缆遥控水下机器人(Remote Operated Vehicle,ROV),该水下机器人机身重量5kg,最大潜深150m,体积较小,最厚处仅158mm,灵巧高效,可进行长时间水下作业。
在操控方面,FIFISH PRO V6 PLUS具有自动定距定高声呐系统,见图1,可以实时测量前向距离和下向高度,通过距离锁定和高度锁定,降低操作难度,使各类检测工作更高效、精准。同时,该水下机器人具备6个自由度,全向360°运行姿态,可在各个方向上移动以及360°旋转、平移和倾斜。沿任何方向移动时,姿态锁定功能可以确保机器人的角度固定。
在定位和测量方面,FIFISH PRO V6 PLUS具有水下快速定位系统(U-QPS),随时随地提供水下位置,配备高精密双重标尺功能:一是基于机器视觉的AR辅助标尺;二是基于传统激光方式的激光标尺。基于机器视觉的AR辅助标尺,量测精度1cm,自适应测量范围和可视化测量数据,并可以移动标尺和自定义标尺颜色。
照明和摄录像方面,FIFISH PRO V6 PLUS配备6000lx超强光照灯,配备4K超高清相机镜头,可真实地呈现高清图像内容。此外,采用闭环增稳算法,可自适应外部干扰环境自动调节动力曲线,使ROV拍摄图像更稳定。
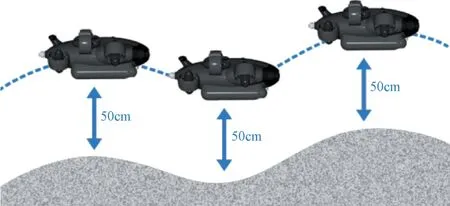
图1 声呐自动定距定高
检测作业时,根据检测内容及要求、现场水质能见度、水体内水生物分布情况等因素确定测线间距布设及检测路径,确保完全覆盖检测面。在巡游检测过程中,对发现的缺陷利用水下快速定位系统(U-QPS)和高精密双重标尺系统详细记录缺陷尺寸、位置及性状,具体检测流程见图2。
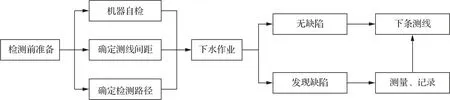
图2 水下检测流程
3 ROV系统在北京市西郊雨洪蓄滞工程中的应用
3.1 工程概况
北京市西郊雨洪蓄滞工程是为确保北京中心城区的防洪安全,不让八大处沟流域及北八排沟、琅黄沟流域27km2的100年一遇洪水下泄入城,解决其洪水出路的工程,是北京“西蓄、东排、南北分洪”的城市防洪体系中的重要组成部分。
阜石路分洪暗涵出口检修闸为2孔,出口闸在地面52.00m高程以下为2座竖井,见图3。闸室底板建在原状砂砾石土层上。检修闸门为潜孔式平面闸门,孔口尺寸为4.0m×3.8m,闸门尺寸为4.0m×3.8m-7.8m(宽×高-设计水头),闸门双向挡水,静水闭门,动水起门。
检修闸暗涵出口修建有检修平台,同时可以作为观赏平台。平台采用钢筋混凝土框架结构,平台顶高程58.00~59.25m,平台下部高程52.10m。
由于近年北京市频繁降雨,同时利用南水北调来水进行地下水回补,西郊雨洪蓄滞工程的蓄水水位和累计蓄水总量均达到历史最高。不仅在防洪方面,西郊雨洪蓄滞工程在回补地下水以及生态治理方面也发挥了重要作用,为保障首都人民生命财产安全做出了重要贡献。
阜石路分洪暗涵出口检修闸是西郊雨洪蓄滞工程的重要组成部分,该闸建成后已运行超过5年。根据《水闸安全鉴定管理办法》(水建管〔2008〕214号)的要求,为加强水闸安全管理,保障水闸安全运行,需对其进行一次全面的安全鉴定。由于持续高水位运行,闸门金属结构和涵洞混凝土的情况无法掌握,加上水闸检修平台和两侧填土出现较大沉降,可能对闸室侧墙产生影响,因此,需要对检修闸水下部分进行水下检测,为后期的安全运行提供科学依据。

图3 阜石路分洪暗涵出口检修闸照片
3.2 检测方案
通过收集原设计资料、原始地形资料,结合工程高水位状态和库区水生植物多的特点,采用从闸门两侧狭小空间进入的方法,对两侧墙、暗涵及闸门底槛进行巡查,重点对侧墙顶部、伸缩缝、暗涵与水闸闸室连接处,出口消力池进行检测,并对存在的典型缺陷尺寸进行了测量。
检测时水闸处于高水位状态且上游涵洞持续补水,利用FIFISH PRO V6 PLUS体积较小的特点,从闸门两侧及底部狭小空间穿行至重点检测位置,见图4。总体检测思路为“面积性普查与局部详查”。
水下作业时,从闸门开始由上至下、从左到右检测至底部,闸门检测完成后进行底板检测,然后检测侧墙及顶部,见图5。每个区域的测线间距根据水质情况及能见度情况设定,确保视频视角能够全面覆盖巡游范围,见图6。对重点检测部位,如暗涵与水闸连接处等,可加密测线以确保更细致的观测。
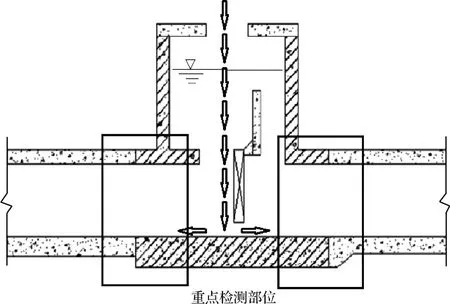
图4 水下检测区域剖面

