基于自适应陷波法的无人机主动噪声控制系统设计
2022-10-15杜俊贤
杜俊贤
(烟台汽车工程职业学院, 信息与控制工程系, 山东, 烟台 265500)
0 引言
无人机作为可以垂直起降、空中悬停的飞行器,具备体积小、使用便捷、适应性好的优良特性,在航拍、测绘、巡检、监测等多个领域的应用越来越广泛,但噪声却很大程度上影响了无人机的性能,阻碍了发展及更多场景的应用,比如军事上不利于隐蔽,日常使用上扰民等。因此,降噪是急需解决的问题,对于减少工作过程中的噪声污染起着至关重要的作用。
1 无人机噪声分析
1.1 噪声的产生及定义
物质的振动通过介质产生的波动即为声波,声波在本质上是物质的运动形式,而振动是其产生的根源。人类不能把声音彻底消除,但部分声音是人类不需要的,这种超出生活所需的声音就称为噪声[1]。
1.2 无人机的噪声组成
无人机的噪声主要包括发动机的噪声以及旋翼的气动噪声。发动机噪声主要有燃烧噪声、自身结构的噪声以及进气排气过程中的气动噪声。旋翼噪声主要是桨叶与空气相互作用产生的。对于发动机噪声,传统方式是在进气口排气口安装消声器,利用吸声、隔声技术吸收或者阻挡噪声的传播。对于旋翼噪声,传统方式是修正桨叶长短或者叶型,减弱与空气的作用。
2 噪声控制技术理论基础
2.1 被动控制技术
传统的噪声控制主要涉及到源头以及传播路径。由于噪声源无可避免,很难实现突破性进展,噪声的被动控制技术主要针对的是声音的传播路径,利用消声器等设施阻碍传播。虽然技术成熟、稳定性良好,但对于低频噪声作用并不明显,且会增加成本以及硬件重量。
2.2 主动控制技术
噪声主动控制(active noise control,ANC)是最近发展起来的方法,主要原理是利用次级声源在指定区域发出幅值一致,相位相反的消声信号与初始噪声进行对冲,以此抑制噪声。与被动控制技术相比,对低频噪声的控制性更好,且重量轻、体积小。
2.3 ANC基本原理
ANC技术:若两列声波频率一致且相位差固定,叠加之后传播至同一点时会产生干涉现象,如果振动同相即会加强,反之会被削弱甚至完全抵消,利用这种相长干涉和相消干涉即可实现降噪效果。在实际应用过程中需注意次声器以及噪声采集端的布放位置,且除了悬停状态之外,还需考虑旋翼与空气间的气动噪声。由于受到无人机飞行环境影响,采集设备稳定性不佳,消声频带较窄,相对来说消声面积不大,在应用场景中降噪效果会与实际要求存在差距。
3 关键算法及建模
根据被动控制技术和主动控制技术的对比分析,本文采用主动控制技术来研究无人机的噪声处理[2]。
3.1 自适应滤波器
由于次级声源和预计消声的位置之间存在一定空间,并且使用的硬件设备的电子路径都会对信号的幅值和相位有所影响,如果直接将初始信号反相处理最终可能由于上述因素偏差导致降噪效果不佳。因此,本文采用自适应滤波器法,将空间和电路对信号的影响考虑进去,确保最终的次级声波信号可以实现相消叠加效果。结构上主要包括两部分:传统滤波器、自适应算法,利用自适应算法对传统滤波器中的单位脉冲响应进行修正,达到目标函数要求。
有限脉冲响应(finite impulse response,FIR)滤波器为了满足目标函数要求,权系数会不断变化,对信号进行滤波时需要进行离散处理,使输出只与此刻输入、之前输入相关。设x(n),wi(n),y(n)分别是第n个采样时刻的输入信号、第i个权系数、输出信号。则转换后的输出可表示为y(n)=X(n)WT(n)=XT(n)W(n),其中X(n)=[x(n),x(n-1),…,x(n-L+1)]T,W(n)=[w1(n),w2(n),…,wL(n)]T。
3.2 最小均方算法
自适应滤波器需要进行权系数调整,通常采用最小均方算法(least mean square,LMS)进行。以滤波器最终输出信号与期望信号误差的均方值最小为目标,设期望输出信号为d(n),则与实际输出之间的误差可记作e(n)=d(n)-y(n)=d(n)-WT(n)X(n),那么均方误差则是ε=E[e2(n)]=E[(d(n)-y(n))2]=E[(d(n)-WT(n)X(n))2]。
3.3 延时系数辨识
次级通道既包括次级扬声器到误差传声器的通道,也包括A/D、功放等电路,可以概括为器件、电路以及声场。次级通道的存在会导致控制信号与初始信号时间不一致进而影响降噪效果,因此需要对次级通道进行预先辨识,通过传递函数来修正LMS算法的误差,降低延时影响。辨识过程如下:
(1) 将设定频率的信号经功放后发出的信号作为上文自适应滤波器S0(z)以及LMS算法的输入;
(2) 采集次级声源的输出信号y(n);
(4) 得到实际输出与模型输出误差e(n)=y(n)-y0(n);
(5) 利用LMS算法更新滤波器系数st(n+1)=st(n)+μe(n)u(n-i);
(6) 反复迭代,直到误差满足要求,将此时的滤波器系数作为受次级通道影响的延时系数。
3.4 自适应陷波法

