人工势场和虚拟结构结合的无人车编队及避障研究
2022-10-14崔立堃冯绪永王承祥
崔立堃,冯绪永,王承祥
(陕西理工大学 机械工程学院, 陕西 汉中 723001)
1 引言
随着多机器人系统的发展和无人战车各项技术的日趋成熟,多无人战车编队,因其可以高效完成侦查、扫雷、高精度协同打击等陆地军事作战,具有重要研究意义。目前常采用的编队方法有虚拟结构法(VSF)、领航跟随法、人工势场法(APF)等。曲成刚等提出一种将人工势场法与虚拟领航者相结合来控制多智能体队形方法,通过增加和布置虚拟体来使编队队形更加灵活,解决了编队中智能体对领航者的依赖问题。陈骏岭等通过改进已有的多机器人编队避障算法,解决了人工势场法避障中出现的极小值点问题。李金芝等提出一种基于改进领航-跟随法和改进人工势场法相结合的编队控制算法,实现了多机器人编队的无碰撞路径到达目标点。陈杨杨等采用主从式的编队形式,基于自组织神经网络(SOM)和人工势场相结合的控制方法,对领航者进行路径规划,实现编队整体有效避过障碍物,到达目标点。刘安东等在传统的虚拟结构法基础上通过引入变换矩阵对基于刚体结构的虚拟结构法进行改进,有效地扩大了其应用范围,并进一步利用纳什优化策略对所建立的问题进行求解,得到稳定化的控制器,最后通过仿真验证了所提出算法的有效性。张玉超等采用分布式编队控制结构,建立基于三阶积分器的多机器人系统模型,提出协同编队动态避障控制算法,实现了静态及动态障碍物规避、机间防撞、位置和速度收敛一致等控制目标。Longfei Dong等提出了一种基于虚拟结构和一致性方法的非完整智能车辆编队控制策略,控制器采用非完整目标跟踪技术和领导跟随一致性协议,将多辆非完整智能车辆的编队控制问题转化为目标跟踪和状态一致性镇定问题,通过仿真和实验对比,证明了该策略的正确性和有效性。
在上述众多文献中,很少有文献考虑基于虚拟结构的避障问题,个别基于虚拟结构的避障,也是通过虚拟参考点以整个虚拟结构为单位进行路径规划来实现避障的,这使得编队结构缺乏灵活性。本文通过虚拟结构法来生成编队车辆的期望轨迹,采用人工势场法建立车辆与虚拟结构中虚拟点的势场,控制编队中队形的保持和编队车辆避障后重新形成编队,基于Matlab平台,验证了本文所提出的人工势场与虚拟结构相结合的多车辆协同避障路径规划算法的有效性和实用性。
2 基于虚拟结构的路径规划
虚拟结构法的基本思想是利用一条参考基线来生成一组编队车辆的期望结构和运动轨迹。首先定义一辆编队参考车辆VRF(可以为虚拟参考车辆),该车辆为虚拟结构的中心,该车辆的行驶轨迹为整个虚拟结构的参考基线。编队虚拟结构如图1所示。

图1 编队虚拟结构示意图Fig.1 Formation virtual structure
(1)

如图1所示,在编队参考车辆VRF的车体坐标系0-0下引入个偏移向量,可生成条预先设计好的参考编队轨迹,即:

(2)
从车体坐标系到惯性坐标系的旋转矩阵为:

(3)
相对于车体坐标系下的偏移向量为:

(4)
式(4)中,(·)、(·)通常为常数,其值不同会形成不同的编队结构。
3 人工势场和虚拟结构结合的编队避障


图2 基于人工势场编队避障示意图Fig.2 Obstacle avoidance diagram of formation based on APF
定义车辆与虚拟结构中移动车辆之间的引力势场函数为:

(5)
对式(5)求负梯度,可得到车辆与虚拟结构中移动车辆之间的引力为:

(6)
式(6)中:▽为梯度算子;为引力系数;‖·‖为对向量求二范数,其中

(7)
将式(7)代入式(6)可得:
(8)
定义车辆与障碍物之间的斥力势场函数为:

(9)
对式(9)求负梯度,可得到车辆与障碍物之间的斥力为:
(10)
式(6)中:为斥力系数;()=‖()-()‖-,为障碍物半径,()为障碍物圆心;为障碍物影响距离。
定义车辆之间的车间防撞斥力势场函数为:

(11)

(12)
车辆受到的总势场力为:

(13)
由式(8)可以看出,车辆对每一时刻目标点的引力就像PID控制中的控制一样,为使规划的编队稳定运行,在避障时要满足:

