基于高精度卫星差分定位的组合导航研究
2022-10-15宋丽艾长胜孙崇书鲁海宁任刚长
宋丽,艾长胜,孙崇书,鲁海宁,任刚长
(1.烟台科技学院,山东 烟台 265600;2.蓬莱巨涛海洋工程重工有限公司,山东 烟台 265600;3.山东蓬翔汽车有限公司,山东 烟台 265600)
0 引 言
目前,工厂车间之间、工位之间以及不同厂区之间的物流搬运多为人工拖运,自动化程度低,不仅费时费力使劳动成本增加;对于特殊工厂的加工对于物流运输员工的更是有人身安全问题。为了满足工厂中物流运输的要求,国内外很多学者对移动机器人做了大量研究。室内外单一导航方式,在精度和稳定性上基本满足要求,但是对于路面环境复杂且行驶路线分布室内外的导航方式仍有很多不足。为了满足这种需求提出了一种GNSS与Lidar组合导航的方法。
GNSS是一种天基无线电导航系统,通过接收机接收天上卫星发射的信号,根据信号发射和接收的时间差或者信号的载波相位来确定卫星和接收机之间的距离,基本观测量主要是码相位(精测距码P码和粗测距码C/A码)和载波相位。测量应用有精密单点定位技术(PrecisePoint Positioning,PPP),相对定位以及虚拟参考站动态定位技术VRS(Virtual Reference Station)技术。同时采用双天线GNSS/INS系统进行移动机器人的姿态测量。
SLAM实时定位与地图构建,主要应用于一个机器人在未知的环境中运动,通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。在激光SLAM系统中,Gmapping获取扫描的激光雷达信息以及里程计数据不良等情况而引发的火灾、漏电等生产安全事故,因此这种方式一般用可动态的生成2D栅格地图。导航包则利用这个栅格地图,里程计数据和激光雷达数据做出适合的路径规划和定位,最后转换为机器人的速度指令。
本文对两种导航方式组合,并进行定位分析,在复杂环境中进行试验,验证该组合导航的可靠性和实用性。
1 组合导航原理分析
1.1 差分GNSS导航系统
在室外,主要通过GNSS系统进行导航定位,首先需要架设固定基站,设定基站固定的坐标值,保证差分数据的正确,通过电台通信的方式将差分信息发送给移动站,移动站收到差分信息进行差分处理,提高GNSS导航系统的定位精度。如图1所示,移动站GNSS天线固定在AGV或者移动机器人前后方向上,后向天线为定位天线,前向天线为辅助天线用于辅助计算航向角,由于GNSS导航系统输出的是WGS84坐标系数据,需通过高斯投影算法将WGS84坐标系转化为平面坐标系,直接转化的平面坐标系原点距离AGV或者移动机器人很远,坐标值数值较大,为了便于计算将转化后的坐标系原点平移到车辆附近,建立适用于AGV或者移动机器人使用的GNSS局部坐标系。最后在局部坐标系中利用双天线测量获得AGV或者移动机器人的位置和姿态信息。

图1 差分GNSS导航系统
1.2 激光SLAM导航
在室内,通过激光SLAM进行导航定位,对于载物体型尺寸较大的AGV或者移动机器人,不能使用单一的激光雷达置于顶部进行环境检测,故采用对角分布的双激光雷达进行360度扫描。如图2所示,首先需要将两个激光雷达的扫描面重合,然后开始建图,建图完成之后需要将所建的地图进行旋转平移,使地图与GNSS局部地图重合。在导航使用Lidar系统输出的位姿信息时,同样需要进行相同的旋转平移。

图2 Lidar布局方案
1.3 组合导航
首先在室外采用差分GNSS导航系统提高GNSS定位导航信息的精度,同时GNSS系统与INS系统组合提高导航信息的稳定性,经高斯投影方法将大地坐标系转化为平面坐标系,通过双天线测量方式计算获得位姿信息(,,);在室内使用激光SLAM算法获得激光平面坐标系下的位姿信息(,,)。然后将两坐标系分别平移旋转进行重合处理获得导航位姿信息(,,),最后根据不同来源的导航信息状态随时进行切换处理保证室内外导航信息可靠性。过程如图3所示。
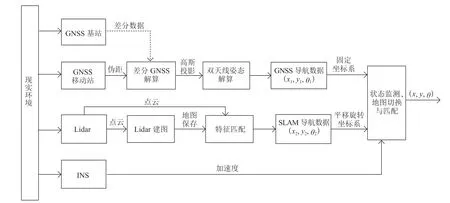
图3 差分GNSS和激光SLAM组合定位框图
1.3.1 高斯投影与构建GNSS局部坐标系
在室外,主要通过GNSS系统进行导航,由于GNSS导航系统输出的是WGS84大地坐标系数据,地心坐标系是坐标系原点与地球质心重合的坐标系,输出数据的格式是经度、纬度和海拔高度,此信息不能直接用于AGV或者移动机器人导航,需转化为平面坐标系。采用高斯投影方法进行转换,如图4所示。
1.3.2 建立Lidar局部坐标系
在室内GNSS信号很弱,采用对角分布的双激光雷达进行导航。采用对角分布的激光雷达需调整两个雷达的扫描面在同一水平面,进行360度扫描,两激光雷达通过网线连接到交换机上,从交换机引出网线,将激光扫描信息发送给工控机,同时将车辆状态信息也发送给工控机进行建图等处理操作,过程如图5所示。
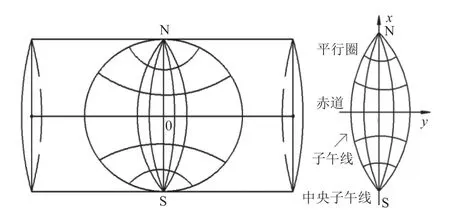
图4 高斯投影简图

