基于无人机搭载激光雷达的输电线路智能巡检研究
2022-10-15冯迎春李敏
冯迎春,李敏
(国网山东省电力公司检修公司, 山东,济南 250118)
0 引言
近年来,高压与远距离电力输送线路显著增加,为保障线路安全需要定期巡检线路,快速找到缺陷问题[1],避免出现事故。传统的人工巡检方法依赖于工作人员利用交通工具或步行,完成线路巡检,这种方法工作强度较大、环境艰苦且效率低。针对这些问题吴立远等[2]针对线路巡检需求,利用无人机搭载红外传感器,完成线路巡检,增强线路巡检自动化水平;王晓东等[3]利用北斗/GPS组合方法,完成线路巡检任务,定位线路缺陷位置;李振宇等[4]利用计算机视觉系统,识别线路的杆塔于绝缘子串等设备,完成线路巡检;上述方法可提升巡检效率,避免出现工作人员受伤情况,但巡检精度较低,无法准确获取输电线路至地物间的距离。无人机技术为线路巡检开辟新天地,具有安全性高、效率快等优势,在地理条件方面也没有局限性[5],即便是恶劣环境(地震与洪水等)也能够完成线路巡检任务;激光雷达属于探测技术,具备一定的主动性,求解激光发射至返回时间,即所测区域的精准距离[6],为线路巡检提供精准的数据支持。为提升输电线路巡检效果,研究基于无人机搭载激光雷达的输电线路智能巡检方法,及时发现线路缺陷,确保稳定供电。
1 无人机搭载激光雷达的输电线路智能巡检方法
基于无人机搭载激光雷达的输电线路智能巡检方法包括2个部分,分别是数据采集与处理。前者包含点云数据管理、预处理、特征识别与输电线路巡检4部分。该方法的框图如图1所示。
具体步骤如下。
(1) 以无人机搭载激光雷达的方式采集输电线路的相关数据。
(2) 通过构建点云金字塔,分档管理点云数据。

图1 输电线路智能巡检方法的框图
(3) 预处理点云数据,去掉粗差点,均匀化抽稀点云数据,提升点云数据渲染和分析效果。
(4) 点云数据分类,通过分析局部维度与多尺度点云数据特征,设计多尺度分类器,实现点云数据自动分类。
(5) 根据点云数据分类结果,分析输电线路的当前工况、最大工况与导线风偏角,完成输电线路智能巡检。
1.1 点云数据管理
通过塑造点云金字塔管理点云数据,提升庞大的点云数据智能存储和调用效果,则点云数据管理的具体步骤如下。
(1) 得到无人机搭载激光雷达采集的点云数据二维边界,就是点云坐标的最大与最小值。
(2) 为首层单位瓦片设置固定尺寸、附近层间的抽稀因子、点云抽稀方法。
(3) 整合二维边界与设值参数,求解获取金字塔全部结构参数,存储于金字塔配置文件内。
(4) 按照每层瓦片的二维边界区域,从下至上依次抽稀分配原始数据到每层中每个瓦片内,金字塔最下层的数据为无人机搭载激光雷达所采集的数据,通过第i层数据抽稀获取第i+1(i>0)层数据。
