牵引式颈椎外骨骼结构设计与运动学分析
2022-10-13江伟石萍杜妍辰李素娇喻洪流
江伟,石萍,杜妍辰,李素娇,喻洪流
上海理工大学 康复工程与技术研究所(上海,200093)
0 引言
现如今,颈椎病是脊柱疾病中最常见的疾病,它是由性别、年龄、职业和生活方式等方面引起的退行性变化,颈部疼痛主要是由于脊柱负荷不均引起的最常见的症状之一[1]。颈椎病是指颈椎关节如钩椎关节、小关节和椎间盘的骨关节炎的变性,引起多种运动和感觉功能障碍,可能包括骨赘或软骨骨刺的形成,椎间盘突出,小关节突或韧带肥大,影响椎管直径和矢状面灵活性[2-4]。引起颈椎病的因素有很多,如头部前倾、颈部紧张、压力、抑郁、运动、职业等[5-6],颈椎椎体小也是引起颈椎病的因素之一[7]。它的症状主要包括颈部和手臂疼痛以及手臂和手指麻木,颈部疼痛的患病率为23.1%,办公室和在电脑前的工作人员发病率最高,为21.3%[8]。
目前,颈椎病的治疗主要分为手术治疗和非手术(保守)治疗,对于一般的颈椎病,非手术治疗的疗效好,种类多,且不良反应小,亲和力高,临床上对颈椎病的治疗总发展趋势已逐渐转为非手术疗法为主的治疗方法[9]。在非手术治疗中,颈椎牵引一直被认为是最主要的治疗方法之一[10-11]。本研究主要是通过牵引的治疗方法设计一款可穿戴的颈椎牵引外骨骼。
牵引方法也可分为手动牵引和机械牵引,虽然手动牵引的康复效果好,但是治疗方法费时费力,这让部分患者不能得到及时的治疗。机械牵引不但可以提高治疗的准确性和稳定性,也能帮助医生提高治疗效率。目前市场上帮助康复颈椎病的辅助设备大多是起固定作用或者只能实现单自由度的牵引,类似于颈托固定器和脊柱矫形器,其目的只是避免让患者遭受二次伤害。
我们致力于研究一种轻便容易穿戴并且能够帮助患者进行牵引治疗的颈椎外骨骼,利用限位调节适用于90%~95%的患者,通过四个直线电机进行驱动完成牵引的过程。
1 外骨骼结构设计
颈椎是由七节锥体连接而成,如图1所示,从上到下分为C1~C7,C1连接颅骨,C7连接胸骨,是头颅和躯干的连接枢纽,在它周围有许多肌肉、血管和神经通过。颈椎关节非常灵活,屈曲运动以及头部转动主要由上颈椎段完成,即C1~C3,头部的大幅度伸屈主要在C5~C7节段,颈椎侧屈运动主要由中段颈椎完成。颈部肌肉的收缩和舒张使颈椎完成各种动作。