(14)
根据编队中每个车辆受到的总能量——来自目标点的引力势能、来自障碍物的斥力势能、来自车辆彼此间的斥力势能和车辆本身的动能,来构造Lyapunov函数。构建Lyapunov函数为:

(15)
从式(15)可以看出≥0,只有当编队中车辆跟踪上虚拟结构中虚拟点时=0。对式(15)求时间的导,得:

(16)
将式(13)代入式(16)可得:
(17)

4 仿真实验
为验证本文所提出的人工势场与虚拟结构相结合的多车辆协同避障路径规划是否合理,利用Matlab对编队路径规划算法进行仿真验证。设定车辆编队的虚拟结构为3辆车并排行驶,速度初始为0,加速度为0.5 m/s,加速到10 m/s时,车辆匀速行驶,在坐标(150,2.5)设置半径为的圆形固定障碍物。各车辆的初始位置均位于初始的虚拟结构点处,初速度均为0。
为了方便观察编队在行进过程中避障与重新组成编队,把由3辆车组成的并排行驶的编队(如图3所示)在全局坐标系下展示出来。图3中,小圆圈代表障碍物,大圆圈代表障碍物的影响距离,3条平行的黑色直线是由虚拟结构法生成的编队路径,车辆在没有到达障碍物影响范围时,受人工势场引力作用下沿虚拟结构法生成的路径行驶,在行驶到障碍物影响范围后,受到人工势场斥力影响下使编队车辆绕过障碍物,编队车辆轨迹平缓。
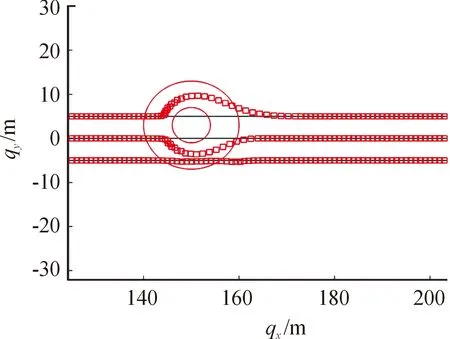
图3 人工势场结合虚拟结构编队避障Fig.3 Obstacle avoidance by APF combined with VSF
图4、图5为编队中各车辆速度沿轴和轴变化曲线。