图5 水下巡游路线
检测过程中发现缺陷需要测量尺寸时,水下机器人悬停,利用高精密双重标尺进行精确测量,见图7。激光标尺由左右两个激光发射器组成,两个激光发射器定距宽为12cm,在水下作业时可以根据红外线激光标尺结合AR算法来测量目标的尺寸,量测精度为1cm。
3.3 检测成果分析
通过对暗涵出口检修闸1孔、2孔的闸室底板,闸室侧墙、闸室相连的上下游段涵洞侧墙的全覆盖检测,主要缺陷表现为裂缝、混凝土脱落、防水层破损、闸门底槛锈蚀、底板淤积物较多等。

图6 水下检测测线

图7 高精度尺度测量
a.1号孔闸室上、下游侧墙基本完好,下游底板淤积物较多,涵洞右侧墙有一条纵向裂缝,可见长度约3m;一条竖向裂缝,可见长度约2.6m,无其他明显缺陷,见图8;1号孔涵洞下游右侧墙伸缩缝处混凝土局部脱落,见图9,面积为0.3m×1.6m,底板基本完好,无其他明显缺陷。
b.2号孔闸室及上、下游侧墙基本完好,闸门底槛金属结构有轻微锈蚀现象,见图10,闸室底板下游侧淤积物较多,见图11,无其他明显缺陷;2号孔涵洞侧墙及底板基本完好,无明显缺陷。
c.出口消力池沉积物较多,无较大可见缺陷。本次全覆盖检测未发现较大变形、较宽裂缝、大面积混凝土脱落等严重缺陷,未发现影响水闸整体安全运行的重大缺陷。

图8 混凝土裂缝
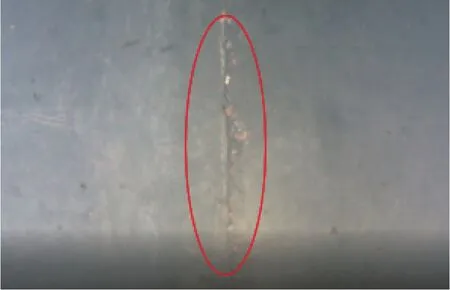
图9 混凝土局部脱落

图10 金属结构轻微锈蚀
3.4 不同检测方法对比
本次采用水下机器人对北京市西郊蓄滞雨洪工程暗涵出口检修闸进行检测取得了较好效果,从经济性、安全性、作业效率及检测效果等方面和常规水下检测方法进行对比,结果见表1。

图11 底板淤积物较多

表1 不同检测方法对比
由表1比对可见:经济性上,围堰法、放空法、人工潜水等传统常规检测手段成本较高,且围堰法、放空法需要停止生产,会造成一定经济损失;安全性上,围堰法对防水、加固等措施要求极高[10],稍有不慎容易发生事故,放空法对检测人员友好但设施突然放空对设施本身带来一定的安全隐患[11],人工潜水对检测人员素质有极高要求,属于危险作业;作业效率上,搭围堰、放空耗时较长,人工潜水有严格的时间和潜水深度规定,极大影响检测效率。
综上所述,使用水下机器人进行水下检测具有成本低、风险低、效率高、检测效果好等传统水下检测不具备或很难同时具备的优点。
4 结论及建议
4.1 结论
a.通过水下机器人成像系统可以对水下建筑物的缺陷进行全面检测。通过“面积性普查与局部详查”的检测思路,普查和详查相结合的方式提高水下检测覆盖度,当发现局部缺陷时进行悬停检测,记录信息,检测效率较高。
b.根据需求,水下机器人可搭载声呐系统、机械臂、取样装置、视踪装置等,根据检测要求灵活使用,提高检测适用性。
c.水下机器人在深水作业、危险区域作业、通过狭小空间等方面具有极大优势,搭载岸电系统,水下机器人可实现连续长时间不间断水下作业。
d.水下机器人进行水下检测具有成本低、风险低、效率高、检测效果好等传统水下检测不具备或很难同时具备的优点。
4.2 建议
a.水下机器人操控受水流流速、流态影响明显,当水流流速超过2节(约1m/s)时操控就较为困难,建议增加机器人自稳系统,进一步提高机器人的稳定性。
b.鉴于南水北调来水入京后,北京市诸多水利工程常年处于高水位运行状态,很难具备无水检测的条件,建议对该类建筑物水下部位采用水下机器人检测技术进行定期检测,确保工程安全平稳运行。