基于完全自适应噪声集合经验模态分解与小波变换相结合的GPS/BDS-3多路径误差削弱研究
2022-10-15童润发
童润发
(安徽理工大学 空间信息与测绘工程学院,安徽 淮南 232001)
0 引 言
在GNSS短基线动态变形监测过程中,仅多路径误差与其周边环境相关而无法通过差分削弱,目前已经成为主要的误差源之一,削弱多路径误差已经成为了一个主要的研究问题。削弱多路径误差的主要方法可以分为选址、基于硬件和基于软件的方法,选址主要是通过选择合适的位置,但是大部分时候选址方法无法解决多路径问题;基于硬件的方法主要是改变接收机的硬件设备,如在天线上安装抑制多路径板,使用扼流线圈等;基于软件的方法主要是信噪比方法、恒星日滤波和半天球模型的方法。
采用恒星日滤波和半天球模型这两种方法之前都要对原始数据进行滤波去噪,常见的滤波方法主要是小波滤波、EMD滤波、Vondrak滤波等,小波滤波在已知信号特性的情况下可以对信号多尺度分解,有效的提取有用的信号,在处理信号降噪方面应用广泛,但是需要是设定小波基函数及分解层数,对于未知的多路径误差,使用小波滤波较为复杂。EMD是通过分解信号的时间尺度特征,将分解的本征模态分量(IMF)按照频率高低进行排序,有选择性的重构IMF得到多路径信号,在处理非线性和非平稳的信号有着明显的优势,戴吾蛟使用EMD对多坐标序列滤波消除多路径误差。但是EMD本身由于算法问题存在着端点效应和模态混叠问题,还可以进一步改进算法提升多路径提取能力。有研究人员提出了基于EMD改进的EEMD和CEEMD两种方法来对信号进行滤波降噪,使用着两种方法都是通过引进高斯白噪声分解IMF分量,但是重构的信号中会存在白噪声残留,本文使用CEEMDAN-WT的方法通过分次添加自适应白噪声,最后进行重构可以得到多路径误差模型,在第二天使用多路径模型通过恒星日滤波方法削弱多路径误差。
本文的第二节介绍了CEEMDAN-WT滤波方法,第三节进行实验分析,第四节对本文进行总结。
1 多路径基本原理
来自卫星的直射信号和反射信号组成混合信号同时进入GNSS接收机,在这个过程中,直射信号与反射信号存在一个相位延迟,这个相位延迟就造成了多路径效应,多路径效应反应到实际测量中就是多路径误差。
混合信号相对于直射信号的相位延迟,即载波相位测量的多路径误差为:

为反射信号的相位延迟,为载波信号经过反射物体时反射物体的反射信号。
对上式进行求导变换,得到φ最大值:


测站环境影响多路径效应的强弱和多路径误差的频率,如下为多路径频率与高度、距离的关系:

式中,代表接收机距离地面的高度或者与垂直面的距离,当值越大,越产生高频多路径,当这个距离超过50 m时,多路径误差可以忽略不记,因此多路径误差一般表现为低频。
2 CEEMDAN-WT滤波方法
EMD可以将信号中的不同频率或者趋势分离,产生具有相同特性的序列,并且可以通过不同特性序列的叠加剔除噪声,保留了信号的特征。但是也存在末端效应和模态混叠问题,EEMD和CEEMD被提出来解决这两个问题,但是会存在一些残留的白噪声,本文使用CEEMDAN-WT来解决分离多路径误差中白噪声残留问题。使用CEEMDAN-WT方法可以降低迭代次数,减少频率混叠效应,加快收敛,有效的分辨出不同频率的信号。
分解信号()的CEEMDAN步骤如下:
(1)在原始信号()中分次添加自适应白噪声w),本文添加自适应噪声次数=80,在第次混合信号为:

(2)经过CEEMDAN分解的一阶IMF分量为:

(3)计算一阶残余量:

(4)计算剩余阶IMF分量:

(5)不断重复上述步骤,若满足IMF的条件,则继续分解,否则分解结束,计算最后的残余项为:

根据高斯白噪声的能量密度与平均周期的乘积为固定值可以推导尺度判定系数,经过EMD分解得到IMF分量与其平均周期乘积为常量:

式中,E为第个IMF的能量密度,T为第个IMF的平均周期。通过这一特性计算出提取有用IMF分量的尺度判定系数:

当分解到第层时,若≥,则+1以及后续的IMF分量为有用的多路径信号,尺度判定层数为+1层。
计算出CEEMDAN的尺度判定系数,对后续有用的IMF分量进行小波变换,小波基选择sym8,分解层数为8层,再将滤波后的IMF分量进行重构得到有用的多路径信号。
3 实验分析
3.1 仿真实验
设置含噪声的仿真数据为:

式中包括了仿真信号γ和服从正态分布的高斯白噪声e组成,趋势项信号y有不同的低频谐波信号组成。仿真数据的样本数为10 000 s,采样为1 s。

为了验证算法的有效性,本文选取的小波基为sym8,分解层数为8层,同时实用于小波滤波和进行CEEMDAN后的小波滤波。噪声信号e符合正态分布(0, 1)。为了比较三种算法的滤波效果,计算滤波后信号与仿真信号差值的标准差(STD)以及他们的相关系数R。
图1展示的是仿真信号和趋势项信号,可以看出既有较强的白噪声,同时也有明显的趋势。图2展示的是三种方法滤波值与趋势项信号的差值,CEEMDAN-WT处理后的结果明显比其他两种方法更好,更加平稳,仿真信号提取的更好,更加精确。对于EMD存在的端点效应和模态混叠问题也有一定的改善。
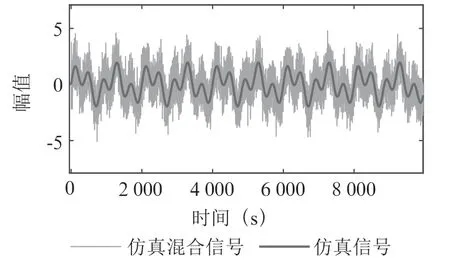
图1 仿真混合信号与仿真信号

图2 三种方法滤波值与仿真信号的差值
从表1中可以看出,小波滤波、EMD、CEEMDAN-WT提取的信号与仿真信号的残差标准差依次减小,CEEMDANWT的方法提取的结果明显好于前两种方法,分别降低了66.66%、35.71%。从表2中可以看出,三种方法提取的信号与仿真信号的相关系数都在0.95以上,CEEMDAN-WT提取的相关系数最高,也反映了该方法提取信号的效果最优,同时说明CEEMDAN-WT的降噪效果最好。为了验证本文算法的可靠性,在下一节通过处理实测数据进行对比分析。

