矿山巷道断面自动监测硬件方案设计
2022-10-15朱少群
朱少群
(安徽理工大学 安全科学与工程学院,安徽 淮南 232001)
0 引 言
我国是全球产出和消费煤数量最多的国家,在我国能源结构下煤矿为主要能源的方式在50年内基本都不会变动。但长期以来生产过程中的安全隐患大大阻碍了煤炭产业的发展。煤矿工业的发展过程对我国经济支撑起着巨大的促进作用,不管是在人们的平常生活中还是在产业生产过程中,煤都是不能缺少的供能物质。伴随时代的进步,煤矿产业开始朝着自动智能化的道路迈进,建设智慧型矿山已成为煤矿开采的一个趋势。同时煤炭向深部开采更易引起地表塌陷、巷道冒顶脱落等风险事故的发生,给安全生产带来极大的隐患。在智能化矿山建设持续推进的背景下,开展对巷道的自动监测的精确化研究对深部开采支护及巷道事故的预防有着重大意义。
目前对巷道断面进行的监测主要是通过巷道围岩位移的变化量及支护体受力情况两种方法,这两种方法分别是对巷道变化率及稳定性程度的一种评判。王运森等人针对巷道变形提出了一种监测巷道断面位移的实施方案,通过对巷道表面研究构建物理模型,然后利用激光测距得到测距的数据值,对数据值进行空间插值数学运算使采样的数据更丰富,最后实现了监测数据的变化量在上位机上的动态显示。朱文杰等人对巷道断面变形开展了有效监测的研究,在矿井下充分利用了激光测量的原理对巷道断面变形进行了数据测量,数据通过计算机来进行初步运算处理,得到巷道变形的收敛性,并对巷道的稳定性做了一个大致评价。杨晓庆团队针对深部巷道顶板安全问题,开发制造了一种包含围岩变形、支护体受力及顶板离层的安全监测系统,并把监测到的数据传到地面,实现了在地面上的监测。
