一种基于跨层组合的无线反馈控制优化方案
2022-10-15杨滨峰赵杰何建强
杨滨峰,赵杰,何建强
(商洛学院,电子信息与电气工程学院, 陕西,商洛 726000)
0 引言
在工厂自动化、过程监控和智能电网等工业领域,无线控制因其比有线系统灵活而受到越来越多的关注[1]。使用无线控制可以移除布线,具有便于控制移动和旋转机器、减少布线重构成本和时间以及通过远程控制提高安全性等优点。然而,在无线控制中,由于无线信道错误和分组丢失,控制质量容易恶化[2]。对于无线控制在工业领域的应用来说,如何抑制这种控制品质的恶化是非常重要的。为了解决这一问题,现有方法主要是从控制层解决丢包问题,如卡尔曼滤波[3]、预测控制[4-5]和分组预测控制[6];通过通信层的方法来处理无线信道错误,如自适应调制[7]、自动重传请求[8-9],自适应纠错编码[10]。但这些方法的效果都不是很好,并且计算量过大,无法实际部署。因此,本文提出了一种控制层预测控制和通信层纠错编码的跨层组合方法,该方法从增加控制信息冗余的一般观点出发,分组预测控制方法在控制层增加冗余,纠错编码方法在通信层增加冗余。
1 无线反馈控制系统
图1显示了采用该方法的无线反馈控制的离散系统模型。无线反馈控制系统由模型预测控制器、纠错编码编码器和解码器以及包含接收控制信息缓冲器的受控对象组成。在无线反馈控制系统中,控制器和被控对象通过无线信道在反馈控制回路中交换控制信息和状态信息,从控制器侧到设备侧的无线通信信道是以概率发生误比特的噪声信道。为了集中研究信道误差对控制信息的影响,假设来自设备侧的通信信道是无误差的理想信道。
对象是线性时不变的,其状态空间表示如式(1):
x[k+1]=Ax[k]+Bv[k]+w[k]
(1)
其中,x[k]为在时间kTs(Ts为采样周期,k=0,1,2,…)的对象的状态信息,v[k]是控制输入向量。x[k]是状态变量为Nx维向量,v[k]是输入变量为Nu维向量,w[k]表示干扰,并假设为具有零均值和协方差矩阵W的加性高斯白噪声(AWGN)向量,A和B是由对象定义的系数矩阵。
在控制器端,预测控制器被用来计算控制信息,直到Np个周期如式(2):
(2)

图1 无线反馈控制系统

(3)
其中,Q和R分别是状态信息和控制信息的权重矩阵。

(4)
(5)
v[k]=b[k|k]
(6)
其中,b[k+l|k](l=0,1,…,Np)表示第l个存储的控制信息。
在设备侧,如式(1)所述确定下一状态信息。在下一次时刻k+1时,x[k+1]被反馈给控制器,并且将随后的控制信息以与上述相同的方式被发送到设备。
2 冗余组合
本节描述了将预测控制信息冗余和纠错码冗余结合起来添加到控制信息中的方案,在控制信息中添加纠错码冗余,可以纠正无线信道错误并降低分组错误率。另外,向控制信息添加预测控制信息冗余并将其存储在设备侧的缓冲器中,即使发生分组丢失,也可以使用存储的预测控制信息来控制设备。

图2 数据包中字节数的分解
这里,让控制信息u[k|k]的大小为BuB。数据包中字节数的分解如图2所示。预测控制器将预测控制信息u[k+1|k],…,u[k+Np|k]的Np×BuB冗余添加到u[k|k],编码器将纠错编码的P×BuB冗余添加到预测控制器的分组中,因此总冗余长度为(N+P)×BuB。
在组合中,在总冗余长度固定的情况下,较长的纠错码冗余可以降低分组错误率,但不能应对连续的分组丢失。另一方面,更长的预测控制冗余度可以应对连续的数据包丢失,但是数据包错误率会变得更高。因此,在预测控制信息冗余和纠错码冗余的长度之间存在权衡。
3 实验与评估
3.1 模拟设置