塑造完成后,按照数据请求的分辨率,得到最优的点云金字塔层数n;按照数据请求区域,设置第n层金字塔内需读取瓦片的索引区域,求解数据请求区域的二维边界,融合该边界和瓦片结构,获取重叠部分的瓦片,读取重叠面积为100%的瓦片数据,重叠面积低于100%的瓦片需选择位于请求区域中的数据;按照杆塔位置分割邻近杆塔与其2个塔间的数据,使其归为一个数据集。
1.2 点云数据预处理
通过高程插值法剔除点云数据的粗差,通过某点附近的点内插获取该点的高程,再得到内插获取的高程与该点高程间的差值,若该差值超过预设数值,则剔除[7],反之,则保留。剔除粗差后对点云数据展开均匀化点云抽稀,提升点云数据分析效果,步骤如下。
(1) 塑造八叉树数据结构,其作用是存储剔除粗差后点云数据内点属性序列。
(2) 浏览全部点云,依据八叉树子节点附近边界处理各点,展开分组。
(3) 去掉未被分配的子节点。
(4) 存储各子节点内1/N个点,将其当成处理后的激光点。
(5) 将存储的点当成抽稀后点云,删除原始点云。
1.3 点云数据分类
通过分析输电线路局部维度与多尺度点云数据特征,设计多尺度分类器,利用该分类器自动搜索最优尺度组合,完成植被、杆塔与线路本体等精准分类,线路本体包含绝缘子与跳线等微小部件。
1.3.1 多尺度特征
令预处理后的点云数据集是M,坐标是Poi=(xi,yi,zi),i=1,2,…,N,圆心是O,尺度是R,令R为球直径。M内各点周围球均参加R下的求解,利用主成分分析、计算获取的特征值是ti,i=1,2,3,t1≥t2≥t3,通过ti获取方差比例是Pi=ti/(t1+t2+t3)。Pi确定R下一至三维点云数量。设置NR个尺度,M内各点的特征向量存在|NR|个对应值,向量NR代表多尺度下局部点云维度特征。通过大尺度下周围点特征值弥补缺失点云几何特征,得到M内均匀的多尺度维度特征[8]。
1.3.2 设计多尺度分类器
利用一条直线或一个平面划分M,表达为
f(x)=ω·x+b
(1)
其中,ω、x为向量,b为实数。
在x维度是2情况下,f(x)的空间为二维,此时,f(x)为直线;在x维度是3情况下,f(x)的空间为三维,此时,f(x)为平面;在x维度超过3情况下,f(x)的空间为n维,此时,f(x)为n-1维超平面。
在NR个尺度下的点云为(xi,yi),i=1,2,…,NR,维空间点集是x∈Rd;类别标号是y,其作用是通过标注点云集划分植被、杆塔与线路本体等类别。利用式(2)将M线性划分成2类。
ω·x+b=0
(2)
最优分类超平面约束条件为
yi(ω·xi+b)>1
(3)
(4)
其中,xi为支持向量,α为Lagrange乘子i。
计算ω与b偏导数是0情况下的最优解,获取点云数据集是M的多尺度最优分类函数为
(5)
其中,b*为分类阈值。
利用逻辑函数预估样本至超平面的距离d的置信度,具体为
p(d)=q/(1+exp(-ad))
(6)