在以上对巷道变形的研究中,这些方法在数据采集及处理速度上较为复杂且精确性有待提高;同时在监测方面对巷道断面布置比较单一,选取的测量点个数有限,无法实现多断面多测点的实时监测及数据传输组网等一些问题。针对以上问题,本文提出了一种基于激光测距原理和STM32单片机的矿山巷道断面自动监测硬件方案设计,该监测可实现巷道断面监测功能,可进行多断面测点布置来得到巷道断面的测距值,进行CAN组网实现数据之间传输。
1 巷道断面自动监测总原理
基于激光测距的原理,通过32单片机来控制脉冲的数目和频率带动步进电动的转动,每给一个脉冲步进电机就会转动一次,其步进角带动激光测距模块实现一个转角转动,在步进角带动下实现激光测距模块的180度旋转,激光测距模块扫描断面同时得到测距数据值,最后通过CAN总线实现数据的采集与传输。其巷道断面自动监测硬件方案设计主要分为电源输入供电、电机及电机驱动、激光测距传感器、CAN通信及故障报警五大模块,其总原理图如图1所示。
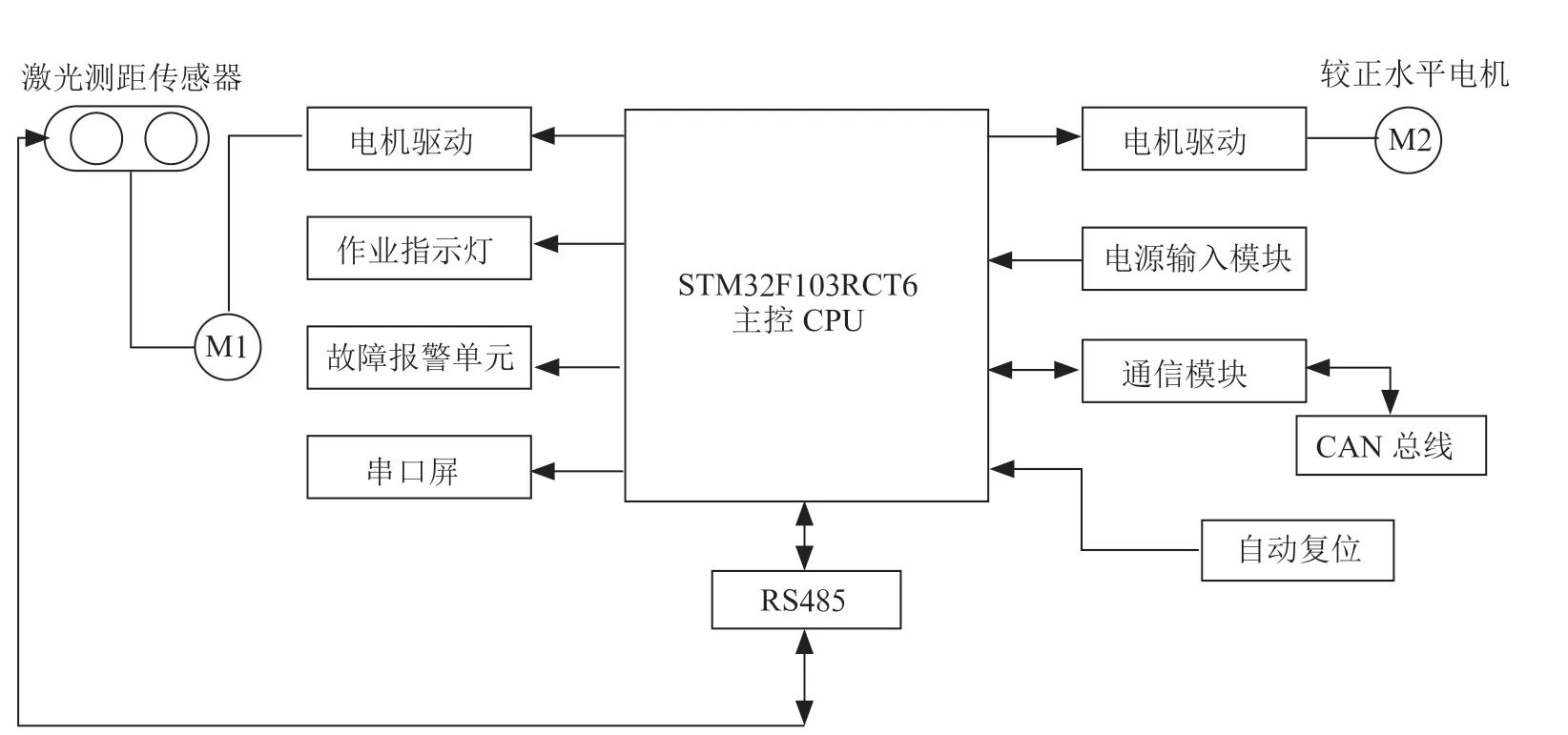
图1 巷道断面自动监测总原理图
在原理图中,电源输入模块起到为单片机供电的作用,通过电路输入供电电压3.3 V使芯片能够在正常电压下运行工作。激光测距传感器是通过固定轴固定在电机M1的转轴上,然后给电机驱动一个个的脉冲信号,电机在驱动信号下开始一步步的转动并带着激光测距传感器旋转一周,刚好能很好地完成对巷道整个断面的完整扫描。其中测距传感器通过串行RS485与芯片相接实现数据之间的读写传输。在得到数据后通过CAN总线可实现数据的采集处理与传输通信,可在多测点布局下实现数据之间的组网及传输处理。在实际应用中,由于大多数巷道并不是水平巷道,而是可能存在着一定的倾角。