(7)
采样周期为Ts=0.01 s,最大输入电压为umax=6.0 V,扰动w[k]的协方差矩阵为W=diag[σ2σ2σ2σ2],方差设置为108。旋转倒立摆控制的目的是在保持倒立摆直立的同时,使摆臂角度与目标值相匹配,在初始状态下,摆杆直立,摆臂静止(x[0]=[0 0 0 0]T),臂角度开关的目标值为每5 s在-π∕2和π∕2之间切换一次。
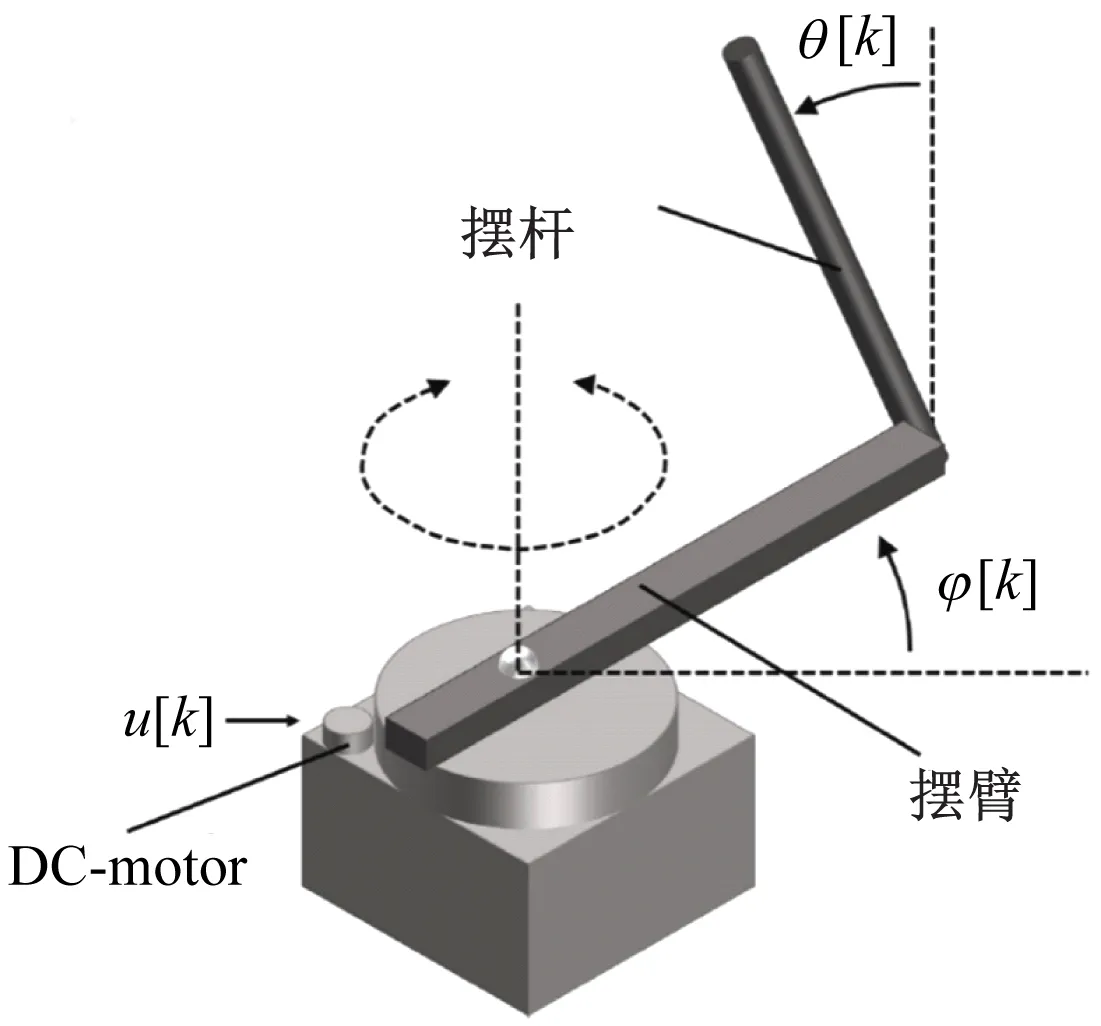
图3 旋转倒立摆
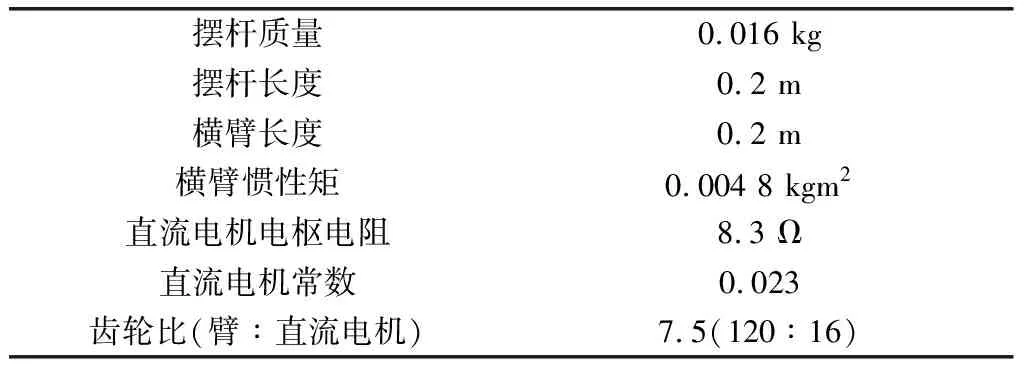
表1 旋转倒立摆的参数
控制信息的大小为Bu=1 B,数据包的其他报头的大小为3 B。编码器和解码器使用极性码和连续消除解码。为了使用极性码作为纠错码,由于极性码的限制,码长必须为2n。因此,添加到1 B控制信息和3 B报头的总冗余长度被设置为4 B(N+P=4)和12 B(N+P=12),使得代码长度变为8 B和16 B。预测控制信息的冗余长度N和纠错码的冗余长度P通过以1 B为单位改变其组合比率来设置。
模拟进行了1 000次,其中一次试验时间为100 s。如果在一次试验中,摇锤的角度超过±π∕2 rad的范围,则认为摇锤已下降。
3.2 模拟结果