图5 激光SLAM导航系统
然后缓慢驾驶AGV或者移动机器人根据扫面获得的点云数据进行建图处理,为了保证不同数据源切换时数据稳定,把激光导航系统局部坐标系原点设置在GNSS信号稳定的位置,一般设立在切换点上,建图完成之后保存地图。在使用激光导航系统时。需要时时向激光导航系统发送AGV或者移动机器人的位置姿态信息,便于激光系统导航根据相对特征快速匹配地图。同时为了与GNSS导航系统的局部地图快速对接,需将不同数据源的坐标系融合,保证在AGV或者移动机器人运行时只有一个局部坐标系原点,应将激光导航系统的地图和时时的点云数据进行旋转平移。
1.3.3 状态检测与地图切换
地图切换主要包括两种形式,分别是从GNSS强信号区域行驶到GNSS弱信号区域和从GNSS弱信号区域行驶到GNSS强信号区域,对应着GNSS导航系统与激光导航系统的切换,由于这两种导航系统的导航信息中包含导航信息可信度等状态信息,有了这些状态信息可以灵活的进行两种导航方式地图切换。
Lidar导航系统切换至GNSS导航系统,若在GNSS信号变弱之前地图匹配成功,则进行导航信息源的切换,AGV或者移动机器人继续行驶,否则车辆暂停,静态完成地图匹配之后在进行导航信息数据源切换,切换完成继续行驶。GNSS导航系统切换至Lidar导航系统,在Lidar导航系统地图匹配时需要一定时间,故在切换过程中GNSS导航系统的导航信息状态由接收到的卫星信息和卫星数量进行判定,而Lidar导航系统的局部地图是否匹配成功需要由计算出的地图可信度信息进行判定,确保导航系统切换成功。
2 组合导航试验测试
验内容:本试验主要测试大厂区构建3D点云图的精度、GNSS与3D Lidar组合定位精度,以及车辆轨迹和停车精度。
测试地点:本测试报告实验场地在某制药公司。
清朝初年,著名藏书家孙从添总结古人藏书经验,并加以系统整理后,撰写了中国第一部全面论述藏书技术的理论著作《藏书纪要》。该书详细介绍古人藏书在购求、鉴别、钞录、校雠、装订、编目、收藏和曝书等方面的经验,对后世的古籍整理具有重要的参考价值。特别是相关术语和准则,至今仍在延用。
测试环境:现场环境包括空旷的室外环境和半室内环境。
导航方式:全球导航卫星系统(GNSS)与双3D SLAM雷达组合导航。
测试速度:直线行驶速度为1.5 m/s、转弯速度为0.8 m/s、停车速度为0.3 m/s。
2.1 全局路径规划
针对某药厂生产实际和已知条件进行了基本分析和全局路径规划,路径规划如图6所示,现场测试如图7所示。

图6 路径规划图

图7 现场测试图
2.2 建图效果
图8为现场建图侧视图效果,经过测试里程计数据与真实环境的偏差小于0.1 m。

图8 现场建图侧视图效果
2.3 避障程序试验
避障程序开发通过指令选择不同的防护区域,防护区域的不同,防护区域的防护范围不同,图9为防护区域的大小变化,图纸不同颜色的点为不同的防护区域障碍。

图9 接收指令后的数据
2.4 定位精度测试试验
定位精度是在建图的基础上测试,图10为构建点云图的局部视图。

图10 局部点云图
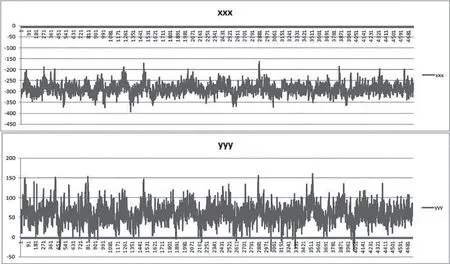
图11 定位数据波动情况
2.5 通信接口测试
通信接口测试接口程序稳定性和硬件接口稳定性,在校通过串口助手测试发送782 213个数据未出现不良情况,如图12所示。

图12 接口数据
2.6 停车精度
车辆在作业过程中,导航系统根据定位数据控制车辆运行,停车精度这个指标保证了车辆作业的稳定性。图13为现场10次运行过程中多次停车的精度,图中白色线为自动驾驶模式下轨迹。经实验车辆横纵方向的停车精度在±5 cm以内。
图13 车辆多次运行停车范围
2.7 试验结果
经过实验测试,构建3D点云图的精度与真实场景偏差小于0.1 m;定位数据的标准差为25.45 mm,的标准差为24.20 mm;在自动驾驶模式下车辆的直线行驶轨迹重合偏差和停车偏差小于±5 cm。经过以上测试,车辆的轨迹重合精度和停车精度满足现场需要,可以实现全自动搬运。
3 结 论
基于高精度卫星定位组合导航的卡车AGV控制系统,采用Lidar和GNSS/INS组合定位,室内采用激光SLAM进行导航,室外采用差分GNSS导航系统进行导航,通过对差分GNSS构建的局部坐标系平移和对激光SLAM构建的局部坐标系先旋转再平移,使两种坐标系重合。在运动导航过程中检测导航信息状态,根据导航信息的状态特征进行两种导航方式的切换。差分GNSS和激光SLAM组合导航的方法弥补了单一导航方式的不足,实现了室内外稳定的输出导航信息,停车精度小于±2 cm,可广泛应用于工厂车间之间、工位之间的物流搬运。