若电路板与巷道倾斜面不保持水平就会出现扫描面不规整、不精确的情况,故在设计中添加了电机M2与板子之间水平相固定。图中M2就起着矫正水平板子的作用,通过电机旋转较正电路板的倾角确保电机与巷道垂线保持水平,这样扫描出来的才是一个完整精确的断面形状。当发生故障时,图中故障报警单元的蜂鸣器进行报警实现故障预警功能。串口屏负责接收和发送数据,并可实时地显示出测距数值。
2 硬件选型
在硬件方案设计中,硬件的选择非常重要,选择最合适的硬件会取得更精确的结果。在该自动监测设计中:选用了ARM系列的STM32F103RCT6单片机作为控制系统的芯片。其有着8个定时器、多个通信协议、1个SDIO接口、12个通道的DMA控制、1个12位DAC、3个12位ADC和51个通用输入输出口。该芯片功能强大、功耗低且价格合理故选用此作为主控CPU。
电机选用的是四相28BYJ-48步进电机,其原理是把一个个脉冲信号转换为一步步角位移的过程。当一个连续的控制脉冲输入到步进电机时,它可以实现连续的转动。每个脉冲信号改变一次步进电机一相或两相绕组的通电状态,并与转子转动一定角度相对应。需要电机驱动电路来驱动电机旋转,电机驱动的芯片选用ULN2003。ULN2003的每对达林顿均接了一个阻值为2.7 kΩ的基极电阻。在额定工作电压下,它能够同CMOS和TTL的电路直接相接。
除此之外,方案中对激光测距模块的选择尤为重要,关系到后期开发测距后数据的精确性。选用了TOF原理的激光测距模块,其反应快、精度较高,具体的测距原理如图2所示。

图2 巷道断面激光测距示意图
图2以一个圆拱形巷道为例,在其一端设为断面测点,激光测距传感器发射端发射一个信号,等到接收端接收之后,根据中间时间差可得到测距的距离的值,其数学公式为:

其中式中代表光速,单位为m/s;代表Δ代表发射和接收之间的时间间隔,单位为s;代表测距的距离,单位为m。
最终根据不同巷道的长宽高综合考虑,选取测距量程范围为6~10 m时激光测距传感器模块为最佳,选取的测距范围过大精度会降低且误差也会较大。同时在此方案中屏幕选用的是智能串口屏,其接口简单、功能丰富、可编程性强,可以实现数据的存储传输与显示等功能。
3 电路设计模块
矿下的机电控制房输出的直流电压在12~36 V之间,而给控制芯片的供电电压3.3 V,需要使用降压稳压芯片进行直流降压,从而达到相应供电电压。其电源供电模块电路设计图如图3所示。
主控制CPU最小单元的电路图如图4所示。电源输入通电后,DSO蓝色和绿色指示灯分别亮起。PA9和PA10芯片的引脚为USART接口的串行通信,中间分别连接100 Ω电阻。EPROM存储单元采用2位串行存储芯片24C02,可存储256字节的数据。其工作电压范围为1.8 V至6.0 V。它具有低功耗CMOS技术、自定时擦除周期和一百万次编程/擦除周期。它可以在断电的情况下保存程序和数据100年。

图3 电源供电模块电路
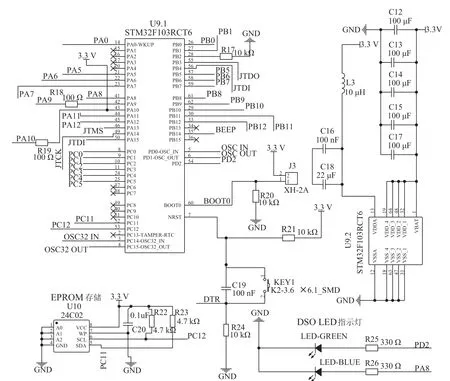
图4 主控单元电路图
电路设计中同时需要USB转TTL电路可转换为电平信号,其各外设模块电路如图5所示,图中包含了下载程序接口电路、串口屏、测距传感器及步进电机等电路图。其中,下载程序口方便快捷且可选择接口丰富,可通过MDK烧录软件使用SWD接口把程序烧录进去。其中电路图中增设了拨码开关,其可以使程序实现更加灵活化,一共可有16种不同的地址状态,可按照不同产品要求设计不同的使用方式,可实现功能多样化。