表1 三种方法提取信号残差标准差

表2 三种方法提取信号相关系数
3.2 数据收集和方法
本节的数据来源于实测的GNSS监测站数据,选用中海大RTK10接收机,接收2022年82天和89天的原始观测数据,采样间隔为5 s,卫星截至高度角为10°,参与解算的是GPS、BDS-3的数据,将长期静态观测数据进行单历元解算得到真值坐标,并进行数据验证。由于继基线长度约为12 m,采用双差相对定位卫星钟差于接收机钟差、大气误差以及卫星轨道误差可以忽略不记,多路径误差已经成为了主要的误差源之一。
根据多路径误差重复性的特点,采用恒星日滤波削弱多路径误差步骤如下:
(1)对GPS、BDS-3的观测数据进行单历元组合解算,得到三个方向的E、N、U序列,作为CEEMDAN-WT的输入。
(2)在输入E、N、U三个方向的同时分80次添加信噪比为0.2的自适应高斯白噪声。通过尺度判定系数得到有用的IMF分量,对该IMF分量使用sym8小波基滤波,将滤波后的IMF分量进行重构得到多路径模型。
(3)计算第82天和第89天的多路径模型的最大相关系数以及时间提前量,通过时间提前量削弱第89天相关系数最大的多路径误差。
3.3 GPSBDS-3多路径误差削弱
为了比较三种方法的削弱多路径误差的效果,分别对第82天的E、N、U数据进行小波滤波、EMD、CEEMDANWT降噪,建立多路径误差模型,对第89天的原始数据剔除多路径误差。
图3展示的是第82天和第89天N方向的原始序列,图中序列存在着明显的趋势性,并且两天具有较明显的重复性,最大相关系数可以达到0.635。分别对第82天和第89天的N方向分别进行EMD和CEEMDAN分解,具体分析第82天的分解结果。EMD分解出的结果是13个IMF分量和一个残差分量,CEEMDAN分解出的结果是15个IMF分量和一个残差分量,根据上述尺度判定方法可以算出两种方法的判定层数分别是从第7个IMF和第8个IMF开始,根据噪声能量密度分析出EMD和CEEMDAN的前6个分量和前7个分量为高频噪声,剩下的都为低频多路径误差。篇幅有限,对提取前5个有用IMF分量进行傅里叶变换,并分析其频域特征。

图3 EMD、CEEMDAN的IMF分量频域分布图
经过傅里叶变换,图5横坐标是频率,纵坐标是振幅,左图是EMD分解的结果,右图是CEEMDAN分解的结果,可以看出EMD分解后的IMF分量存在明显的模态混叠问题,而经过CEEMDAN分解后的IMF的模态混叠比EMD的效果要改善很多,并且存在着明显的频率分离,说明CEEMDAN对于处理模态混叠问题具有很大的帮助。
以上通过傅里叶变化定性分析了两种情况对于提取多路径模型以及多路径的低频特性,为了进一步比较三种方法的改善效果,接下来通过统计结果对三种方法削弱多路径误差进行评价。
表3展示的是三种方法提取的第82天和第89天原始序列的相关系数和提取多路径误差序列的相关系数,原始序列的相关系数在0.3和0.65之间,N方向的相关系数略高于E、U方向,提取后的多路径误差序列相关系数大部分在0.8以上,从统计理论上来说,相关系数在0.8以上就是强相关性了,CEEMDAN-WT提取的多路径相关系数都在0.8以上,明显高于小波滤波和EMD提取的多路径误差,说明CEEMDAN-WT提取多路径的效果高于小波滤波和EMD方法。表4展示的是削弱多路径误差前后坐标序列的RMS值及改善程度。

表3 原始序列和提取多路径相关系数

表4 削弱多路径误差前后坐标序列的RMS值及改善程度
三种方法改善后的RMS值与原始序列RMS值相差不多,说明多路径误差已经是短基线相对定位过程中的主要误差了,并且三种方法改善程度都在10%以上,N方向改善程度最大,在20%以上,说明N方向的多路径误差较大。同时CEEMDAN-WT的改善效果是好于小波滤波和EMD方法的,本文所提出的方法是可靠的。
4 结 论
在GPSBDS-3的实时缓解多路径误差方面,采用EMD进行滤波会存在端点效应和模态混叠问题,进而有人提出了EEMD和CEEMD,这两种方法在一定程度上缓解了模态混叠问题,但于此同时也添加白噪声,并且在分解以后重构后仍然存在白噪声,本文提出使用CEEMDAN-WT可以在有效的缓解这种白噪声残留。通过本文的仿真实验证明,使用CEEMDAN-WT提取的仿真信号要比小波分析和EMD更加精确。同时,根据实测数据得到的结果,使用CEEMDAN-小波滤波得到的两天多路径误差相关性明显比其他两种方法的相关性更大,同时,削弱多路径误差后E、N、U方向坐标序列的RMS值更小,其改善程度比其他两种方法更好,可以有效的削弱多路径误差,提高定位的精度。