(1) 采集误差信号e(n)、发动机转速、生成正弦信号x0(n)=Asinωt,x1(n)=Acosωt;
(2) 经过滤波后得到信号u(n)=w0(n)x0(n)+w1(n)x1(n);
(3) 输出u(n)进行主动控制;
(4) 根据次级通道辨识获取的滤波器系统计算延时补偿后输入信号;
(5) 更新滤波器权系数ωi(n+1)=ωi(n)-μe(n)xif(n),i=0,1;
(6) 反复迭代,直至误差满足精度。
算法整体流程如图1所示。
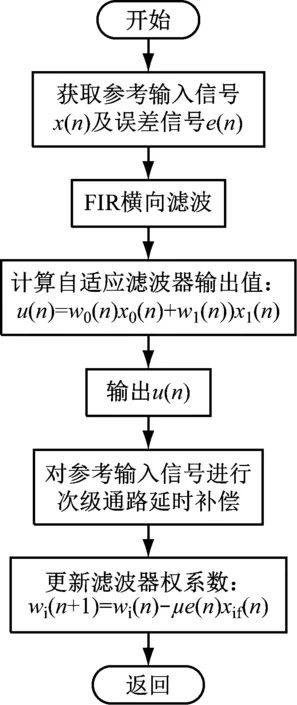
图1 自适应陷波法流程
3.5 主动控制建模
对于主动噪声控制系统,硬件安装完成后基本不会改变,次级通道特性也就只与噪声频率变化相关,因此可以利用Simulink仿真的DSP工具中的LMS算法模块计算延时系数后存储起来采用上文的陷波法获取补偿后信号,然后利用Simulink的子系统封装功能构造控制器,利用不同频率的正弦波叠加干涉作用实现主动噪声控制[3]。
4 主动噪声控制系统设计
4.1 总体设计
根据上文构建的主动控制模型以及系统功能设计无人机发动机主动噪声控制系统:首先通过CAN总线接口读取发动机转速,获取噪声峰值频率,构建次级声源输入信号;然后通过陷波法进行自适应控制,将输出信号经过信号调理后利用次级扬声器发生,进行叠加抵消;最后通过误差传声器采集剩余噪声,反复迭代,直到达到降噪要求。总体结构如图2所示。

图2 总体结构图
(1) 硬件设备:包括误差传声器、误差信号前置放大器、次级扬声器等实现信号采集与发射。
(2) 软件结构:通过CAN总线、收发电路、信号调理A/D、D/A、功放等实线信号输入、控制与输出。
4.2 主动控制器硬件设计
主动控制器包括3大模块:输入、算法转换、输出。输入模块包括发动机转速以及剩余噪声信号,算法转换采用DSP芯片利用陷波法进行信号控制后输出。整体结构如图3所示。

图3 主动控制器构成
其中各模块设计的硬件设备如下。
(1) 主控芯片:采用TMS320F28335浮点型芯片,2个16*16乘法累加器、16*256 KB闪存、16*34 KB RAM、2个CAN模块、1个SPI模块。
(2) A/D及D/A转换:TLV320AIC23B芯片,配置接口支持SPI、I2C模式,与DSP芯片可实现无缝对接。
(3) 存储:采用8*128 K串行FLASH ROM AT25F1024芯片,支持SPI模式,可靠性较高。
(4) CAN总线收发:采用SN65HVD230Q型CAN收发器,具有良好热保护及抗干扰特性。
(5) 功放:采用TPA3116D2功放芯片,可有效保护过热过压短路等情况。
(6) 误差传声器:采用MPA201型传声器,灵敏度好、适应性强、具有良好的低频段响应特性[4]。
4.3 软件功能详细设计
无人机主动噪声控制系统软件部分主要包括初始化模块、次级通路辨识模块、CAN总线收发模块、输入信号采集模块、陷波法自适应滤波模块、信号输出模块等,简单介绍如下。
(1) 初始化模块:实现各类变量初始化、McBSP串口初始化、AIC23、I2C总线初始化等。
(2) 次级通道辨识模块:利用扫频方式对目标频段进行次级通道辨识,获取滤波器时延系数[5-6]。
(3) CAN总线收发模块:通过CAN收发器采集发动机转速。
(4) 陷波法自适应滤波模块:利用CAN总线读取的发动机转速计算峰值噪声频率,构造输入信号后根据陷波法得到控制信号。
(5) 信号输出模块:通过次级扬声器发出控制信号实现噪声信号削减。
实现主动噪声控制的整体流程如图4所示。

图4 系统主动控制整体流程
5 仿真分析
为验证本文设计系统的降噪效果,采用B&K公司的PULSE分析仪进行实验分析,分析仪包括监控主机、分析软件、46AE传声器以及包括5个输入、1个输出的数据采集端,分别进行了720、2 010、2 400 r/min 3种发动机转速下的主动控制实验,将主动控制器安放于发动机两侧,与传声器、总线及扬声器连接,相对距离控制在900 mm,平行安装传声器采集噪声信号,调节发动机处于3种不同转速,对应峰值频率为24、67、80 Hz。代入系统模型,得到结果如下:
(1) 720转:降噪量为9.4 dB(Lin)
(2) 2 010转:降噪量为15.1 dB(Lin)
(3) 2 400转:降噪量为14.3 dB(Lin)
由此可以看出在发动机转速为2 010 r/min时,最大降噪量达到15.1 dB(Lin),其他转速下也有良好的降噪消声效果[7]。
6 总结
本文利用主动控制技术根据LMS算法求解次级通路影响的延时系数,根据自适应陷波法构建主动噪声控制模型,取得了良好的降噪消声效果。但在多频率自适应研究方面还有所欠缺,未考虑无人机旋翼与空气作用产生的气动噪声以及其他因素的影响,并且属于理论实验数据,综合考虑实际设备误差分析等其他影响因素将作为后续研究的主要方向。