在超平面中投影M,求解各点至超平面的d=ωT·x-b。获取d1与d2,令两者在两个方向上正交,二维平面的最大可分离坐标是(d1,d2)。通过在平面中自动生成一条直线[9],完成植被、杆塔与线路本体等精准分类。
1.4 输电线路智能巡检
依据1.3小节的点云数据分类结果,分析输电线路的当前工况、最大工况与导线风偏角,完成输电线路智能巡检。按照点云数据分类结果分析输电线路当前工况,包含快速分析与精细分析[10-12]。前者主要针对线路的紧急与重大缺陷的安全距离巡检;后者主要针对中等、紧急与重大的安全距离巡检。按照点云数据分类结果,结合线路台账与气象等信息,完成线路在最高气温与最大风速等情形下最大工况线路安全巡检。依据点云数据分类结果,档距中最大的导线风偏角ζ为
(7)
其中,g1是导线自重比载,g4是风比载。
令导线直径是D,g4的计算公式如下:
g4=W0Dαμscμzμθ
(8)
其中,μθ是风力影响下的风压变更系数,a、μz是风压非均匀及高度变更系数,μsc是电线形态系数,W0是风压标准。
W0的计算公式如下:
W0=1/2ρairV2
(9)
其中,V是风速,ρair是空气密度。
μz的计算公式如下:
(10)
其中,ρG是地表非光滑程度,z是线路至地面的距离,z0是基准距地高度。
μθ的计算公式如下:
μθ=|sin(φ-φ0)|
(11)
其中,φ、φ0是正北方向和风向及线路的夹角。
通过上述公式依据点云数据分类结果完成导线风偏巡检。
2 仿真实验
2.1 实验对象
通过六翼无人机搭载LDLRS3100激光雷达采集某地区输电线路的点云数据,LDLRS3100激光雷达的扫描频率是540 kHz,重量11 kg,测距范围360 m,视场角330°。实验中无人机的飞行速度是25 km/h,高度140 m,距离25 km,时间1 h。该地区杆塔数量为71个,其中直线塔数量为56个,耐张塔数量为15个,档数70个,平均档距448.819 m。
2.2 实验流程
利用本文方法采集该地区输电线路的点云数据,并构建7层金字塔,部分输电线路的第7层点云效果如图2所示。分档处理后点云数据和杆塔叠加效果如图3所示。

图2 输电线路点云效果
预处理每档数据后,精准分类点云数据,分类结果如图4所示。按照点云数据精准分类结果,分析输电线路当前工况、最大工况与导线风偏,完成智能巡检。
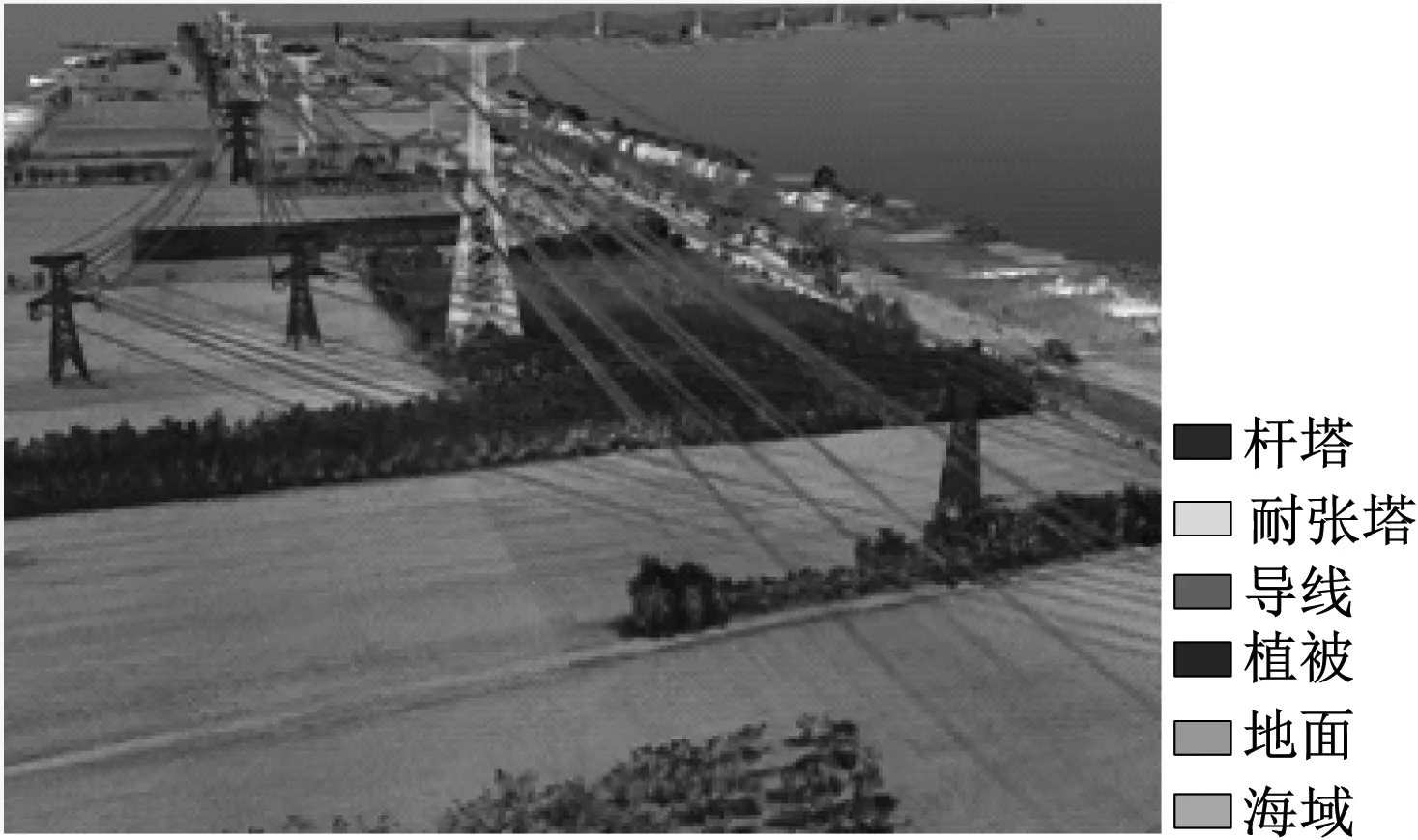
图4 点云数据精准分类结果
随机选取该地区内10个档数的输电线路,利用本文方法巡检这10个档数输电线路的当前工况与最大工况,这部分输电线路的标称电压为500 kV。在正常情况下,本文方法获取当前工况的净空距离与垂直距离巡检结果如图5所示。在最高气温temperaturehighest、最大风速speedmax、最大覆冰厚度icemax3种条件下,利用本文方法获取该部分输电线路最大工况的缺陷半径巡检结果如图6所示。当缺陷半径超过30 m时,属于重大缺陷;当缺陷半径低于30 m超过15 m,属于紧急缺陷;当缺陷半径低于15 m超过0 m,属于一般缺陷。