图1 人体颈椎结构Fig.1 Structure of human cervical spine
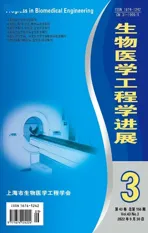
我们根据人体尺寸手册,设计了一款覆盖患者胸部、背部、颈骨、枕骨的外骨骼,通过四个直线电机驱动,电机的底端安装在胸板和背板上,电机上端安装在颈托和枕托上,为了保证牵引过程中有足够的自由度,电机的每一端都通过球铰固定在外骨骼上如图2所示。
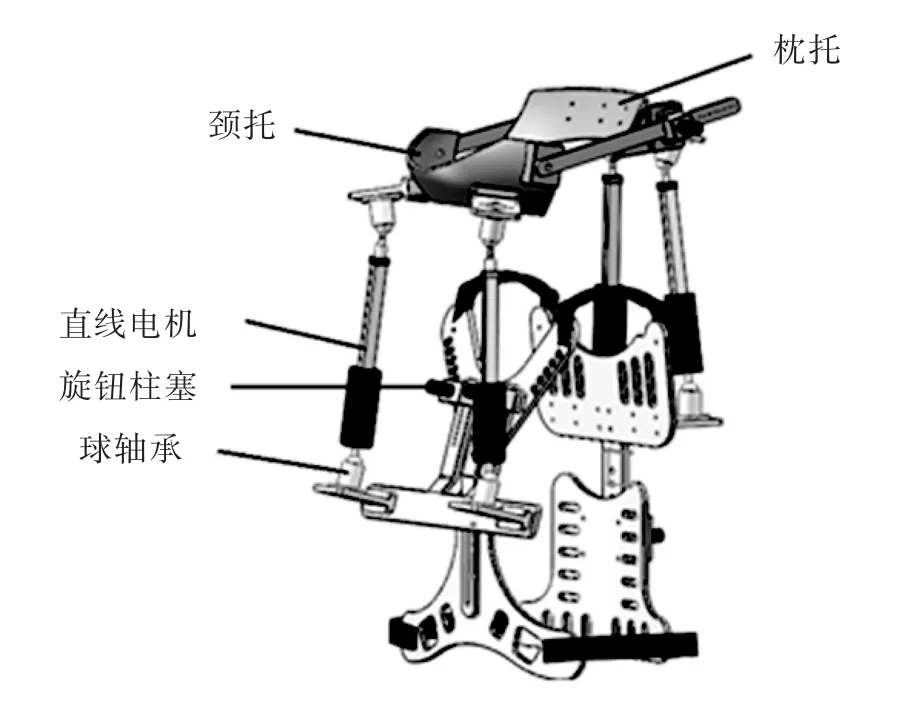
图2 颈椎外骨骼三维模型图Fig.2 Three-dimensional model of cervical exoskeleton
每个患者的身体尺寸都不同,为了避免对患者胸部造成挤压,利用旋钮柱塞不仅可以调节胸前电机的安装位置,还可以适用于下颌到剑突距离为260 mm~310 mm的患者。
覆盖在人体表面的外骨骼分为内外两部分,外部采用尼龙材料,密度为1 150 kg/cm3,内部垫一层记忆棉,这样不仅可以实现个性化穿戴,也能提高患者的舒适度,外骨骼实物照片如图3所示。本装置通过四个电机进行驱动,上下两端都与球铰连接,这就相当于是一个4-SPS的并联机构,四个电机底端的平面可以看作是静平台,电机的上端则是动平台,因为在并联机构中,为了使运动效果达到预期,动平台必须是一个整体,电机在工作的时候颈托和枕托是不能有相对运动的,所以两者要通过刚性连接。
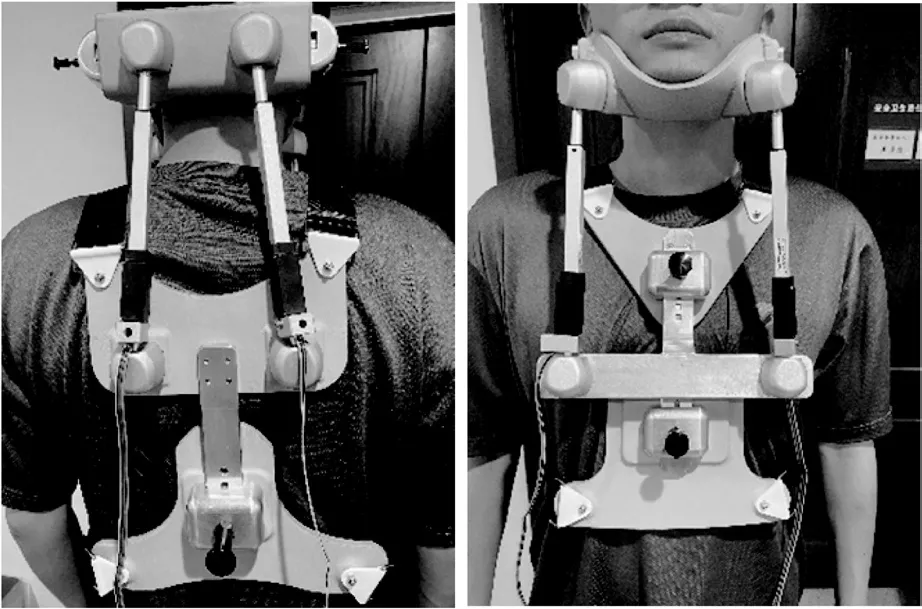
图3 颈椎外骨骼实物照片Fig.3 Physical picture of cervical vertebra exoskeleton
2 颈椎外骨骼SolidWorks Simulation静态力学分析
装置的受力点主要是颈托和枕托与电机连接的位置,使用SolidWorks对这两个组件进行静力学分析。首先颈托和枕托选取尼龙101材质,密度为1.15 g/cm3,为了完成一个静态分析,模型进行约束时必须正确,使模型无法移动,SolidWorks Simulation提供了各种夹具来约束模型。一般而言,夹具可以应用到模型的面、边、顶点。本研究将颈托与枕托两边的平面设置为固定约束模型,如图4所示。由于每个正常成年人头部质量为4~5 kg,因此在每个电机与枕托和颈托的连接处施加25 N的力,采用自由网格划分形式。
图4 网格化后的颈托枕托分析模型Fig.4 Analysis model of neck rest and pillow rest after grid
应力分析结果如图5所示,颈托的应力集中最大为0.226 kg/mm2,枕托的应力集中最大为0.273 kg/mm2,不足以对任何一个构件的结构造成破坏。