图4 速度沿x轴变化曲线Fig.4 Velocity change curve along the x-axis
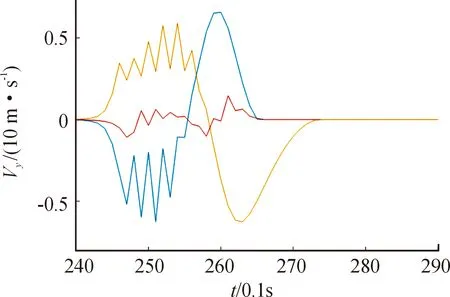
图5 速度沿y轴变化曲线Fig.5 Velocity change curve along the y-axis
从图4可以看出,距离障碍物较近的车辆在开始靠近障碍物时,车辆沿轴速度迅速变小,这样有助于车辆顺利避障;在车辆将要驶出障碍物区域时,车辆沿轴,速度开始提高,速度的提高源于虚拟结构中虚拟点对车辆的引力增加和障碍物对车辆斥力的减小,这样有助于车辆在避障完成时快速恢复编队队形。从图5可以看出,由虚拟结构规划出的编队轨迹距离障碍物较近的2辆车,其在靠近障碍物时车辆沿轴速度迅速变化,沿轴的速度变化率代表车辆的行驶方向发生变化,沿轴速度的迅速改变,有利于车辆改变行驶方向,避免了与障碍物的碰撞;在远离障碍物时,车辆沿轴速度迅速变化,使编队车辆快速恢复到由虚拟结构生成的编队队形。从图4、图5中看出,车辆沿轴和轴的速度在靠近障碍物时速度有抖动,抖动的原因是车辆一时难以走出大障碍物的势场影响范围。
图6显示了使用人工势场和虚拟结构相结合算法实现了6辆车编队避障。图7显示了6辆编队车距离VRF的实时距离,编队车辆距离VRF在10 m左右。图8显示了6辆车与其对应虚拟车辆之间距离的变化情况。