方案中最重要的是通信模块和故障预警模块,得到测距数据后可通过CAN通信实现数据的传输组网。图6中CAN通信模块用了两块芯片,其供电电压为5 V,通过电源模块给该电路供电,芯片的功耗低且收发数据信号强,CAN总线的传输距离远,数据的传输更精准。图6上侧为报警蜂鸣电路,可以起到报警的作用,蜂鸣器正极与电压相连,负极与Q1三极管相连。三极管的主要功能是电流放大和开关。电流从发射极流入三极管。在电路中,三极管Q1为NPN型。NPN型由三个半导体组成,包括两个N型半导体和一个P型半导体。P型在中间,两个N型半导体在两侧。BEEP为蜂鸣器,其为感性元件,在Q1导通蜂鸣器通电时,就会有导通电流流过蜂鸣器。
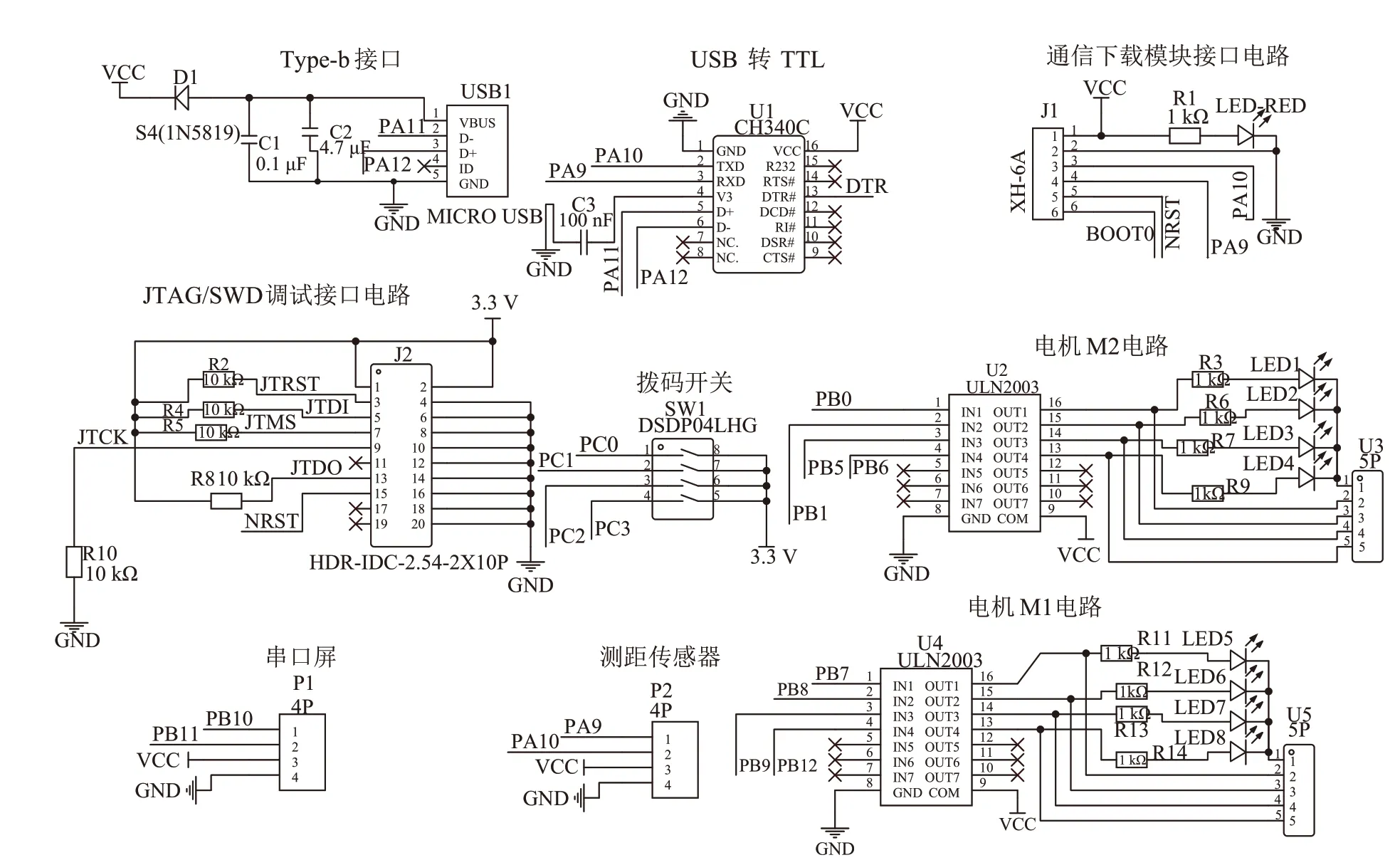
图5 各外设模块电路设计图
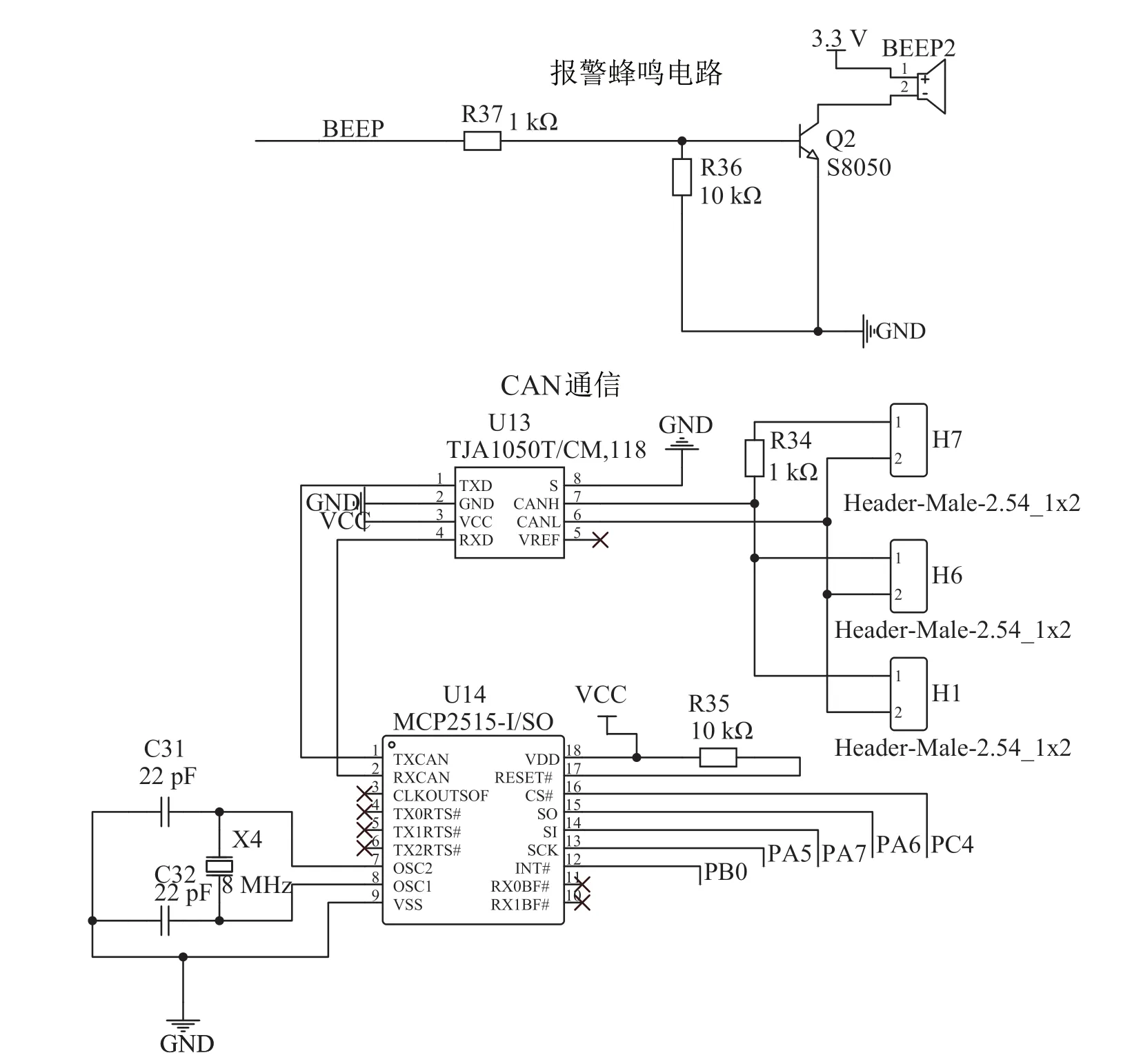
图6 CAN通信及报警蜂鸣电路
图6中R36和R37起限流作用,其中R36起下拉作用,可以提高三极管的关断速度。在运行中,三极管处于截止状态或饱和传导状态,即管的非线性应用。电路中R36的电阻值为10 kΩ。如果R36的电阻值太大,可能会损坏三极管。如果R36电阻值刚好能使三极管处于导通状态,则其电阻太小,会增加整个电路的损耗。
4 结 论
基于激光测距的原理,提出了一种以STM32F103RCT6芯片的巷道断面自动监测硬件环节设计的方案。硬件设计环节包括了电源供电模块、电机及驱动模块、激光测距模块、通信模块、故障报警模块,其中增设较正电机可解决巷道倾角问题,使巷道断面自动监测更加精确。该方案实现起来较为简单且生产成本较低,烧录程序口方便且更灵活。在矿井各巷道布置及其他重要位置布置中有着很大的应用价值。