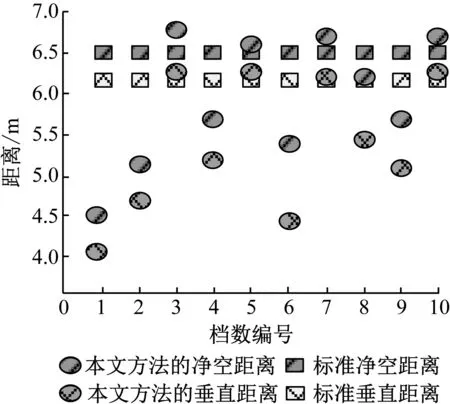
图5 当前工况巡检结果

图6 最大工况巡检结果
根据图5与图6可知,本文方法可有效获取输电线路当前工况的垂直与净空距离,完成当前工况智能巡检,本文方法的垂直、净空距离与标准垂直、净空距离,仅有档数3、5、7、10的垂直、净空距离符合规范距离,其余档数的垂直、净空距离均低于规范距离,说明这些档数间的输电线路已低于安全距离,存在距离缺陷,需及时采取相关措施进行调整,避免出现重大安全事故。本文方法可有效获取不同条件时输电线路最大工况的缺陷半径。在不同条件下本文方法获取的缺陷半径与实际缺陷半径差距较小,说明本文方法获取最大工况的缺陷半径精度较高。在不同档数时,最大工况的缺陷半径与垂直、净空距离走势基本相同。当垂直、净空距离超出标准距离较多时,输电线路的缺陷半径较大。在temperaturehighest时存在重大缺陷的档数为1,存在紧急缺陷的档数为2、4、6、9,存在一般缺陷的档数为8;在speedmax时存在重大缺陷的档数为1、2,存在紧急缺陷的档数为4、6、8、9;在icemax时存在重大缺陷的档数为1、2、6,存在紧急缺陷的档数为4、8、9;存在一般缺陷的档数为5;综合分析可知,在最大工况时,档数1、2、6存在重大缺陷,需要率先维修,其次为档数4、6、8、9,最后为档数5;工作人员依据巡检结果,按照缺陷的等级按顺序维修输电线路,避免出现安全事故,提升供电的稳定性。
在该地区随机选取一个杆塔,分析杆塔在不同风荷载时的导线风偏角,完成导线风偏角智能巡检,结果如图7所示。根据图7可知,在不同风载荷时,风速增长,导线风偏角均随之扩大,在稳定风时,风速低于2 m/s时导线风偏角未出现改变,风速超过2 m/s后,导线风偏角稳定提升,与实际导线风偏角差距不大,最大差距约为0.2°;在脉动风时,风速低于1 m/s时导线风偏角未出现改变,风速超过1 m/s后,导线风偏角开始扩大。因为脉动风强烈,导线风偏角摆动复杂,波动幅度大,本文方法巡检获取的导线风偏角与实际值差距依旧较小,实验证明,本文方法能够精准巡检输电线路的导线风偏角,风速越大,导线风偏角越大。
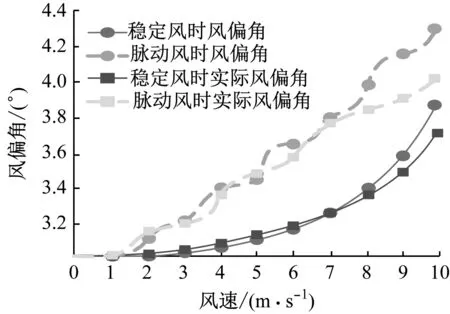
图7 导线风偏角巡检结果
3 总结
利用无人机风险性低与效率高等优势,研究基于无人机搭载激光雷达的输电线路智能巡检方法,分析输电线路的当前工况、最大工况与导线风偏角,完成智能巡检,及时发现输电线路存在的各种缺陷,依据不同缺陷制定相关策略解决安全隐患,提高供电稳定性。日后可在本文方法的基础上引入植被生长的危险预测方法,通过预测植被生长的危险等级,进一步提升输电线路巡检效果,令供电安全更为稳定。