稳定性和跟随性由摆杆下降率和摆臂角度的均方根误差来衡量。对于4 B冗余(N+P=4),摆杆下降率和摆臂角度的均方根误差分别如图4、图5所示。在1 B预测控制信息冗余和3 B纠错码冗余(N=1,P=3)的情况下得到最佳结果。此外,图6和图7分别表示12 B冗余(N+P=12)的摆杆下降率和臂角的RMS误差。如图6和7所示,在1 B预测控制信息冗余和11 B纠错码冗余(N=1,P=11)的情况下获得最佳结果。结果表明,将预测控制冗余与纠错编码相结合可以提高控制质量。从4 B冗余和12 B冗余的结果来看,当预测控制信息冗余为N=1时,可以得到最佳的下降率和均方根误差。其原因是,如果纠错码冗余大,则分组错误率被有效地降低,从而几乎没有分组丢失,因此认为即使一个预测控制信息冗余也可以充分补偿分组丢失。反之,当预测控制信息冗余度大时,分组丢失补偿就足够了,但是由于分组错误率大,需要使用存储在缓冲器中的旧的预测控制信息,因此与一个预测控制信息的情况相比,控制质量会更差使用冗余。
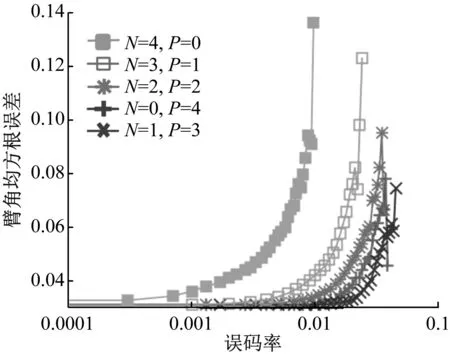
图5 臂角的RMS误差
图6 摆杆下降率

图7 臂角的RMS误差
4 总结
为了解决无线信道的错误和丢包导致的控制质量下降问题,本文提出了一种将预测控制冗余与通信层纠错码冗余相结合的无线反馈控制方法。该方法通过增加控制信息冗余实现了在控制层的预测控制,以及在编码层实现对错误编码的纠错,从而解决控制质量下降问题。实验结果表明,该方法的控制品质优于单一使用预测控制冗余或纠错码冗余的控制品质。