从图6—图8可以看出,编队车辆在未遇见障碍物时,可以保持编队队形行驶,当编队中有车辆遇见障碍物时,可以很快完成避障并恢复队形,继续前进,且编队路径变化较为平缓,编队中各车辆可实现单独避障,并在避障后可及时跟踪上虚拟结构中对应的虚拟点。
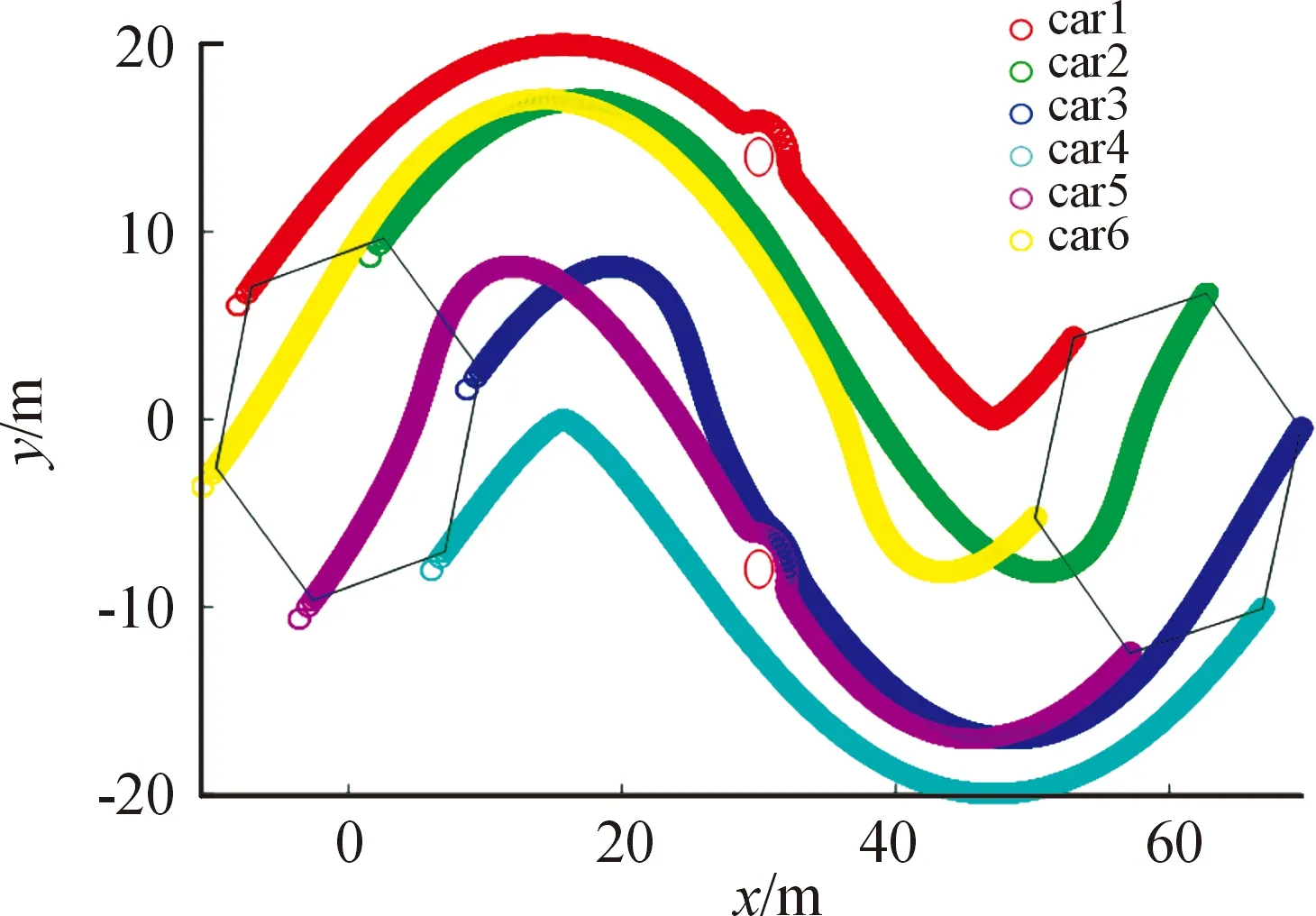
图6 编队避障路径示意图Fig.6 Formation obstacle avoidance path
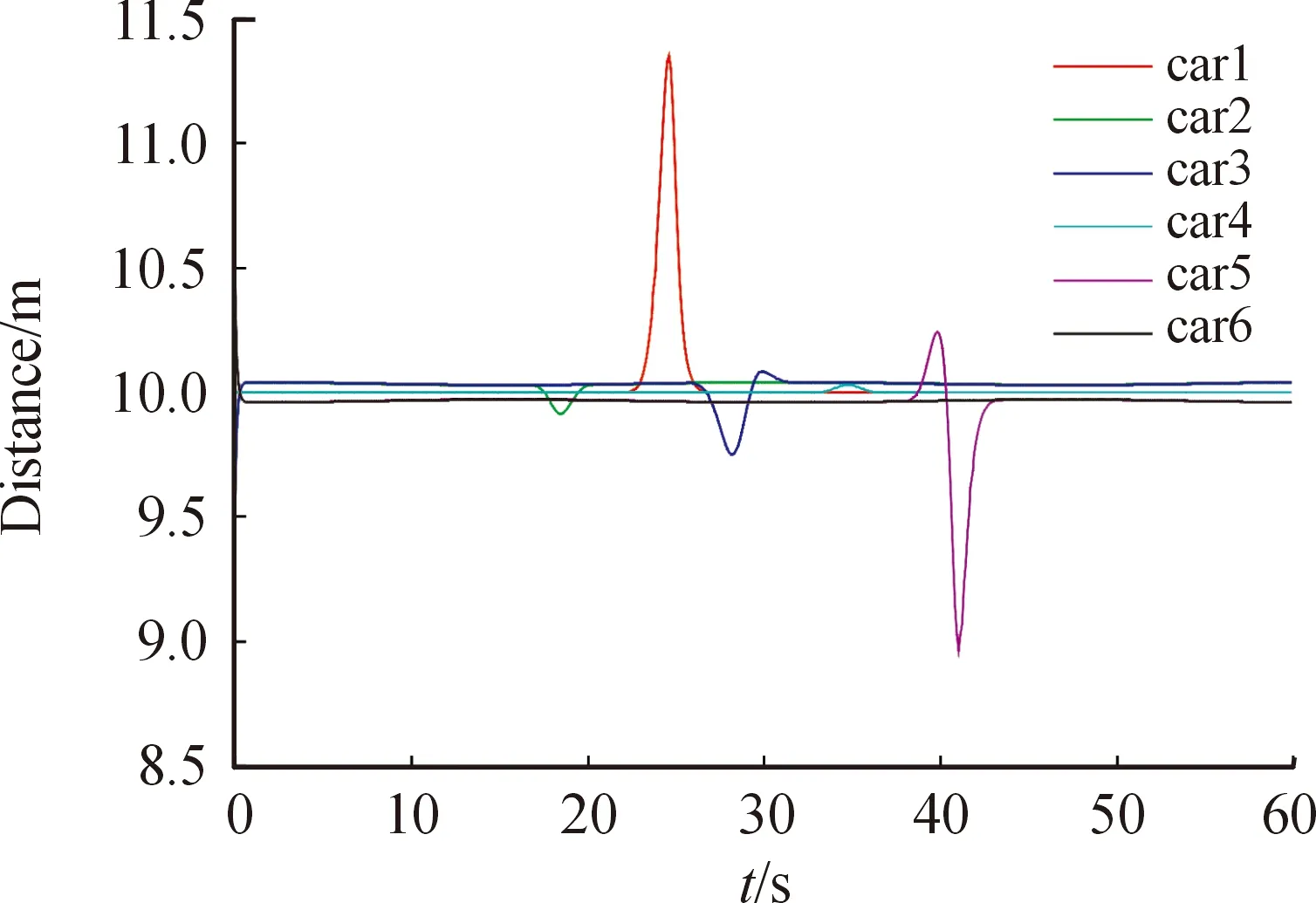
图7 编队车辆与VRF的距离曲线Fig.7 Distance between formation vehicle and VRF
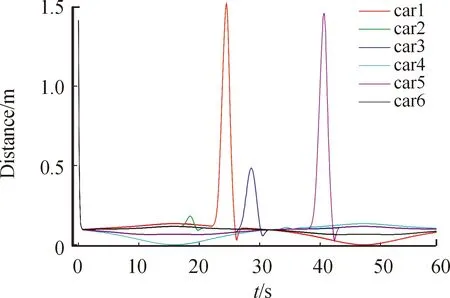
图8 编队车辆与虚拟点车辆距离曲线Fig.8 Distance between formation vehicles and virtual point vehicles
5 结论
1) 针对传统的虚拟结构中虚拟点不具有避障功能的问题,提出了可使虚拟结构中每个虚拟点都能实现避障功能的虚拟结构法与人工势场法相结合的编队算法,构建的车辆总势场力方程具有稳定性;
2) 仿真验证了各车辆可实现单独避障,并在避障后可及时跟踪虚拟结构中对应的虚拟点,从而较快恢复编队行驶,且编队路径变化较为平缓。