图5 颈托枕托的应力分析图Fig.5 Stress analysis of neck rest and pillow rest
3 运动分析
本装置主要通过四个直线电动推杆驱动,为了满足牵引所需的前屈后伸、左右侧屈、纵向拉伸以及水平旋转四个自由度,直线电动推杆的两端与球铰连接固定在外骨骼上,这就相当于是一个4-SPS的并联机构(S-球铰、P-移动副)。并联机构与串联机构相比具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、容易控制等一系列优点[12]。
所谓的机构运动学反解是指已知动平台的三转动量γ、β、α和三平移量x、y、z,反求该机构驱动的输入量即四个p副的移动量l1、l2、l3、l4。设定动平台为两个大小不相等的正方形,在平台上建立如图6所示的坐标系,定平台上坐标原点到每个球铰的距离为L,动平台上坐标原点到每个球铰的距离为l。定平台建立坐标系O-XYZ,用OA表示定坐标系,动平台建立坐标系O1-X1Y1Z1,用O1B表示动坐标系。
根据图6,Ai在定坐标系中的坐标为:

根据图6,Bi在动坐标系中的坐标为:

图6 并联机构坐标系图Fig.6 Coordinate system diagram of parallel mechanism

该机构只有一个自由度,所以动平台的P点相对于定坐标为:
利用齐次坐标进行坐标的变换,将并联机构动平台上的点Bi(i=1、2、3、4)在{PB}的位置矢量转换到定平台静坐标系{OA}中,如式(3)所示。


并联机构的反解表达式可以通过式(5)得出,即求得每条支链杆的驱动位移矢量li(i=1、2、3、4)。

两个点的坐标代入式(5)中,得出反解表达式(6)。

4 利用ADAMS建模及运动学仿真
为了进一步了解所设计的并联机构的运动情况,在仿真软件ADAMS上进行仿真研究。并联机构模型如图7所示。

图7 主体机构运动简图Fig.7 Schematic diagram of main motion mechanism
通过ADAMS对该并联机构进行逆运动学仿真,首先确定动平台的运动规律,得到每个驱动杆的伸缩变化规律。设置动平台的运动规律为X=π/15sin(t)、Y=0、Z= π/15sin(t),仿真参数时间为5 s,步长为0.1 s。四个驱动杆的位移与速度的仿真结果如图8和图9所示。
由图8、图9可以看出,四个驱动杆的位移以及在X、Y轴上的速度、加速度和角速度均呈周期性变化,这和初始条件下给定的驱动函数相对应,证明4-SPS并联机构具有合理的工作空间和良好的运动特性。
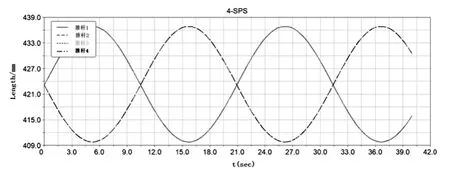
图8 主体机构运动简图Fig.8 Schematic diagram of main motion mechanism
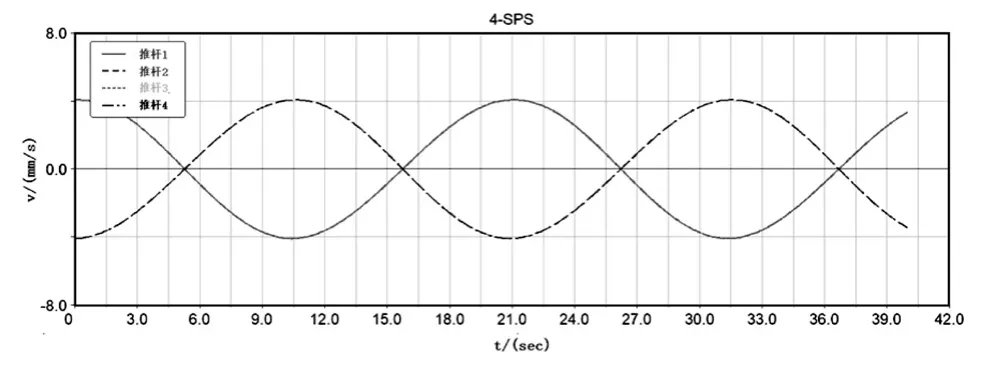
图9 侧面翻身机构简图Fig.9 Schematic diagram of side turning mechanism
5 结语
本研究设计了一种轻便容易穿戴并且能够帮助患者进行牵引治疗的颈椎外骨骼,利用SolidWorks进行建模并对牵引时主要受力点颈托和枕托进行静态力学分析,得出的数据验证所选材料不会造成模型结构的破坏。随后计算4-SPS并联机构的自由度以及对机构进行运动学分析,最后通过ADAMS软件仿真得到四个驱动杆的曲线图,结果证明了4-SPS并联机构具有合理的工作空间和良好的运动特性。
6 总结
目前,颈椎外骨骼康复设备的研究还停留在机构测试阶段,在实际使用时还会出现一些问题。但是该装置已经在多位有丰富临床经验的医生进行现场指导下,针对穿戴的舒适度、牵引角度的精确性等问题进行了测试,以后会通过对外骨骼材料的选型以及在外骨骼上加入传感器实现对电机的精确控制来解决这些问题。
颈椎病的康复治疗是一个比较枯燥并且漫长的过程,患者很难耐心地完成整个治疗周期。要想使患者积极地参与,就要激发他们的兴趣,未来的研究计划添加虚拟现实(VR)技术来丰富患者的体验,从而加快患者康复。